yolov3项目:https://github.com/wizyoung/YOLOv3_TensorFlow
数据集:安全帽佩戴数据集
感谢二位的工作。
yolov3训练
1. voc数据格式转换
- 修改
misc/parse_voc_xml.py中的相关参数
2. anchor参数设置
- Using the kmeans algorithm to get the prior anchors:
python get_kmeans.py
3. 开始训练
- 修改
args.py中的相关参数 - 训练
python train.py
4. 报错
- AssertionError: Annotation error! Please check your annotation file. Make sure there is at least one target object in each image.
检查发现train.txt中有图片没有目标。
问题: 项目中对数据集做了diffcult过滤
解决: 进行筛选,过滤这部分
5. 测试
- 修改
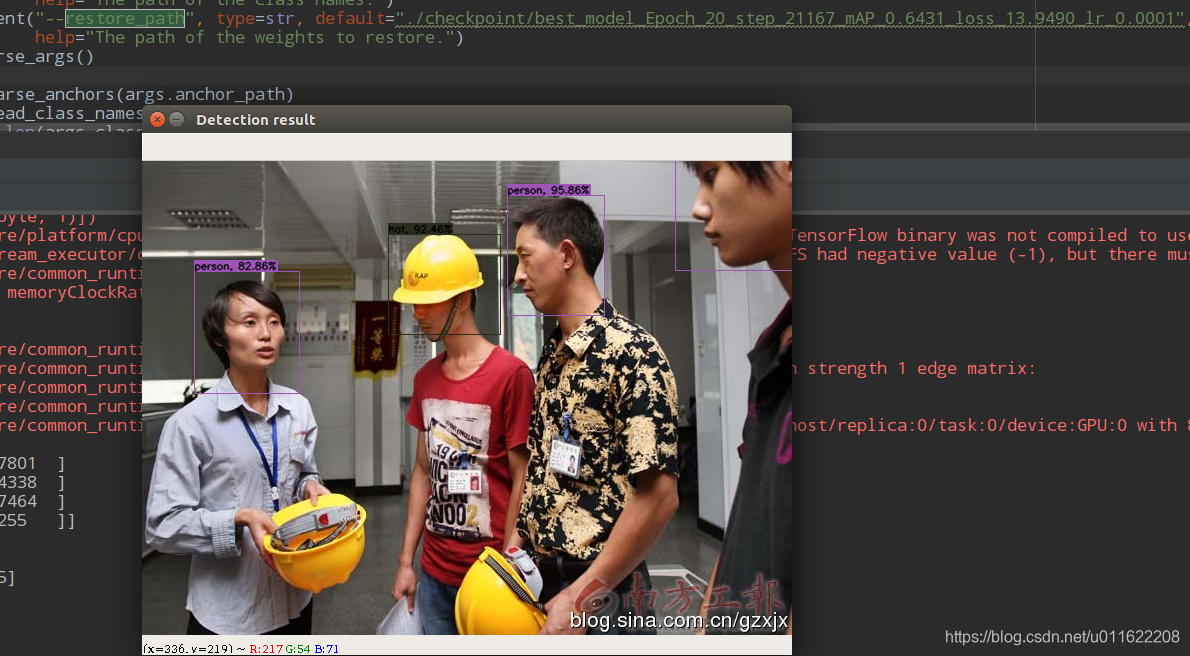
test_single_image.py中的参数 - 修改预训练的模型位置,注意不带后缀。如下:
parser.add_argument("--restore_path", type=str, default="./checkpoint/best_model_Epoch_20_step_21167_mAP_0.6431_loss_13.9490_lr_0.0001",
help="The path of the weights to restore.")
- 结果
Atlas转换
1. 转pd模型
参考:https://bbs.huaweicloud.com/forum/thread-45383-1-1.html
import tensorflow as tf
from tensorflow.python.framework import graph_util
from tensorflow.python.platform import gfile
def freeze_graph(input_path, output_path):
output_node_names = "yolov3/yolov3_head/feature_map_1,yolov3/yolov3_head/feature_map_2,yolov3/yolov3_head/feature_map_3"
saver = tf.train.import_meta_graph(input_path+".meta", clear_devices=True)
graph = tf.get_default_graph()
input_graph_def = graph.as_graph_def()
with tf.Session() as sess:
saver.restore(sess, input_path)
output_graph_def = graph_util.convert_variables_to_constants(
sess=sess,
input_graph_def=input_graph_def, # = sess.graph_def,
output_node_names=output_node_names.split(","))
with tf.gfile.GFile(output_path, 'wb') as fgraph:
fgraph.write(output_graph_def.SerializeToString())
if __name__=="__main__":
input_path = "./checkpoint/best_model_Epoch_20_step_21167_mAP_0.6431_loss_13.9490_lr_0.0001"
output_path = "./checkpoint/yolov3_helmet.pb"
freeze_graph(input_path, output_path)
2. 转om模型
omg --framework 3 --model ./yolov3_helmet.pb --output yolov3_helmet --insert_op_conf ./aipp_yolov3_picture.cfg
- 问题1
[ERROR] FMK:2020-06-22-14:08:11.056.383 Parse:framework/domi/omg/…/omg/parser/tensorflow/tensorflow_parser.cpp:779:“Unsupport op type Iterator”
The pre-checking report has been saved to check_result.json.
[ERROR] FMK:2020-06-22-14:08:11.099.514 Generate:framework/domi/omg/omg.cpp:732:“OMG model parse ret fail. Error Code:0x3000004()”
[ERROR] FMK:2020-06-22-14:08:11.102.277 main:framework/domi/omg_main/main.cpp:797:“OMG Generate execute failed!!”
OMG generate offline model failed. Please see the log or pre-checking report for more details.
[INFO] RUNTIME:2020-06-22-14:08:11.104.122 22840 runtime/feature/src/driver.cc:57 ~Driver:deconstruct driver
解决: 暂无
换https://github.com/JesseYule/ObjectDetection-YOLOv3试一下。
猜想: 没有换,想着这个问题,心里就不开心,难受。
- 项目模型训练的输入,是一个iterator,
image_ids, image, y_true_13, y_true_26, y_true_52 = iterator.get_next() https://github.com/JesseYule/ObjectDetection-YOLOv3项目中使用的是placeholder进行占位的- 如我所想
- 下面是tensorflow模型转om模型的代码
# coding: utf-8
# for more details about the yolo darknet weights file, refer to
# https://itnext.io/implementing-yolo-v3-in-tensorflow-tf-slim-c3c55ff59dbe
from __future__ import division, print_function
import os
import sys
import tensorflow as tf
import numpy as np
from model import yolov3
from utils.misc_utils import parse_anchors, load_weights, freeze_graph
num_class = 2 # 0. 类别和输入尺寸和训练时保持一直
img_size = 416
ckpt_path = "./checkpoint/best_model_Epoch_20_step_21167_mAP_0.6431_loss_13.9490_lr_0.0001" # 1. 训练得到的模型位置
save_path = './checkpoint/yolov3_helmet.pd'
anchors = parse_anchors('./data/my_data/helmet_anchors.txt') # 2. 使用训练时的anchors文件
model = yolov3(num_class, anchors)
with tf.Session() as sess:
inputs = tf.placeholder(tf.float32, [1, img_size, img_size, 3]) # 3. 输入用placeholder占位
with tf.variable_scope('yolov3'):
feature_map = model.forward(inputs, is_training=False)
saver = tf.train.Saver(var_list=tf.global_variables(scope='yolov3'))
saver.restore(sess, ckpt_path)
feature_map_1, feature_map_2, feature_map_3 = feature_map
our_out_node_names = ["yolov3/yolov3_head/feature_map_1", "yolov3/yolov3_head/feature_map_2", "yolov3/yolov3_head/feature_map_3"]
freeze_graph(sess, save_path, our_out_node_names)
print('TensorFlow model checkpoint has been saved to {}'.format(save_path))
- 转om模型
omg --framework 3 --model yolov3_helmet.pd --output yolov3_helmet --insert_op_conf aipp_yolov3_picture.cfg --input_shape "Placeholder:1,416,416,3"
2.1 atlas500测试
1. 修改源码/编译
-
修改文件
InferObjectDection/ObjectDetectionEngine.h- const int CLASS_NUM = 2 类别数量
- static float g_biases[BIASES_NUM] = {5,5, 6,7, 7,9, 10,11, 13,15, 19,21, 27,31, 43,50, 79,93} 训练用的anchor参数
-
编译
cd $InferObjectDection
bash ./build.sh A500
2. 挂载共享文件夹(可选)
mount -t nfs -o nolock -o tcp -o rsize=32768,wsize=32768 192.168.143.106:/home/yangna/deepblue/36_HUAWEI/2_Atlas/1_Atlas500/samples/Samples/InferObjectDetection ./dbface_out
3. 测试
./ObjectDetection -i 000009.jpg -t 2 -m ./yolov3_helmet.om -g ./graph.config -s 0 -e 0
4. 结果
***start device 0, end device 0***
device = 0, graphID = 1 init success
[mainG_MODEL]:g_modelType: 2
[INF] channel 0, frame 0 have 3 object
#0, bbox( 247, 9, 361, 148) confidence: 0.978974 classId is 0
#1, bbox( 361, 0, 462, 130) confidence: 0.985772 classId is 1
#2, bbox( 57, 75, 158, 217) confidence: 0.898902 classId is 1
[INFO] graphID:1 is over!
- 可视化结果
- tensorflow结果

- atlas结果

- tensorflow结果
- atlas结果

- tensorflow结果

问题1 结果有点问题。
测试的时候将t参数赋值为2了。正确的命令:
./ObjectDetection -i 000009.jpg -t 1 -m ./yolov3_helmet.om -g ./graph.config -s 0 -e 0
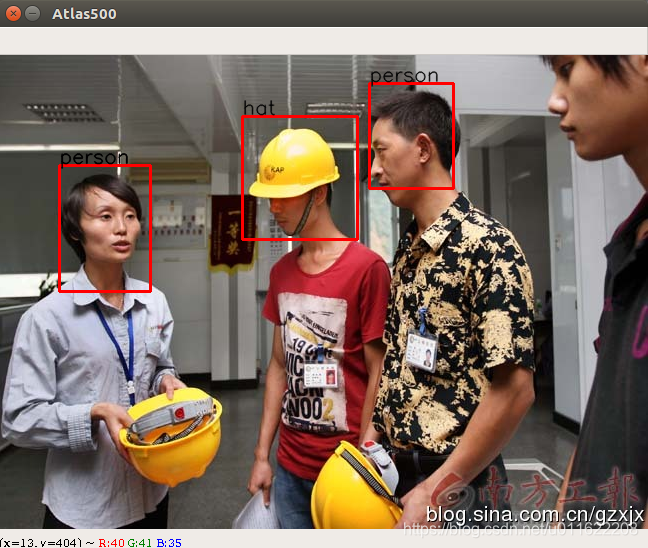
问题: 输出结果和tensorflow还是有一点儿差别。
猜想
- 转pd的问题
- 转om的问题