红外遥控器控制小车,小车自带超声波避障,遥控器可以打开循迹,打开循迹后自己循迹走。没打开循迹就红外遥控器控制小车走。
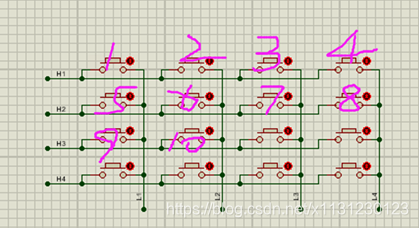
按键如下
1 进入或者退出循迹功能,循迹模式下对小车操作无效
2 前进
5 左转
6 停止
7 右转
10 后退
循迹依靠P1.3 P1.4的红外探测:
/* 寻迹 */
void tracking()
{
/* 为0 没有识别到黑线 为1识别到黑线 */
if ( left_led1 == 1 && right_led1 == 1 ) /* 左右寻迹探头识别到黑线 */
{
forward(); /* 前进 */
}else {
if ( left_led1 == 1 && right_led1 == 0 ) /* 小车右边出线,左转修正 */
{
left(); /* 左转 */
}
if ( left_led1 == 0 && right_led1 == 1 ) /* 小车左边出线,右转修正 */
{
right(); /* 右转 */
}
if ( left_led1 == 0 && right_led1 == 0 ) /* 左右寻迹探头都没识别到黑线 */
{
backward(); /* 后退 */
}
}
}
避障一直带有:
/*超声波避障111111*/
void Avoid1()
{
if ( distance < 50 ) /* 如果前方有障碍物进行左转 前方没有障碍物就直行 */
{
left();
}else
{
forward();
}
}