nRF24L01无线通信模块使用简介(STC51)发送端
研一课设做过一个基于nRF24L01的无线温湿度传感器,在这里把C51单片机搭配nRF24L01的无线通信模块部分单独拿出来简单写一下,包含代码。
nRF24L01
nRF24L01是由NORDIC生产的工作在2.4GHz~2.5GHz的ISM 频段的单片无线收发器芯片。无线收发器包括:频率发生器、增强型“SchockBurst”模式控制器、功率放大器、晶体振荡器、调制器和解调器。(百度百科)
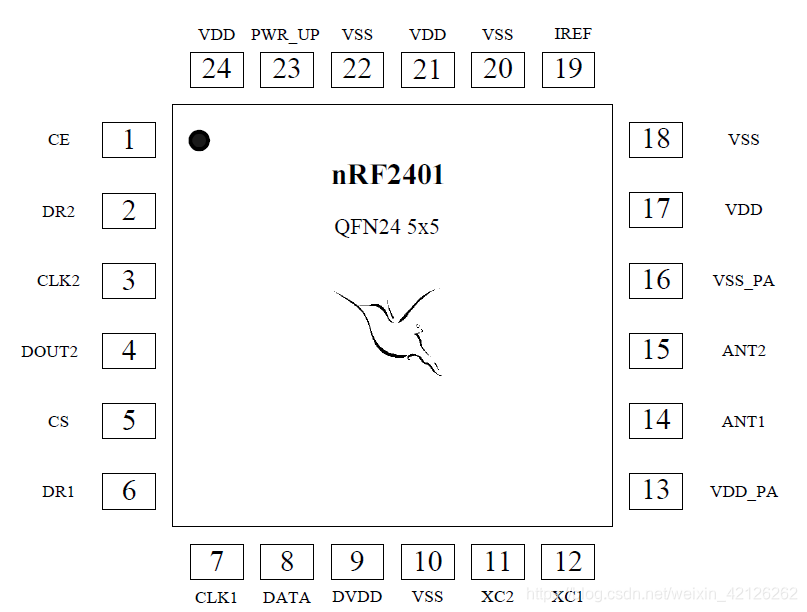
nRF2401的芯片封装图如下,共24pin。
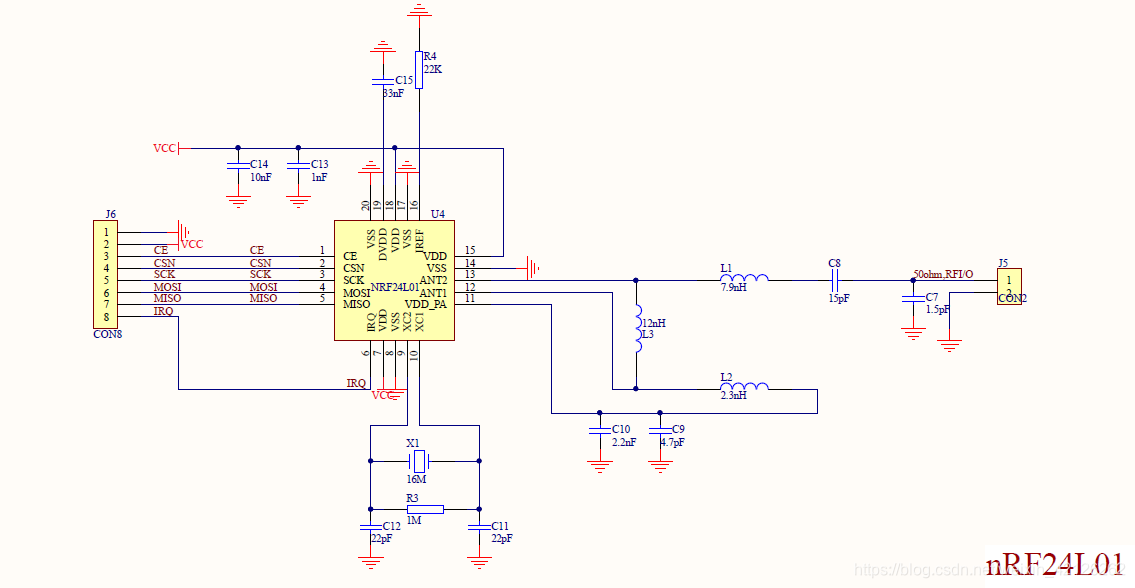
这个芯片的最大特点是无需复杂的通信协议,程序简单,搭配C51就能跑,是小型无线传感器的首选,相比zigbee要简单不少。下面是市面上常见的基于该芯片的通信模块原理图。
针脚说明:
| 名称 | 功能 | |
|---|---|---|
| 1 pin | GND | 地 |
| 2 pin | VCC | 电源 |
| 3 pin | CE | 使能端 |
| 4 pin | CSN | 片选端 |
| 5 pin | SCK | 时钟输入 |
| 6 pin | MOSI | 数据输入 |
| 7 pin | MISO | 数据输出 |
| 8 pin | IRQ | 中断输入 |
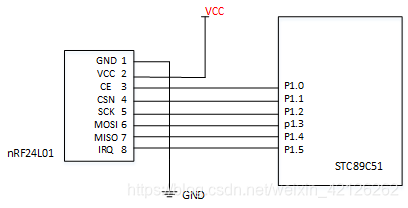
与C51连线(3pin~8pin引脚与C51的连接可自行更改,但是同时需要注意引脚初始化也应更改):
引脚初始化:
sbit CE = P1^0;
sbit CSN= P1^1;
sbit SCK= P1^2;
sbit MOSI= P1^3;
sbit MISO= P1^4;
sbit IRQ = P1^5;
下面废话少说直接给出代码:
这里给出发送端的代码,接收端代码见下一篇博客:)
#include <reg51.h>
#include <intrins.h>
#include <math.h>
#define uchar unsigned char
#define uint unsigned int
/***************************************************/
#define TX_ADR_WIDTH 5 // 5字节宽度的发送/接收地址
#define TX_PLOAD_WIDTH 15 // 数据通道有效数据宽度
//sbit LED = P2^1;
sbit LED = P3^3;
sbit KEY1 = P3^1;
sbit KEY2 = P3^2;
uchar code TX_ADDRESS[5] = {0x34,0x43,0x10,0x10,0x01}; // 定义一个静态发送地址
uchar RX_BUF[TX_PLOAD_WIDTH];
uchar TX_BUF[TX_PLOAD_WIDTH];
uchar flag;
uchar DATA = 0x01;
uchar bdata sta;
sbit RX_DR = sta^6;
sbit TX_DS = sta^5;
sbit MAX_RT = sta^4;
sbit CE = P1^5;
sbit CSN= P1^4;
sbit SCK= P1^3;
sbit MOSI= P1^2;
sbit MISO= P1^1;
sbit IRQ = P1^0;
uchar rec_dat[5]; //发送数据的数组
rec_dat[5] = {0x01, 0x02, 0x03, 0x04, 0x05};
// SPI(nRF24L01) commands
#define READ_REG 0x00 // Define read command to register
#define WRITE_REG 0x20 // Define write command to register
#define RD_RX_PLOAD 0x61 // Define RX payload register address
#define WR_TX_PLOAD 0xA0 // Define TX payload register address
#define FLUSH_TX 0xE1 // Define flush TX register command
#define FLUSH_RX 0xE2 // Define flush RX register command
#define REUSE_TX_PL 0xE3 // Define reuse TX payload register command
#define NOP 0xFF // Define No Operation, might be used to read status register
// SPI(nRF24L01) registers(addresses)
#define CONFIG 0x00 // 'Config' register address
#define EN_AA 0x01 // 'Enable Auto Acknowledgment' register address
#define EN_RXADDR 0x02 // 'Enabled RX addresses' register address
#define SETUP_AW 0x03 // 'Setup address width' register address
#define SETUP_RETR 0x04 // 'Setup Auto. Retrans' register address
#define RF_CH 0x05 // 'RF channel' register address
#define RF_SETUP 0x06 // 'RF setup' register address
#define STATUS 0x07 // 'Status' register address
#define OBSERVE_TX 0x08 // 'Observe TX' register address
#define CD 0x09 // 'Carrier Detect' register address
#define RX_ADDR_P0 0x0A // 'RX address pipe0' register address
#define RX_ADDR_P1 0x0B // 'RX address pipe1' register address
#define RX_ADDR_P2 0x0C // 'RX address pipe2' register address
#define RX_ADDR_P3 0x0D // 'RX address pipe3' register address
#define RX_ADDR_P4 0x0E // 'RX address pipe4' register address
#define RX_ADDR_P5 0x0F // 'RX address pipe5' register address
#define TX_ADDR 0x10 // 'TX address' register address
#define RX_PW_P0 0x11 // 'RX payload width, pipe0' register address
#define RX_PW_P1 0x12 // 'RX payload width, pipe1' register address
#define RX_PW_P2 0x13 // 'RX payload width, pipe2' register address
#define RX_PW_P3 0x14 // 'RX payload width, pipe3' register address
#define RX_PW_P4 0x15 // 'RX payload width, pipe4' register address
#define RX_PW_P5 0x16 // 'RX payload width, pipe5' register address
#define FIFO_STATUS 0x17 // 'FIFO Status Register' register address
void blink(char i);
/**************************************************
函数: init_io()
描述:
初始化IO
/**************************************************/
void init_io(void)
{
CE = 0; // 待机
CSN = 1; // SPI禁止
SCK = 0; // SPI时钟置低
IRQ = 1; // 中断复位
LED = 1; // 关闭指示灯
}
/**************************************************/
/**************************************************
函数:delay_ms()
描述:
延迟x毫秒
/**************************************************/
void delay_ms(uchar x)
{
uchar i, j;
i = 0;
for(i=0; i<x; i++)
{
j = 250;
while(--j);
j = 250;
while(--j);
}
}
/**************************************************/
/**************************************************
函数:SPI_RW()
描述:
根据SPI协议,写一字节数据到nRF24L01,同时从nRF24L01
读出一字节
/**************************************************/
uchar SPI_RW(uchar byte)
{
uchar i;
for(i=0; i<8; i++) // 循环8次
{
MOSI = (byte & 0x80); // byte最高位输出到MOSI
byte <<= 1; // 低一位移位到最高位
SCK = 1; // 拉高SCK,nRF24L01从MOSI读入1位数据,同时从MISO输出1位数据
byte |= MISO; // 读MISO到byte最低位
SCK = 0; // SCK置低
}
return(byte); // 返回读出的一字节
}
/**************************************************/
/**************************************************
函数:SPI_RW_Reg()
描述:
写数据value到reg寄存器
/**************************************************/
uchar SPI_RW_Reg(uchar reg, uchar value)
{
uchar status;
CSN = 0; // CSN置低,开始传输数据
status = SPI_RW(reg); // 选择寄存器,同时返回状态字
SPI_RW(value); // 然后写数据到该寄存器
CSN = 1; // CSN拉高,结束数据传输
return(status); // 返回状态寄存器
}
/**************************************************/
/**************************************************
函数:SPI_Read()
描述:
从reg寄存器读一字节
/**************************************************/
uchar SPI_Read(uchar reg)
{
uchar reg_val;
CSN = 0; // CSN置低,开始传输数据
SPI_RW(reg); // 选择寄存器
reg_val = SPI_RW(0); // 然后从该寄存器读数据
CSN = 1; // CSN拉高,结束数据传输
return(reg_val); // 返回寄存器数据
}
/**************************************************/
/**************************************************
函数:SPI_Read_Buf()
描述:
从reg寄存器读出bytes个字节,通常用来读取接收通道
数据或接收/发送地址
/**************************************************/
uchar SPI_Read_Buf(uchar reg, uchar * pBuf, uchar bytes)
{
uchar status, i;
CSN = 0; // CSN置低,开始传输数据
status = SPI_RW(reg); // 选择寄存器,同时返回状态字
for(i=0; i<bytes; i++)
pBuf[i] = SPI_RW(0); // 逐个字节从nRF24L01读出
CSN = 1; // CSN拉高,结束数据传输
return(status); // 返回状态寄存器
}
/**************************************************/
/**************************************************
函数:SPI_Write_Buf()
描述:
把pBuf缓存中的数据写入到nRF24L01,通常用来写入发
射通道数据或接收/发送地址
/**************************************************/
uchar SPI_Write_Buf(uchar reg, uchar * pBuf, uchar bytes)
{
uchar status, i;
CSN = 0; // CSN置低,开始传输数据
status = SPI_RW(reg); // 选择寄存器,同时返回状态字
for(i=0; i<bytes; i++)
SPI_RW(pBuf[i]); // 逐个字节写入nRF24L01
CSN = 1; // CSN拉高,结束数据传输
return(status); // 返回状态寄存器
}
/**************************************************/
/**************************************************
函数:RX_Mode()
描述:
这个函数设置nRF24L01为接收模式,等待接收发送设备的数据包
/**************************************************/
void RX_Mode(void)
{
CE = 0;
SPI_Write_Buf(WRITE_REG + RX_ADDR_P0, TX_ADDRESS, TX_ADR_WIDTH); // 接收设备接收通道0使用和发送设备相同的发送地址
SPI_RW_Reg(WRITE_REG + EN_AA, 0x01); // 使能接收通道0自动应答
SPI_RW_Reg(WRITE_REG + EN_RXADDR, 0x01); // 使能接收通道0
SPI_RW_Reg(WRITE_REG + RF_CH, 40); // 选择射频通道0x40
SPI_RW_Reg(WRITE_REG + RX_PW_P0, TX_PLOAD_WIDTH); // 接收通道0选择和发送通道相同有效数据宽度
SPI_RW_Reg(WRITE_REG + RF_SETUP, 0x07); // 数据传输率1Mbps,发射功率0dBm,低噪声放大器增益
SPI_RW_Reg(WRITE_REG + CONFIG, 0x0f); // CRC使能,16位CRC校验,上电,接收模式
delay_ms(150);
CE = 1; // 拉高CE启动接收设备
}
/**************************************************/
/**************************************************
函数:TX_Mode()
描述:
这个函数设置nRF24L01为发送模式,(CE=1持续至少10us),
130us后启动发射,数据发送结束后,发送模块自动转入接收
模式等待应答信号。
/**************************************************/
void TX_Mode(uchar * BUF)
{
CE = 0;
SPI_Write_Buf(WRITE_REG + TX_ADDR, TX_ADDRESS, TX_ADR_WIDTH); // 写入发送地址
SPI_Write_Buf(WRITE_REG + RX_ADDR_P0, TX_ADDRESS, TX_ADR_WIDTH); // 为了应答接收设备,接收通道0地址和发送地址相同
SPI_Write_Buf(WR_TX_PLOAD, BUF, TX_PLOAD_WIDTH); // 写数据包到TX FIFO
SPI_RW_Reg(WRITE_REG + EN_AA, 0x01); // 使能接收通道0自动应答
SPI_RW_Reg(WRITE_REG + EN_RXADDR, 0x01); // 使能接收通道0
SPI_RW_Reg(WRITE_REG + SETUP_RETR, 0x0a); // 自动重发延时等待250us+86us,自动重发10次
SPI_RW_Reg(WRITE_REG + RF_CH, 40); // 选择射频通道0x40
SPI_RW_Reg(WRITE_REG + RF_SETUP, 0x07); // 数据传输率1Mbps,发射功率0dBm,低噪声放大器增益
SPI_RW_Reg(WRITE_REG + CONFIG, 0x0e); // CRC使能,16位CRC校验,上电
delay_ms(150);
CE = 1;
}
/**************************************************/
/**************************************************
函数:Check_ACK()
描述:
检查接收设备有无接收到数据包,设定没有收到应答信
号是否重发
/**************************************************/
uchar Check_ACK(bit clear)
{
delay_ms(200);
while(IRQ);
sta = SPI_RW(NOP); // 返回状态寄存器
if(TX_DS)
{
blink(3);
}
//blink(5);
if(MAX_RT)
if(clear) // 是否清除TX FIFO,没有清除在复位MAX_RT中断标志后重发
SPI_RW(FLUSH_TX);
SPI_RW_Reg(WRITE_REG + STATUS, sta); // 清除TX_DS或MAX_RT中断标志
IRQ = 1;
if(TX_DS)
return(0x00);
else
return(0xff);
}
/**************************************************/
/******************************************************
/*函数:uart_init()
/*功能:初始化uart
/*******************************************************/
void uart_init()
{
TMOD=0x20; //定时器1工作于8位自动重载模式, 用于产生波特率
TH1=0xFD;//波特率9600
TL1=0xFD;
SCON=0x50; //设定串行口工作方式
TR1=1; //启动定时器1
}
void blink(char i)
{
while(i--)
{
LED = 1;
delay_ms(500);
LED = 0;
delay_ms(500);
}
}
/**************************************************
函数:nRF_Check()
描述:
检查nRF24L01是否连接正常
/**************************************************/
int nRF_Check(void)
{
uchar buf[5]={0xC2,0xC2,0xC2,0xC2,0xC2};
uchar buf1[5];
int i;
/*写入5个字节的地址. */
SPI_Write_Buf(WRITE_REG+TX_ADDR,buf,5);
/*读出写入的地址 */
SPI_Write_Buf(TX_ADDR,buf1,5);
/*比较*/
for(i=0;i<5;i++)
{
if(buf1[i]!=0xC2)
break;
}
if(i==5)
return 0 ; //MCU与NRF成功连接
else
return 1 ; //MCU与NRF不正常连接
}
/**************************************************/
void main(void)
{
uchar status;
uchar i;
unsigned int temp;
init_io(); //初始化IO
uart_init(); //UART初始化
while(1)
{
blink(2);
delay_ms(20);
for(i=0;i<5;i++) //装载数据
{
TX_BUF[i] = rec_dat[i]; // 数据送到缓存
}
TX_Mode(TX_BUF);
status = 0;
if (status == 0)
{
LED = 0;
}
else
{
delay_ms(250);
blink(3); //闪烁3下表示nRF24L01连接失败
}
delay_ms(250);
LED = 1;
delay_ms(250);
}
}
这段代码将rec_dat[5]这个数组的数据通过nRF24L01发送,这个数组的大小和内容都可以自定义。在实际使用的过程中,可以让传感器或者其他设备的数据赋值给这个数组,之后就可以实现多功能的无线通信了:D
接收端代码在下一篇博客中给出,敬请期待。