
最新版本的mmdetection2.0 (v2.0.0)环境搭建、训练自己的数据集、测试及常见错误集合
文章目录:
本人环境声明:
系统环境:Ubuntu18.04.1cuda版本:10.2.89cudnn版本:7.6.5torch版本:1.5.0torchvision版本:0.6.0mmcv版本:0.5.5- 项目代码
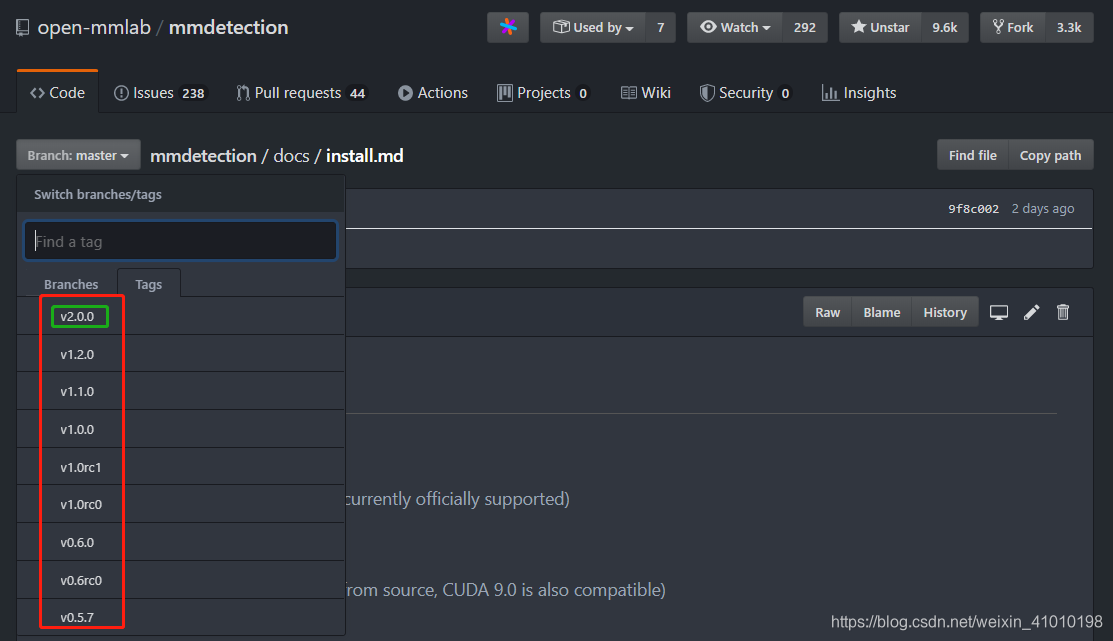
mmdetection v2.0.0,官网是在20200506正式发布的v2.0.0版本
环境搭建和项目代码下载时间:2020年5月26号,当前最新代码,版本是:v2.0.0
注意:
这个版本的代码文件结构上改动比较大,还有一些细节性的东西,我会在文中详细阐述!
mmdetection v2.0.0版本的主要重构和修改,如下(详细参考):
1、速度更快:针对常见模型优化了训练和推理速度,将训练速度提高了30%,将推理速度提高了25%。更多模型细节请参考:model_zoo
2、性能更高:更改了一些默认的超参数而没有额外的费用,这导致大多数模型的性能得到提高。有关详细信息,请参阅兼容性
3、更多文档和教程:添加了许多文档和教程来帮助用户更轻松地入门,在这里阅读。
4、支持PyTorch 1.5:不再支持1.1和1.2,切换到一些新的API。
5、更好的配置系统:支持继承以减少配置的冗余。
6、更好的模块化设计:为了实现简单和灵活的目标,我们简化了封装过程,同时添加了更多其他可配置模块,例如BBoxCoder,IoUCalculator,OptimizerConstructor,RoIHead。标头中还包含目标计算,并且调用层次结构更简单。
MMDetection 1.x的突破性模型培训与2.0版本不完全兼容,有关详细信息以及如何迁移到新版本,请参阅兼容性文档。
数据声明:
这里我以:VOC2007数据集作为训练数据,主要是为了方便快捷的做一个POC的验证,同时节省数据标注的时间,文中会详细阐述如何自定义自己的数据集,和修改修改和数据集相关的位置。
VOC2007数据下载:
1 mmdetection环境搭建
查看Cuda和cudnn的版本,参考
在Linux下查看cuda的版本:
cat /usr/local/cuda/version.txt
示例:
(mmdetection) zpp@estar-cvip:/HDD/zpp/shl/mmdetection$ cat /usr/local/cuda/version.txt
CUDA Version 10.2.89
(mmdetection) zpp@estar-cvip:/HDD/zpp/shl/mmdetection$
在Linux下查看cudnn的版本:
cat /usr/local/cuda/include/cudnn.h | grep CUDNN_MAJOR -A 2
示例:
(mmdetection) zpp@estar-cvip:/HDD/zpp/shl/mmdetection$ cat /usr/local/cuda/include/cudnn.h | grep CUDNN_MAJOR -A 2
#define CUDNN_MAJOR 7
#define CUDNN_MINOR 6
#define CUDNN_PATCHLEVEL 5
--
#define CUDNN_VERSION (CUDNN_MAJOR * 1000 + CUDNN_MINOR * 100 + CUDNN_PATCHLEVEL)
#include "driver_types.h"
(mmdetection) zpp@estar-cvip:/HDD/zpp/shl/mmdetection$
如上,我的cudnn版本是:7.6.5
1.1 搭建虚拟环境
1、创建虚拟环境:
conda create -n mmdetection python=3.7
2、激活虚拟环境
conda acitvate mmdetection或source activate mmdetection
退出虚拟环境:
conda deactivate或source deactivate
注意:
在安装下面的环境的时候,一定要确保自己在虚拟环境中,不要退出来
1.2 安装必要的库包
安装torch、torchvision、mmcv库包
pip install -i https://pypi.tuna.tsinghua.edu.cn/simple torch==1.5.0 torchvision==0.6.0 mmcv==0.5.5
我安装的版本:
torch==1.5.0
torchvision==0.6.0
mmcv==0.5.5
Cython==0.29.16
注意:
如果下载经常中断,建议先把torch的.whl库包文件下载下来,然后使用pip intall torch_xxxx.whl进行安装
torch1.5.0下载地址:点我-》带你去https://pypi.tuna.tsinghua.edu.cn/packages/76/58/668ffb25215b3f8231a550a227be7f905f514859c70a65ca59d28f9b7f60/torch-1.5.0-cp37-cp37m-manylinux1_x86_64.whl
1.3 下载mmdetection
1、克隆mmdetection到本地
git clone https://github.com/open-mmlab/mmdetection.git
如果git clone下载的速度太慢,可以使用github的镜像进行下载,如下:
或 :
git clone https://github.com.cnpmjs.org/open-mmlab/mmdetection.git
2、进入到项目目录中
cd mmdetection
1.4 安装mmdetection依赖和编译mmdetection
1.4.1 安装mmdetection依赖
- 安装依赖的库,同时会检查一些库包的版本是否符合
pip install -r requirements/build.txt
mmdetection/requirements.txt定义的内容:
-r requirements/build.txt
-r requirements/optional.txt
-r requirements/runtime.txt
-r requirements/tests.txt
可看到,一共有四个安装依赖文件:build.txt, optional.txt, runtime.txt, tests.txt,四个依赖文件中定义的内容如下:
# build.txt
# These must be installed before building mmdetection
numpy
torch>=1.3
####################################################
# optional.txt
albumentations>=0.3.2
cityscapesscripts
imagecorruptions
##################################################
# runtime.txt
matplotlib
mmcv>=0.5.1
numpy
# need older pillow until torchvision is fixed
Pillow<=6.2.2
six
terminaltables
torch>=1.3
torchvision
##################################################
# tests.txt
asynctest
codecov
flake8
isort
# Note: used for kwarray.group_items, this may be ported to mmcv in the future.
kwarray
pytest
pytest-cov
pytest-runner
ubelt
xdoctest >= 0.10.0
yapf
会安装一些没有的依赖库,同时会检查安装依赖库的版本是否符合要求。
1.4.2 安装cocoapi
- 安装库包
cocoapi
pip install "git+https://github.com/cocodataset/cocoapi.git#subdirectory=PythonAPI"
如果下载不下来,或者下载的特别慢,同上面一样使用github镜像,如下:
或:
pip install "git+https://github.com.cnpmjs.org/cocodataset/cocoapi.git#subdirectory=PythonAPI"
注意:
如果你克隆下载的时候出现:
Couldn't find host github.com in the .netrc file; using defaults信息,然后就一直卡着不动了,你就使用github镜像下载
1.4.3 编译mmdetection环境
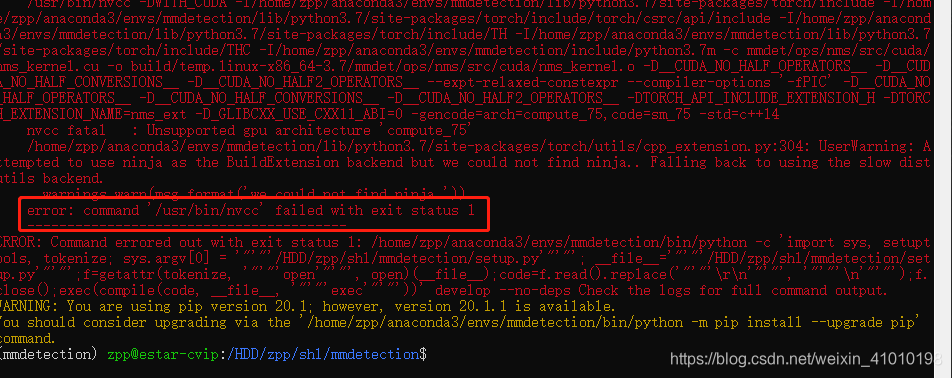
在运行下面的编译命令之前,现在.bashrc把cuda-10.2添加到环境变量中
1、添加环境变量
vi ~/.bashrc
添加内容如下:
export PATH=/usr/local/cuda-10.2/bin${PATH:+:${PATH}}
export LD_LIBRARY_PATH=/usr/local/cuda-10.2/lib64${LD_LIBRARY_PATH:+:${LD_LIBRARY_PATH}}
2、让环境变量生效
source ~/.bashrc
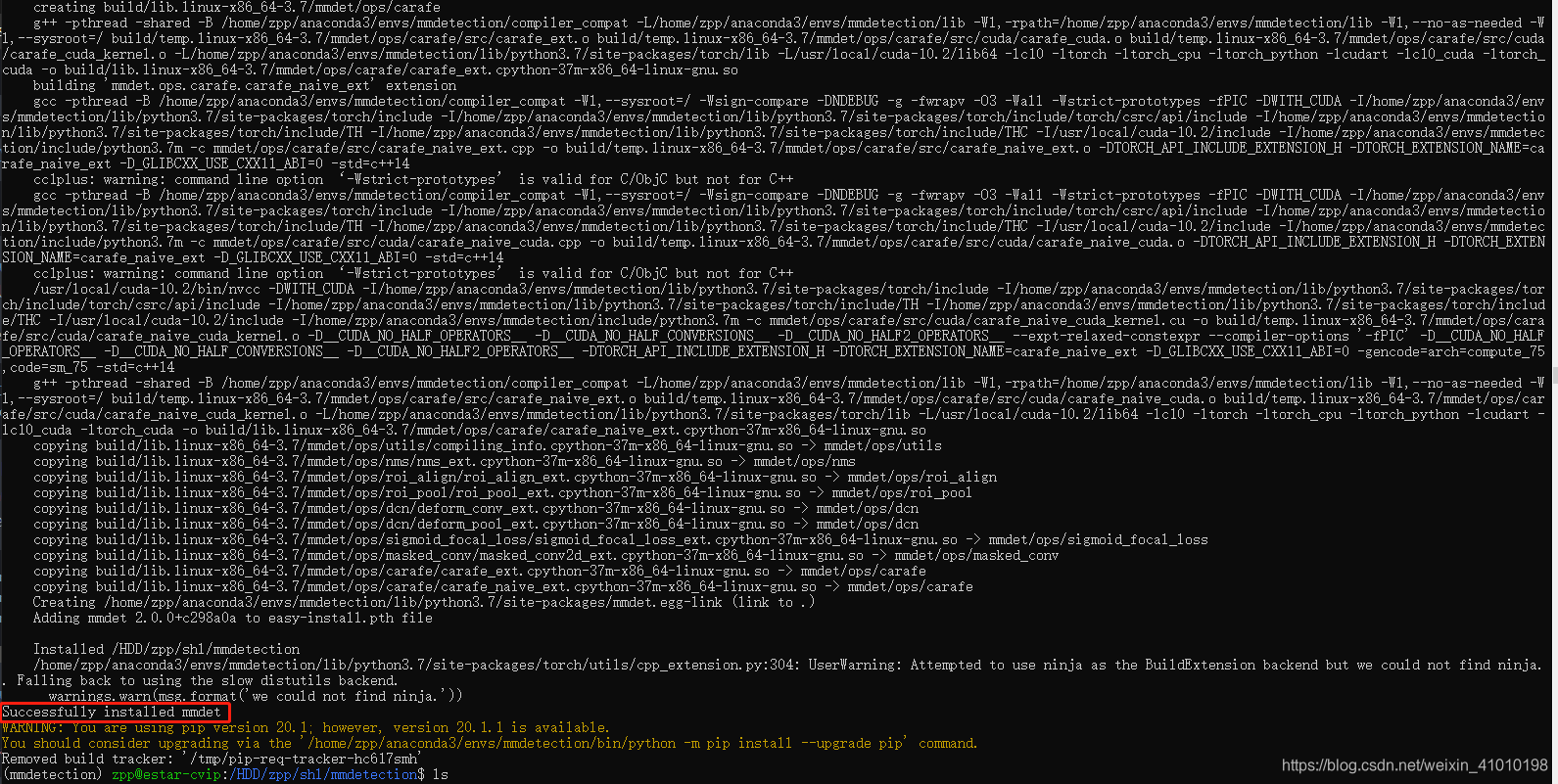
3、编译mmdetection
python setup.py develop或pip install -v -e .
正确编译的结果如下:
注意1:
如果你在编译的过程如下报错:error: command 'usr/bin/nvcc' failed with exit status 1,记得按照是上面的方式添加把cuda添加到环境变量中即可
注意2:
如果后面你在执行训练或测试命令时,报错:ModuleNotFoundError: No module named 'mmdet',这也是由于没有正确编译导致的错误。
注意3:
最好使用python setup.py develop进行编译,我使用pip install -v -e . 进行编译的时候,包mmcv版本错误!
2 准备自己的数据集
2.1 数据标注
数据标注工具使用LabelImg,然后把所有的数据都标注成VOC数据格式,关于如何LabelImg工具如何使用,请参考我的博客:LabelImg教程详细使用
- 所有的数据图片放在:JPEGImage文件夹
- 所有的数据图片的标签文件放在:Annotation文件夹
2.2 数据划分与存放
2.2.1 VOC2007数据集说明
VOC数据集共包含:训练集(5011幅),测试集(4952幅),共计9963幅图,共包含20个种类。
| 类别 | 训练数量 | 测试集数量 |
|---|---|---|
| aeroplane | 238 | 204 |
| bicycle | 243 | 239 |
| bird | 330 | 282 |
| boat | 181 | 172 |
| bottle | 244 | 212 |
| bus | 186 | 174 |
| car | 713 | 721 |
| cat | 337 | 322 |
| chair | 445 | 417 |
| cow | 141 | 127 |
| diningtable | 200 | 190 |
| dog | 421 | 418 |
| horse | 287 | 274 |
| motorbike | 245 | 222 |
| person | 2008 | 2007 |
| pottedplant | 245 | 224 |
| sheep | 96 | 97 |
| sofa | 229 | 223 |
| train | 261 | 259 |
| tvmonitor | 256 | 229 |
更多VOC数据集介绍,可以参考
2.2.2 VOC2007数据集划分与存放
数据集存放在如下机构中:
- 所有的
数据标签存放在:./data/VOCdevkit/VOC2007/Annotations - 所有的
图片数据存放在:./data/VOCdevkit/VOC2007/JPEGImage
./data
└── VOCdevkit
└── VOC2007
├── Annotations # 标注的VOC格式的xml标签文件
├── JPEGImages # 数据集图片
├── ImageSet
│ └── Main
│ ├── test.txt # 划分的测试集
│ ├── train.txt # 划分的训练集
│ ├── trainval.txt
│ └── val.txt # 划分的验证集
├── cal_txt_data_num.py # 用于统计text.txt、train.txt等数据集的个数
└── split_dataset.py # 数据集划分脚本
1、数据集的划分,使用:split_dataset.py脚本
脚本内容:
import os
import random
trainval_percent = 0.8
train_percent = 0.8
xmlfilepath = 'Annotations'
txtsavepath = 'ImageSets\Main'
total_xml = os.listdir(xmlfilepath)
num = len(total_xml)
list = range(num)
tv = int(num * trainval_percent)
tr = int(tv * train_percent)
trainval = random.sample(list, tv)
train = random.sample(trainval, tr)
ftrainval = open('ImageSets/Main/trainval.txt', 'w')
ftest = open('ImageSets/Main/test.txt', 'w')
ftrain = open('ImageSets/Main/train.txt', 'w')
fval = open('ImageSets/Main/val.txt', 'w')
for i in list:
name = total_xml[i][:-4] + '\n'
if i in trainval:
ftrainval.write(name)
if i in train:
ftrain.write(name)
else:
fval.write(name)
else:
ftest.write(name)
ftrainval.close()
ftrain.close()
fval.close()
ftest.close()
执行完该脚本后,会在./data/VOCdevkit/VOC2007/ImageSets/Main目录下,生成四个txt文件:
- train.txt
- trainval.txt
- test.txt
- val.txt
每个txt文件中存储的都是图片的名字(不含图片名字的后缀.jpg),例如:trian.txt中的内容如下:
000005
000007
000016
000019
000020
000021
000024
000046
000052
...
当然你也可以把数据放到其他目录,然后使用软连接的形式连接到./mmdetection/data目录下():
ln -s /HDD/VOCdevkit ./data# 就是把实体目录VOCdevkit做一个链接放到 ./data目录下
2、统计划分数据集数据的个数,使用:cal_txt_data_num.py脚本
脚本内容:
import sys
import os
# 计算txt中有多少个数据,即有多上行
names_txt = os.listdir('./ImageSets/Main')
#print(names_txt)
for name_txt in names_txt:
with open(os.path.join('./ImageSets/Main', name_txt)) as f:
lines = f.readlines()
print(('文件 %s'%name_txt).ljust(35) + ("共有数据:%d个"%len(lines)).ljust(50))
执行结果,如下(显示了我数据集的划分情况):
文件 test.txt 共有数据:1003个
文件 val.txt 共有数据:802个
文件 train.txt 共有数据:3206个
文件 trainval.txt 共有数据:4008个
当然你也可以用coco格式数据集,但是需要把labelImg标注的xml标签转化一下(参考1, 参考2 格式转换)
至此,数据集的准备工作已经全部完成
3 训练自己的数据集
在数据进行训练前,需要先进行一些配置文件的修改工作
3.1 修改配置文件
3.1.1 修改模型配置文件
修改:./mmdetection/configs/faster_rcnn/faster_rcnn_r50_fpn_1x_coco.py
faster_rcnn_r50_fpn_1x_coco.py脚本内容的原始内容
_base_ = [
'../_base_/models/faster_rcnn_r50_fpn.py',
'../_base_/datasets/coco_detection.py',
'../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
]
faster_rcnn_r50_fpn_1x_coco.py脚本内容的修改如下(使用VOC数据格式)
_base_ = [
'../_base_/models/faster_rcnn_r50_fpn.py',
'../_base_/datasets/voc0712.py',
'../_base_/schedules/schedule_1x.py', '../_base_/default_runtime.py'
]
之前是把模型的配置文件,和模型结构都是定义到faster_rcnn_r50_fpn_1x_coco.py这种脚本文件中,最近mmdetection项目代码更新,只不过是做了更好的封装,把这文件进行了拆分,放到了mmdetection/configs/_base_ 目录下,所以要有些内容就要到_base_目录下的文件中进行修改,_base_目录结构如下:
_base_/
├── datasets # 定义数据路径等信息
│ ├── cityscapes_detection.py
│ ├── cityscapes_instance.py
│ ├── coco_detection.py
│ ├── coco_instance.py
│ ├── coco_instance_semantic.py
│ ├── voc0712.py
│ └── wider_face.py
├── default_runtime.py
├── models # 定义模型的配置信息
│ ├── cascade_mask_rcnn_r50_fpn.py
│ ├── cascade_rcnn_r50_fpn.py
│ ├── faster_rcnn_r50_caffe_c4.py
│ ├── faster_rcnn_r50_fpn.py
│ ├── fast_rcnn_r50_fpn.py
│ ├── mask_rcnn_r50_caffe_c4.py
│ ├── mask_rcnn_r50_fpn.py
│ ├── retinanet_r50_fpn.py
│ ├── rpn_r50_caffe_c4.py
│ ├── rpn_r50_fpn.py
│ └── ssd300.py
└── schedules # 定义训练策略信息
├── schedule_1x.py
├── schedule_20e.py
└── schedule_2x.py
../_base_/models/faster_rcnn_r50_fpn.py:定义模型文件
如果你想使用../_base_/datasets/coco_detection.py:定义训练数据路径等../_base_/schedules/schedule_1x.py:定义学习策略,例如leaning_rate、epoch等../_base_/default_runtime.py:定义一些日志等其他信息
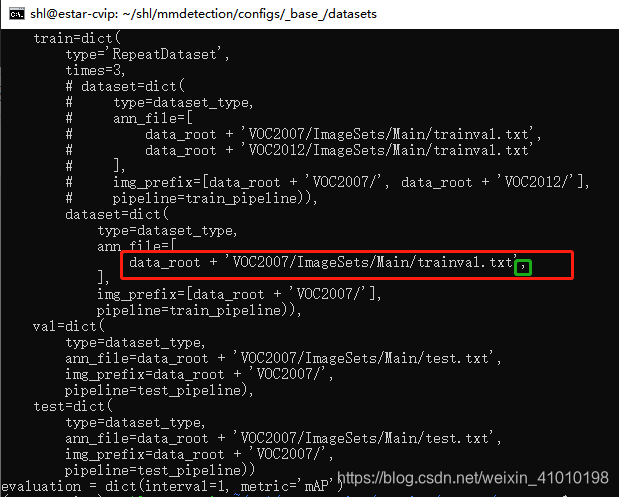
3.1.2 修改训练数据的配置文件
修改:./mmdetection/configs/_base_/datasets/voc712.py
因为我们使用的是VOC2007数据,因此只要把其中含有VOC2012路径注释即可,修改后的内容如下:
# dataset settings
dataset_type = 'VOCDataset'
data_root = 'data/VOCdevkit/'
img_norm_cfg = dict(
mean=[123.675, 116.28, 103.53], std=[58.395, 57.12, 57.375], to_rgb=True)
train_pipeline = [
dict(type='LoadImageFromFile'),
dict(type='LoadAnnotations', with_bbox=True),
dict(type='Resize', img_scale=(1000, 600), keep_ratio=True),
dict(type='RandomFlip', flip_ratio=0.5),
dict(type='Normalize', **img_norm_cfg),
dict(type='Pad', size_divisor=32),
dict(type='DefaultFormatBundle'),
dict(type='Collect', keys=['img', 'gt_bboxes', 'gt_labels']),
]
test_pipeline = [
dict(type='LoadImageFromFile'),
dict(
type='MultiScaleFlipAug',
img_scale=(1000, 600),
flip=False,
transforms=[
dict(type='Resize', keep_ratio=True),
dict(type='RandomFlip'),
dict(type='Normalize', **img_norm_cfg),
dict(type='Pad', size_divisor=32),
dict(type='ImageToTensor', keys=['img']),
dict(type='Collect', keys=['img']),
])
]
data = dict(
samples_per_gpu=2,
workers_per_gpu=2,
train=dict(
type='RepeatDataset',
times=3,
# dataset=dict(
# type=dataset_type,
# ann_file=[
# data_root + 'VOC2007/ImageSets/Main/trainval.txt',
# data_root + 'VOC2012/ImageSets/Main/trainval.txt'
# ],
# img_prefix=[data_root + 'VOC2007/', data_root + 'VOC2012/'],
# pipeline=train_pipeline)),
# 把含有VOC2012的路径去掉
dataset=dict(
type=dataset_type,
ann_file=[
data_root + 'VOC2007/ImageSets/Main/trainval.txt',
],
img_prefix=[data_root + 'VOC2007/'],
pipeline=train_pipeline)),
val=dict(
type=dataset_type,
ann_file=data_root + 'VOC2007/ImageSets/Main/test.txt',
img_prefix=data_root + 'VOC2007/',
pipeline=test_pipeline),
test=dict(
type=dataset_type,
ann_file=data_root + 'VOC2007/ImageSets/Main/test.txt',
img_prefix=data_root + 'VOC2007/',
pipeline=test_pipeline))
evaluation = dict(interval=1, metric='mAP')
3.1.3 修改模型文件中的类别个数
修改:./mmdetection/configs/_base_/models/faster_rcnn_r50_fpn.py
因为这里使用的是VOC2007数据集,一共有20个类别,因此这里把``faster_rcnn_r50_fpn.py第46行的num_classes`的值改为20,根据自己的分类的个数,有多少类就改成多少,修改完如下所示:
model = dict(
type='FasterRCNN',
pretrained='torchvision://resnet50',
backbone=dict(
type='ResNet',
depth=50,
num_stages=4,
out_indices=(0, 1, 2, 3),
frozen_stages=1,
norm_cfg=dict(type='BN', requires_grad=True),
norm_eval=True,
style='pytorch'),
neck=dict(
type='FPN',
in_channels=[256, 512, 1024, 2048],
out_channels=256,
num_outs=5),
rpn_head=dict(
type='RPNHead',
in_channels=256,
feat_channels=256,
anchor_generator=dict(
type='AnchorGenerator',
scales=[8],
ratios=[0.5, 1.0, 2.0],
strides=[4, 8, 16, 32, 64]),
bbox_coder=dict(
type='DeltaXYWHBBoxCoder',
target_means=[.0, .0, .0, .0],
target_stds=[1.0, 1.0, 1.0, 1.0]),
loss_cls=dict(
type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.0),
loss_bbox=dict(type='L1Loss', loss_weight=1.0)),
roi_head=dict(
type='StandardRoIHead',
bbox_roi_extractor=dict(
type='SingleRoIExtractor',
roi_layer=dict(type='RoIAlign', out_size=7, sample_num=0),
out_channels=256,
featmap_strides=[4, 8, 16, 32]),
bbox_head=dict(
type='Shared2FCBBoxHead',
in_channels=256,
fc_out_channels=1024,
roi_feat_size=7,
num_classes=20, # 把类别个数改成自己数据集的类别,如果是voc2007数据集就改成20
bbox_coder=dict(
type='DeltaXYWHBBoxCoder',
target_means=[0., 0., 0., 0.],
target_stds=[0.1, 0.1, 0.2, 0.2]),
reg_class_agnostic=False,
loss_cls=dict(
type='CrossEntropyLoss', use_sigmoid=False, loss_weight=1.0),
loss_bbox=dict(type='L1Loss', loss_weight=1.0))))
# model training and testing settings
train_cfg = dict(
rpn=dict(
assigner=dict(
type='MaxIoUAssigner',
pos_iou_thr=0.7,
neg_iou_thr=0.3,
min_pos_iou=0.3,
match_low_quality=True,
ignore_iof_thr=-1),
sampler=dict(
type='RandomSampler',
num=256,
pos_fraction=0.5,
neg_pos_ub=-1,
add_gt_as_proposals=False),
allowed_border=-1,
pos_weight=-1,
debug=False),
rpn_proposal=dict(
nms_across_levels=False,
nms_pre=2000,
nms_post=1000,
max_num=1000,
nms_thr=0.7,
min_bbox_size=0),
rcnn=dict(
assigner=dict(
type='MaxIoUAssigner',
pos_iou_thr=0.5,
neg_iou_thr=0.5,
min_pos_iou=0.5,
match_low_quality=False,
ignore_iof_thr=-1),
sampler=dict(
type='RandomSampler',
num=512,
pos_fraction=0.25,
neg_pos_ub=-1,
add_gt_as_proposals=True),
pos_weight=-1,
debug=False))
test_cfg = dict(
rpn=dict(
nms_across_levels=False,
nms_pre=1000,
nms_post=1000,
max_num=1000,
nms_thr=0.7,
min_bbox_size=0),
rcnn=dict(
score_thr=0.05, nms=dict(type='nms', iou_thr=0.5), max_per_img=100)
# soft-nms is also supported for rcnn testing
# e.g., nms=dict(type='soft_nms', iou_thr=0.5, min_score=0.05)
)
注意:
之前的代码版本是,
num_classes改成类别+1,也就把背景也算作一类,在mmdetection V2.0.0版本,背景不在作为一类,因此不用再加1,有多少个类别就写多少
3.1.4 修改测试时的标签类别文件
修改:./mmdetection/mmdet/core/evaluation/class_names.py
修改mmdetection/mmdet/core/evaluation/class_names.py下的class_names.py中的voc_classes,将 其改为要训练的数据集的类别名称。如果不改的话,最后测试的结果的名称还会是’aeroplane’, ‘bicycle’, ‘bird’, ‘boat’,…这些。因为我使用的是voc2007因此可以不做改动,你可以根据自己的类别进行修改:
def voc_classes():
return [
'aeroplane', 'bicycle', 'bird', 'boat', 'bottle', 'bus', 'car', 'cat',
'chair', 'cow', 'diningtable', 'dog', 'horse', 'motorbike', 'person',
'pottedplant', 'sheep', 'sofa', 'train', 'tvmonitor'
]
注意:
如果只有一个类别,需要加上一个逗号,否则将会报错,例如只有一个类别,如下:
def voc_classes():
return ['aeroplane', ]
3.1.5 修改voc.py文件
修改:mmdetection/mmdet/datasets/voc.py
修改mmdetection/mmdet/datasets/voc.py下的voc.py中的CLASSES,将 其改为要训练的数据集的类别名称。如果不改的话,最后测试的结果的名称还会是’aeroplane’, ‘bicycle’, ‘bird’, ‘boat’,…这些。因为我使用的是voc2007因此可以不做改动,你可以根据自己的类别进行修改:
class VOCDataset(XMLDataset):
CLASSES = ('aeroplane', 'bicycle', 'bird', 'boat', 'bottle', 'bus', 'car',
'cat', 'chair', 'cow', 'diningtable', 'dog', 'horse',
'motorbike', 'person', 'pottedplant', 'sheep', 'sofa', 'train',
'tvmonitor')
注意:
如果只有一个类别,需要加上一个逗号,否则将会报错,例如只有一个类别,如下:
class VOCDataset(XMLDataset):
CLASSES = ('aeroplane', )
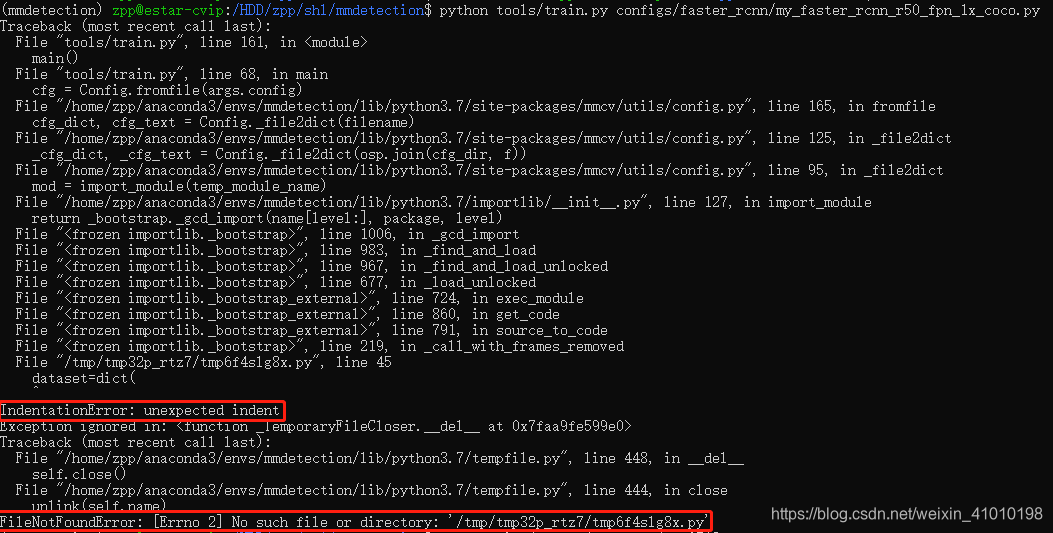
提示错误:
1、IndentationError: unexpected indent
2、FileNotFoundError: [Errno 2] No such file or directory: '/tmp/tmp32p_rtz7/tmp6f4slg8x.py'
从上面看提示了两个错误,我一开始关注的是第二个错误,然后就没有找到错误的原因,后面看到上面还有一个错误:IndentationError: unexpected indent,这种错误一般是由于空格和Tab空格混用导致的,看错误上面的dataset=dict(可以定位到这个错误的位置,然后进行修改。
因此建议,在vi编辑器中全部使用空格键进行缩进,最好是在编辑器中,例如Pycharm中改好在再替换,一般不会出现这种错误。
到此为止,环境的搭建、数据的准备、配置文件的修改已经全部准备完毕,下面就让我们开始训练吧
3.2 开始训练模型
3.2.1 快速开始训练
1、训练命令:
python python tools/train.py ./configs/faster_rcnn/faster_rcnn_r50_fpn_1x_coco.py
我是在VOC2007数据集上,2080Ti(11G显存,实际使用显存大概4G)的显卡上训练12epoch,训练时间3个小时
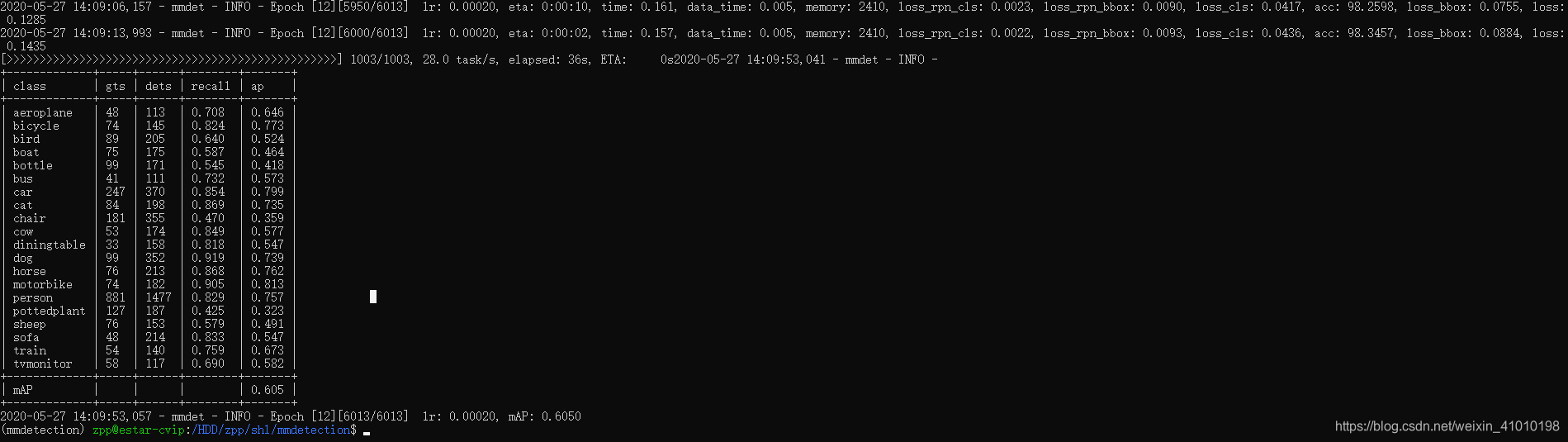
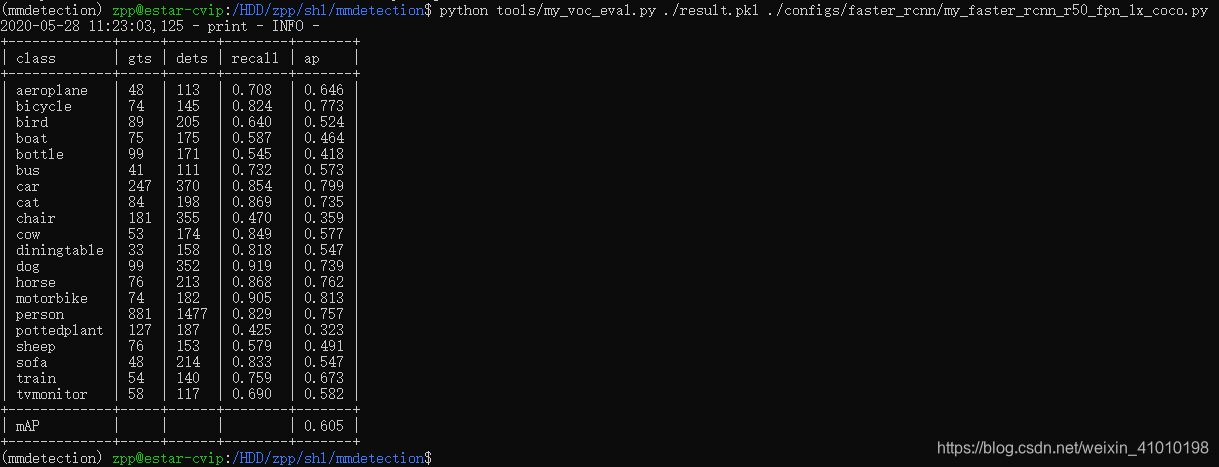
结果信息:
+-------------+-----+------+--------+-------+
| class | gts | dets | recall | ap |
+-------------+-----+------+--------+-------+
| aeroplane | 48 | 113 | 0.708 | 0.646 |
| bicycle | 74 | 145 | 0.824 | 0.773 |
| bird | 89 | 205 | 0.640 | 0.524 |
| boat | 75 | 175 | 0.587 | 0.464 |
| bottle | 99 | 171 | 0.545 | 0.418 |
| bus | 41 | 111 | 0.732 | 0.573 |
| car | 247 | 370 | 0.854 | 0.799 |
| cat | 84 | 198 | 0.869 | 0.735 |
| chair | 181 | 355 | 0.470 | 0.359 |
| cow | 53 | 174 | 0.849 | 0.577 |
| diningtable | 33 | 158 | 0.818 | 0.547 |
| dog | 99 | 352 | 0.919 | 0.739 |
| horse | 76 | 213 | 0.868 | 0.762 |
| motorbike | 74 | 182 | 0.905 | 0.813 |
| person | 881 | 1477 | 0.829 | 0.757 |
| pottedplant | 127 | 187 | 0.425 | 0.323 |
| sheep | 76 | 153 | 0.579 | 0.491 |
| sofa | 48 | 214 | 0.833 | 0.547 |
| train | 54 | 140 | 0.759 | 0.673 |
| tvmonitor | 58 | 117 | 0.690 | 0.582 |
+-------------+-----+------+--------+-------+
| mAP | | | | 0.605 |
+-------------+-----+------+--------+-------+
2020-05-27 14:09:53,057 - mmdet - INFO - Epoch [12][6013/6013] lr: 0.00020, mAP: 0.6050
2、训练完成在工作目录下生成模型文件和日志文件
训练完成之后,训练的模型文件和日志文件等会被保存在./mmdetection/work_dir目录下(work_dir目录不指定会自动创建,也可以用参数--work-dir自己指定):
work_dirs/
└── faster_rcnn_r50_fpn_1x_coco
├── 20200527_105051.log
├── 20200527_105051.log.json
├── epoch_10.pth
├── epoch_11.pth
├── epoch_12.pth
├── epoch_1.pth
├── epoch_2.pth
├── epoch_3.pth
├── epoch_4.pth
├── epoch_5.pth
├── epoch_6.pth
├── epoch_7.pth
├── epoch_8.pth
├── epoch_9.pth
├── latest.pth -> epoch_12.pth
└── faster_rcnn_r50_fpn_1x_coco.py # 把之前的列表中的三个文件的代码都写到这个文件中
从上面生成的文件可以看出:每训练完一轮都会保存一个epoch_x.pth模型,最新的也是最终的模型会被保存为latest.pth,同时会生成两个日志文件:
- 20200527_105051.log 日志内容就是训练时输出的信息:
- 20200527_105051.log.json 日志内容是训练过程中的损失、学习率、精度等信息,主要是为了数据可视化展示,方便调试:

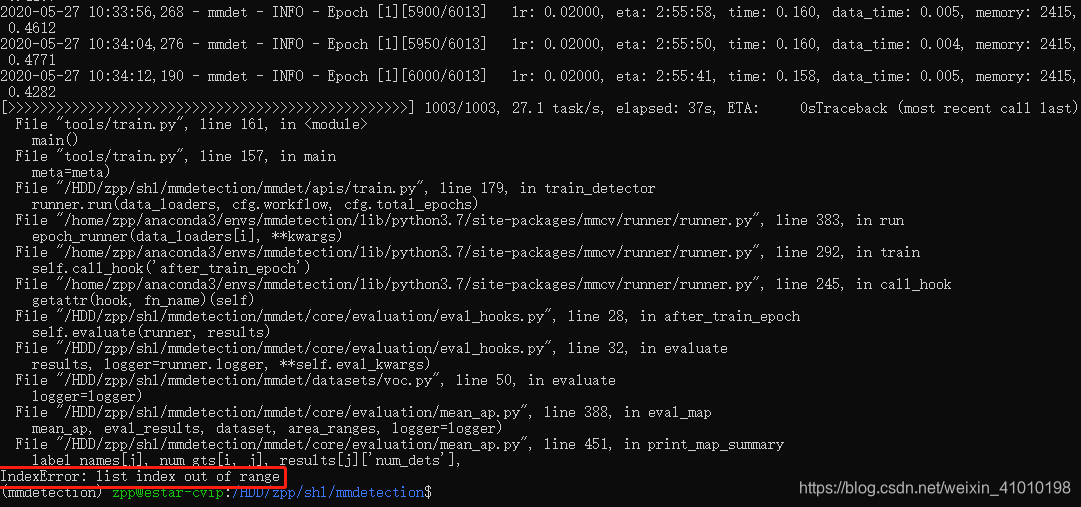
注意1:
在训练的过程中程序终止,报错:IndexError: list index out of range
,这个错误是由于类别(num_classes)没有修改导致的,同时类别的修改也发生变化,现在的类别已经不包括背景(background)
注意2:
这次我使用的是自己的数据集进行训练,一共两类:
- hard_hat
- other
训练的时候没有报错,但是出现异常,所有的训练损失都变成了0,每一轮的label也不是自己设置的label,而变成了VOC的label,这个问题是因为少了一个逗号,我也不知道为什么会因为一个逗号而引发一场血案:在/mmdetection/configs/_base_/datasets/voc0712.py中的'VOC2007/ImageSets/Main/trainval.txt'后的逗号一定要加上,否则会报同样的错误。
异常信息:
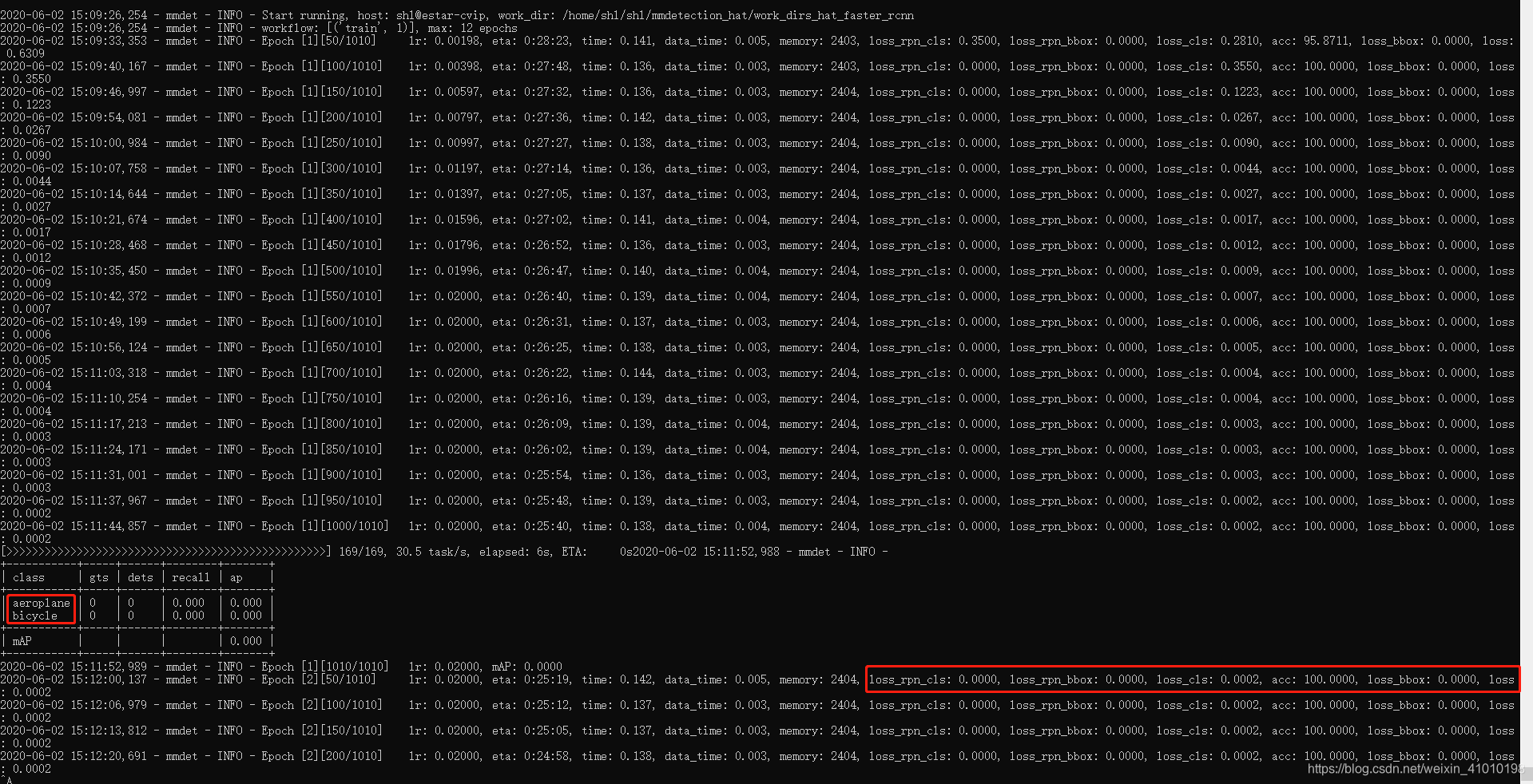
问题解决: 把后面的逗号补上
dataset=dict(
type=dataset_type,
ann_file=[
data_root + 'VOC2007/ImageSets/Main/trainval.txt', ],
img_prefix=[data_root + 'VOC2007/'],
3.2.2 训练命令中的指定参数
训练命令:
python python tools/train.py ./configs/faster_rcnn/faster_rcnn_r50_fpn_1x_coco.py
--work-dir:指定训练保存模型和日志的路径--resume-from:从预训练模型chenkpoint中恢复训练--no-validate:训练期间不评估checkpoint--gpus:指定训练使用GPU的数量(仅适用非分布式训练)--gpu-ids: 指定使用哪一块GPU(仅适用非分布式训练)--seed:随机种子--deterministic:是否为CUDNN后端设置确定性选项--options: arguments in dict--launcher: {none,pytorch,slurm,mpi} job launcher--local_rank: LOCAL_RANK--autoscale-lr: automatically scale lr with the number of gpus
加其他参数的训练命令:
1、自己指定模型保存路径
python python tools/train.py ./configs/faster_rcnn/faster_rcnn_r50_fpn_1x_coco.py --work-dir my_faster
2、指定GPU数量
python python tools/train.py ./configs/faster_rcnn/faster_rcnn_r50_fpn_1x_coco.py --gpus 1 --no-validate --work-dir my_faster
3.3 在自己的预训练模型上进行测试
3.3.1 测试命令1,使用测试脚本test.py
测试命令
tools/test.py configs/faster_rcnn/faster_rcnn_r50_fpn_1x_coco.py ./work_dirs/my_faster_rcnn_r50_fpn_1x_coco/latest.pth --out ./result.pkl
configs/faster_rcnn/faster_rcnn_r50_fpn_1x_coco.py:是模型文件./work_dirs/my_faster_rcnn_r50_fpn_1x_coco/latest.pth:是我们自己训练保存的模型./result.pkl:生成一个result.pkl文件,大小1.2M,该文件中会保存各个类别对应的信息,用于计算AP
如下是我测试的结果显示(test.txt 测试集图片有1003张):
(mmdetection) zpp@estar-cvip:/HDD/zpp/shl/mmdetection$ python tools/test.py configs/faster_rcnn/my_faster_rcnn_r50_fpn_1x_coco.py ./work_dirs/my_faster_rcnn_r50_fpn_1x_coco/latest.pth --out ./result.pkl
[>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>] 1003/1003, 7.5 task/s, elapsed: 134s, ETA: 0s
writing results to ./result.pkl
测试的其他参数:
MMDet test (and eval) a model
positional arguments:
config test config file path
checkpoint checkpoint file
optional arguments:
-h, --help show this help message and exit
--out OUT output result file in pickle format
--fuse-conv-bn Whether to fuse conv and bn, this will slightly
increasethe inference speed
--format-only Format the output results without perform evaluation.
It isuseful when you want to format the result to a
specific format and submit it to the test server
--eval EVAL [EVAL ...]
evaluation metrics, which depends on the dataset,
e.g., "bbox", "segm", "proposal" for COCO, and "mAP",
"recall" for PASCAL VOC
--show show results
--show-dir SHOW_DIR directory where painted images will be saved
--show-score-thr SHOW_SCORE_THR
score threshold (default: 0.3)
--gpu-collect whether to use gpu to collect results.
--tmpdir TMPDIR tmp directory used for collecting results from
multiple workers, available when gpu-collect is not
specified
--options OPTIONS [OPTIONS ...]
arguments in dict
--launcher {none,pytorch,slurm,mpi}
job launcher
--local_rank LOCAL_RANK
使用--show-dir 参数,可以把测试的检测图片检测结果保存到指定文件夹中,如下命令:
python tools/test.py ./configs/faster_rcnn/faster_rcnn_r50_fpn_1x_coco.py ./work_dirs_hat_faster_rcnn/latest.pth --out ./result.pkl --show-dir test_hat_result
生成的测试结果图片会被保存到test_hat_result/JPEGImages文件夹下,部分测试结果如下:

3.3.2 测试命令2,使用测试脚本test_robustness.py
测试命令:
python tools/test_robustness.py ./configs/faster_rcnn/faster_rcnn_r50_fpn_1x_coco.py ./work_dirs/faster_rcnn_r50_fpn_1x_coco/latest.pth --out ./result2.pkl
如下是我测试的结果显示(test.txt 测试集图片有1003张):
(mmdetection) zpp@estar-cvip:/HDD/zpp/shl/mmdetection$ python tools/test_robustness.py ./configs/faster_rcnn/my_faster_rcnn_r50_fpn_1x_coco.py ./work_dirs/my_faster_rcnn_r50_fpn_1x_coco/latest.pth --out ./result2.pkl
Testing gaussian_noise at severity 0
[>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>] 1003/1003, 7.6 task/s, elapsed: 132s, ETA: 0s
Testing gaussian_noise at severity 1
[>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>] 1003/1003, 7.6 task/s, elapsed: 132s, ETA: 0s
test_robustness.py有很多其他的参数,如下:
positional arguments:
config test config file path
checkpoint checkpoint file
optional arguments:
-h, --help show this help message and exit
--out OUT output result file
--corruptions {all,benchmark,noise,blur,weather,digital,holdout,None,gaussian_noise,shot_noise,impulse_noise,defocus_blur,glass_blur,motion_blur,zoom_blur,snow,frost,fog,brightness,contrast,elastic_transform,pixelate,jpeg_compression,speckle_noise,gaussian_blur,spatter,saturate} [{all,benchmark,noise,blur,weather,digital,holdout,None,gaussian_noise,shot_noise,impulse_noise,defocus_blur,glass_blur,motion_blur,zoom_blur,snow,frost,fog,brightness,contrast,elastic_transform,pixelate,jpeg_compression,speckle_noise,gaussian_blur,spatter,saturate} ...]
corruptions
--severities SEVERITIES [SEVERITIES ...]
corruption severity levels
--eval {proposal,proposal_fast,bbox,segm,keypoints} [{proposal,proposal_fast,bbox,segm,keypoints} ...]
eval types
--iou-thr IOU_THR IoU threshold for pascal voc evaluation
--summaries SUMMARIES
Print summaries for every corruption and severity
--workers WORKERS workers per gpu
--show show results
--tmpdir TMPDIR tmp dir for writing some results
--seed SEED random seed
--launcher {none,pytorch,slurm,mpi}
job launcher
--local_rank LOCAL_RANK
--final-prints {P,mPC,rPC} [{P,mPC,rPC} ...]
corruption benchmark metric to print at the end
--final-prints-aggregate {all,benchmark}
aggregate all results or only those for benchmark
corruptions
3.3.3 计算类别的AP
之前计算AP的命令为(参考):python tools/voc_eval.py results.pkl ./configs/faster_rcnn/faster_rcnn_r50_fpn_1x_coco.py,在mmdetection v1.0.0的版本中还有voc_eval.py这个测试脚本,但是在mmdetection v2.0.0已经取消这个脚本,然后集成都了robustness_eval.py这个脚本中
1、新的计算AP脚本
因此,使用robustness_eval.py脚本计算AP的命令如下:
python tools/robustness_eval.py ./result.pkl --dataset voc --metric AP
2、继续使用之前的脚本计算AP
此时你可以在./tools下新建一个my_voc_eval.py脚本,脚本如下:
'''
项目名称:计算AP
创建时间:20200528
'''
__Author__ = "Shliang"
__Email__ = "[email protected]"
from argparse import ArgumentParser
import mmcv
from mmdet import datasets
from mmdet.core import eval_map
def voc_eval(result_file, dataset, iou_thr=0.5, nproc=4):
det_results = mmcv.load(result_file)
annotations = [dataset.get_ann_info(i) for i in range(len(dataset))]
if hasattr(dataset, 'year') and dataset.year == 2007:
dataset_name = 'voc07'
else:
dataset_name = dataset.CLASSES
eval_map(
det_results,
annotations,
scale_ranges=None,
iou_thr=iou_thr,
dataset=dataset_name,
logger='print',
nproc=nproc)
def main():
parser = ArgumentParser(description='VOC Evaluation')
parser.add_argument('result', help='result file path')
parser.add_argument('config', help='config file path')
parser.add_argument(
'--iou-thr',
type=float,
default=0.5,
help='IoU threshold for evaluation')
parser.add_argument(
'--nproc',
type=int,
default=4,
help='Processes to be used for computing mAP')
args = parser.parse_args()
cfg = mmcv.Config.fromfile(args.config)
test_dataset = mmcv.runner.obj_from_dict(cfg.data.test, datasets)
voc_eval(args.result, test_dataset, args.iou_thr, args.nproc)
if __name__ == '__main__':
main()
输入计算AP的命令:
python tools/my_voc_eval.py ./result.pkl ./configs/faster_rcnn/faster_rcnn_r50_fpn_1x_coco.py
运行结果:
3.4 用自己训练的模型在图片和视频上做测试
3.4.1 用自己训练的模型在图片上做测试
测试的脚本为:./mmdetection/demo/image_demo.py
from argparse import ArgumentParser
from mmdet.apis import inference_detector, init_detector, show_result_pyplot
def main():
parser = ArgumentParser()
parser.add_argument('img', help='Image file')
parser.add_argument('config', help='Config file')
parser.add_argument('checkpoint', help='Checkpoint file')
parser.add_argument(
'--device', default='cuda:0', help='Device used for inference')
parser.add_argument(
'--score-thr', type=float, default=0.3, help='bbox score threshold')
args = parser.parse_args()
# build the model from a config file and a checkpoint file
model = init_detector(args.config, args.checkpoint, device=args.device)
# test a single image
result = inference_detector(model, args.img)
# show the results
show_result_pyplot(model, args.img, result, score_thr=args.score_thr)
if __name__ == '__main__':
main()
然后在命令行中输入命令进行测试:
python image_demo.py ../test.jpg ../configs/faster_rcnn/faster_rcnn_r50_fpn_1x_coco.py ../work_dirs/faster_rcnn_r50_fpn_1x_coco/latest.pth
原图:

测试结果图:
3.4.2 用自己训练的模型在视频上做测试
参考1: # 内容比较详细
参考2:https://blog.csdn.net/syysyf99/article/details/96574325
参考3:https://blog.csdn.net/weicao1990/article/details/93484603


♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠ ⊕ ♠