数字图像处理——中值滤波器【像素级别处理】(python)
简介
中值滤波(统计排序滤波器)是一种非线性数字滤波器技术,经常用于去除图像或者其它信号中的噪声。这个设计思想就是检查输入信号中的采样并判断它是否代表了信号,使用奇数个采样组成的观察窗实现这项功能。观察窗口中的数值进行排序,位于观察窗中间的中值作为输出。然后,丢弃最早的值,取得新的采样,重复上面的计算过程。
其中中值滤波对椒盐噪声处理非常好
代码实现
输入:
import cv2
import datetime
import numpy as np
import matplotlib.pyplot as plt
img = cv2.imread('Fig0335.tif') # 测试图片
H = img.shape[0]
W = img.shape[1]
img3 = np.zeros((H, W, 3), np.uint8) # 3*3邻域平滑后的图像
imgmid = np.zeros((H, W, 3), np.uint8) # 3*3邻域内取中值的图像
tmpImg = np.zeros((H + 2, W + 2, 3), np.uint8) # 扩充之后的图像
for i in range(H):
for j in range(W):
tmpImg[i + 1, j + 1] = img[i, j]
starttime = datetime.datetime.now()
for i in range(H):
for j in range(W):
S = []
for x in range(3):
for y in range(3):
# S[x * 3 + y] = tmpImg[i + x, j + y, 0]
S.append(tmpImg[i + x, j + y, 0])
img3[i, j, 0] = sum(S) // 9
img3[i, j, 1] = img3[i, j, 0]
img3[i, j, 2] = img3[i, j, 0]
# 冒泡排序,只要排到中间一个值,即4,因此x范围是8->3
# for x in range(8, 3, -1):
# for y in range(x):
# if S[y + 1] > S[y]:
# temp = S[y]
# S[y] = S[y + 1]
# S[y + 1] = temp
# 自带的排序,timesort,经过测试,这个比冒泡排序要快60%
S.sort()
print(S)
imgmid[i, j, 0] = S[4]
imgmid[i, j, 1] = imgmid[i, j, 0]
imgmid[i, j, 2] = imgmid[i, j, 0]
endtime = datetime.datetime.now()
print(endtime - starttime)
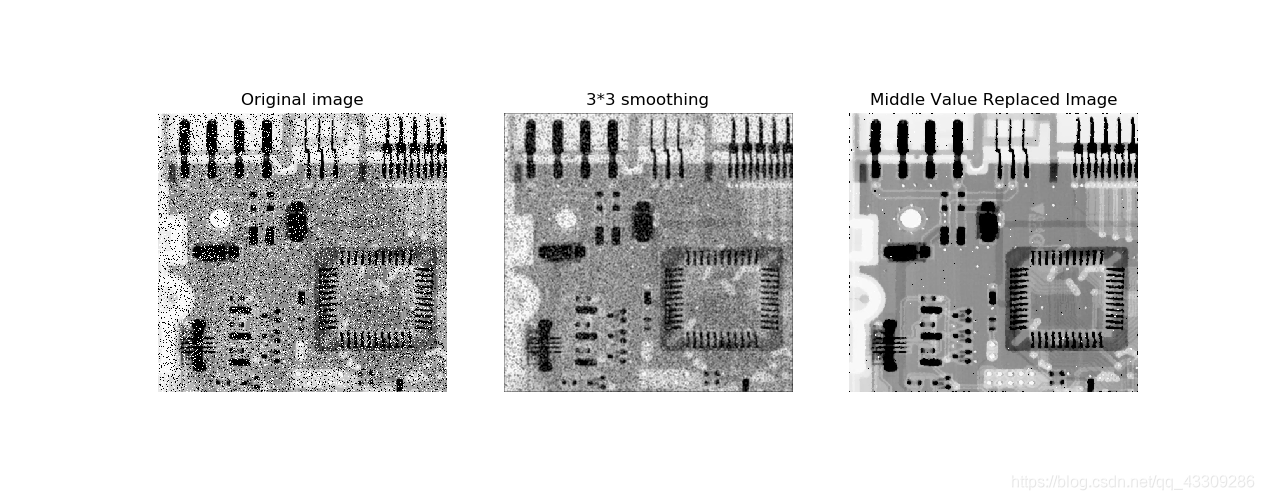
# 原图
plt.subplot(1, 3, 1)
plt.axis('off')
plt.title('Original image')
plt.imshow(img)
# 3*3邻域
plt.subplot(1, 3, 2)
plt.axis('off')
plt.title('3*3 smoothing')
plt.imshow(img3)
# 邻域中值替换之后
plt.subplot(1, 3, 3)
plt.axis('off')
plt.title('Middle Value Replaced Image')
plt.imshow(imgmid)
plt.show()
输出:
import cv2
import datetime
import numpy as np
import matplotlib.pyplot as plt
img = cv2.imread('Fig0335.tif') # 测试图片
H = img.shape[0]
W = img.shape[1]
img3 = np.zeros((H, W, 3), np.uint8) # 3*3邻域平滑后的图像
imgmid = np.zeros((H, W, 3), np.uint8) # 3*3邻域内取中值的图像
imgmid5 = np.zeros((H, W, 3), np.uint8)
tmpImg = np.zeros((H + 2, W + 2, 3), np.uint8) # 扩充之后的图像
tmpImg5 = np.zeros((H + 4, W + 4, 3), np.uint8)
for i in range(H):
for j in range(W):
tmpImg[i + 1, j + 1] = img[i, j]
tmpImg5[i + 2, j + 2] = img[i, j]
starttime = datetime.datetime.now()
for i in range(H):
for j in range(W):
S = []
T = []
for x in range(3):
for y in range(3):
# S[x * 3 + y] = tmpImg[i + x, j + y, 0]
S.append(tmpImg[i + x, j + y, 0])
# img3[i, j, 0] = sum(S) // 9
# img3[i, j, 1] = img3[i, j, 0]
# img3[i, j, 2] = img3[i, j, 0]
# 冒泡排序,只要排到中间一个值,即4,因此x范围是8->3
# for x in range(8, 3, -1):
# for y in range(x):
# if S[y + 1] > S[y]:
# temp = S[y]
# S[y] = S[y + 1]
# S[y + 1] = temp
# 自带的排序,timesort,经过测试,这个比冒泡排序要快60%
S.sort()
print(S)
imgmid[i, j, 0] = S[4]
imgmid[i, j, 1] = imgmid[i, j, 0]
imgmid[i, j, 2] = imgmid[i, j, 0]
for x in range(5):
for y in range(5):
T.append(tmpImg5[i + x, j + y, 0])
T.sort()
imgmid5[i, j, 0] = T[12]
imgmid5[i, j, 1] = T[12]
imgmid5[i, j, 2] = T[12]
endtime = datetime.datetime.now()
print(endtime - starttime)
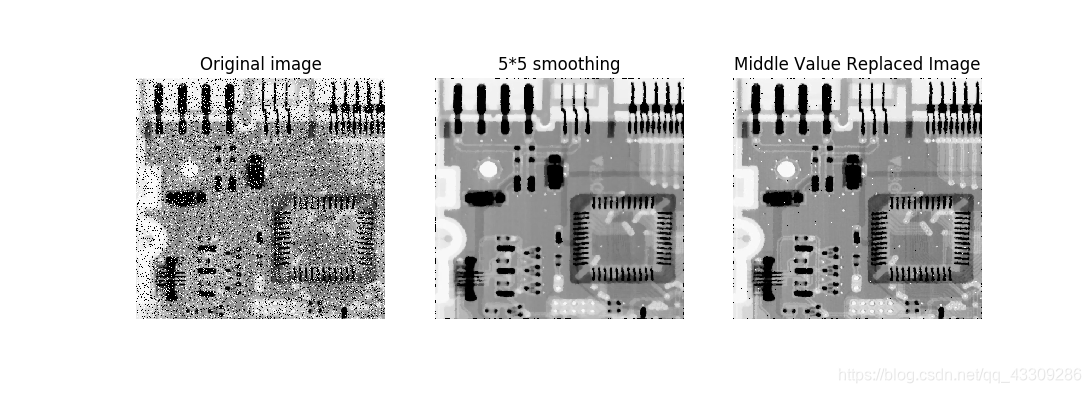
# 原图
plt.subplot(1, 3, 1)
plt.axis('off')
plt.title('Original image')
plt.imshow(img)
# 3*3邻域
plt.subplot(1, 3, 2)
plt.axis('off')
plt.title('5*5 smoothing')
plt.imshow(imgmid5)
# 邻域中值替换之后
plt.subplot(1, 3, 3)
plt.axis('off')
plt.title('Middle Value Replaced Image')
plt.imshow(imgmid)
plt.show()