原理及python实现
graph:保存图,类似邻接表
costs:保存从起点到某点的最小花费
parents:保存节点的父节点
processed:用于保存已经处理过的点
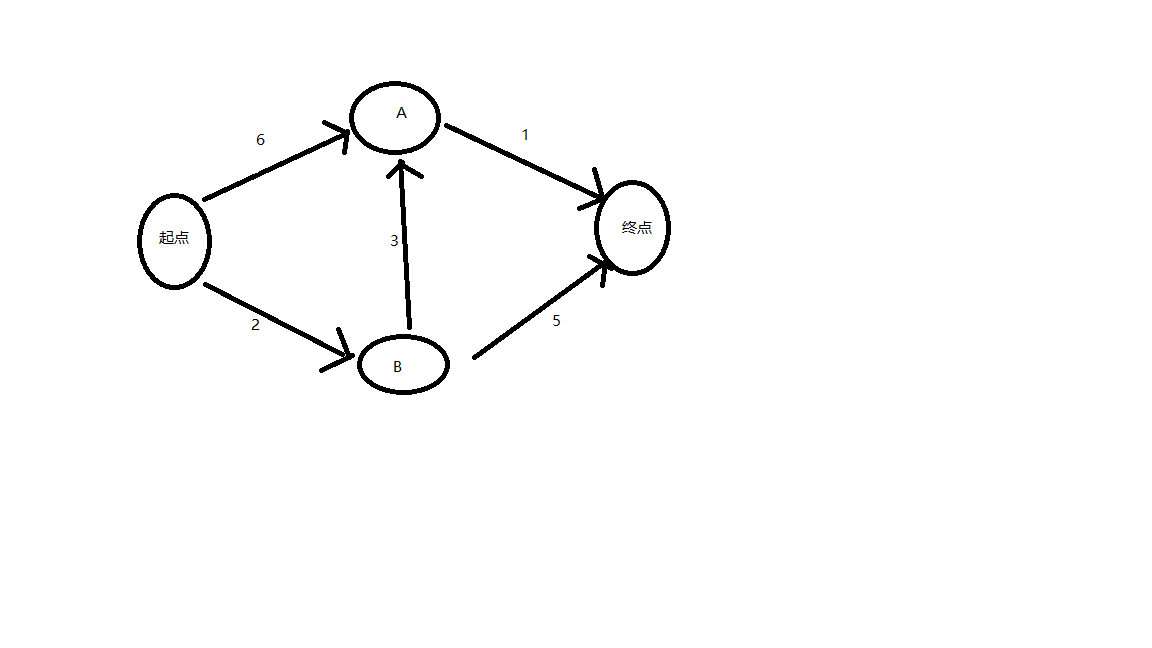
graph={} graph["start"]={} graph["start"]["a"]=6 graph["start"]["b"]=2 graph["b"]={} graph["b"]["a"]=3 graph["b"]["fin"]=5 graph["a"]={} graph["a"]["fin"]=1 graph["fin"]={} infinity=float("inf") costs={} costs["a"]=6 costs["b"]=2 costs["fin"]=infinity parents={} parents["a"]="start" parents["b"]="start" parents["fin"]=None processed=[] def find_lowest_cost_node(costs):#找出还未处理过的花费最小的点 lowest_cost=float("inf") lowest_cost_node=None for node in costs: cost = costs[node] if cost < lowest_cost and node not in processed: lowest_cost=cost lowest_cost_node=node return lowest_cost_node node=find_lowest_cost_node(costs) while node is not None:#这个while循环在所有节点都被处理过后结束 cost=costs[node] neighbors=graph[node] for n in neighbors.keys():#遍历当前节点的所有邻居 new_cost=cost+neighbors[n] if costs[n]>new_cost:#如果进过当前节点前往该邻居更近 costs[n]=new_cost#就更新该邻居的开销 parents[n]=node#并将该邻居的父节点设置为当前节点 processed.append(node)#将当前节点标记为处理过 node=find_lowest_cost_node(costs)#找出接下来要处理的节点,并循环 print(costs['fin'])
c++实现
#include<bits/stdc++.h> using namespace std; const int inf=1e6; const int num=105; struct edge{ int from,to,w; edge(int a,int b,int c){from=a,to=b,w=c;} }; vector<edge>e[num];//用邻接表纯图 struct costs_node{ int id,cost; costs_node(int b,int c){id=b,cost=c;} bool operator<(const costs_node & a) const {return cost>a.cost;} //优先队列花费小的节点先出队 }; priority_queue<costs_node>Q; int dis[num],vis[num]={0},fa[num]; void build(){//创建图 while(!Q.empty())Q.pop(); e[0].push_back(edge(0,1,6)); e[0].push_back(edge(0,2,2)); e[1].push_back(edge(1,3,1)); e[2].push_back(edge(2,3,5)); e[2].push_back(edge(2,1,3)); fa[1]=0; fa[2]=0; fa[3]=inf; dis[1]=6;//将起点的邻居节点初始化 dis[2]=2; Q.push(costs_node(1,6)); Q.push(costs_node(2,2)); Q.push(costs_node(3,inf)); } void print_path(int s,int t){//输出路径 if(s==t){ printf("%d",s);return; } print_path(s,fa[t]); printf("%d",t); } void Dijkstra(){ int s=0; for(int i=0;i<=3;i++){ dis[i]=inf; vis[i]=false; } dis[0]=0; build(); while(!Q.empty()){ costs_node u=Q.top(); Q.pop(); if(vis[u.id])continue; vis[u.id]=1; for(int i=0;i<e[u.id].size();i++){ edge y=e[u.id][i]; if(vis[y.to])continue; if(dis[y.to]>y.w+u.cost){ dis[y.to]=y.w+u.cost; Q.push(costs_node(y.to,dis[y.to])); fa[y.to]=u.id; } } } printf("%d\n",dis[3]); print_path(s,3);//输出路径 } int main(){ Dijkstra(); }