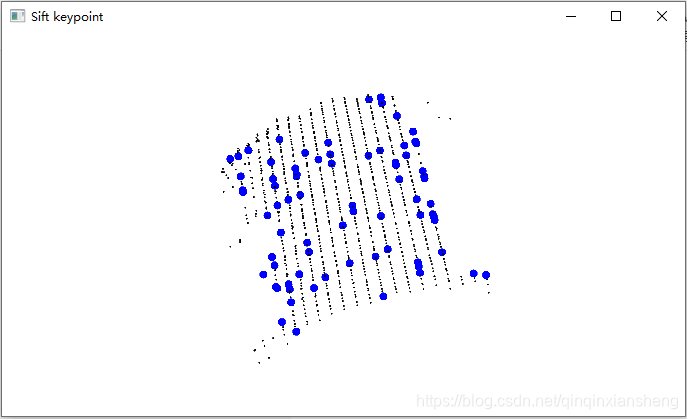
SIFT关键点提取:
#include <vtkAutoInit.h>
VTK_MODULE_INIT(vtkRenderingOpenGL);
VTK_MODULE_INIT(vtkInteractionStyle);
#include <iostream>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/common/io.h>
#include <pcl/features/normal_3d.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/console/time.h>
#include <pcl/keypoints/sift_keypoint.h>//sift
using namespace pcl;
namespace pcl
{
template<> struct SIFTKeypointFieldSelector<PointXYZ>
{
inline float
operator () (const PointXYZ &p) const
{
return p.z;
}
};
}
int main(int argc, char **argv)
{
//读取点云
pcl::PointCloud<pcl::PointXYZ>::Ptr loud(new pcl::PointCloud<pcl::PointXYZ>);
if pcl::io::loadPCDFile<pcl::PointXYZ>("test.pcd", *cloud) = -1)
{
PCL_ERROR("Cloudn't ead file!");
system("pause");
return 1;
}
//sift关键点提取
const loat min_scale = 0.01; //设置尺度空间中最小尺度的标准偏差
const nt n_octaves = 6; //设置高斯金字塔组(octave)的数目
const nt n_scales_per_octave =4;//设置每组(octave)计算的尺度
const loat min_contrast = 0.01; //设置限制关键点检测的阈值
pcl::SIFTKeypoint<pcl::PointXYZ, cl::PointWithScale> sift;//创建sift关键点检测对象
pcl::PointCloud<pcl::PointWithScale> esult;
sift.setInputCloud(cloud);//设置输入点云
pcl::search::KdTree<pcl::PointXYZ>::Ptr ree(new pcl::search::KdTree<pcl::PointXYZ>());
sift.setSearchMethod(tree);//创建一个空的kd树对象tree,并把它传递给sift检测对象
sift.setScales(min_scale,n_octaves, n_scales_per_octave);//指定搜索关键点的尺度范围
sift.setMinimumContrast(min_contrast);//设置限制关键点检测的阈值
sift.compute(result);//执行sift关键点检测,保存结果在result
cout < "Sift_keypoints的大小是" << result.size() << endl;
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_temp(new pcl::PointCloud<pcl::PointXYZ>);
copyPointCloud(result, *cloud_temp);//将点类型pcl::PointWithScale的数据转换为点类型pcl::PointXYZ的数据
//可视化输入点云和关键点
pcl::visualization::PCLVisualizer viewer("Sift keypoint");
viewer.setBackgroundColor(255, 255, 255);
viewer.addPointCloud(cloud, "cloud");
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE,2, "cloud");
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR,0, 0, 0, "cloud");
viewer.addPointCloud(cloud_temp, "keypoints");
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE,8, "keypoints");
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR,0.0, 0.0, 255.0, "keypoints");
while (!viewer.wasStopped())
{
viewer.spinOnce();
}
return 0;
}
Harris关键点提取:
#include <vtkAutoInit.h>
VTK_MODULE_INIT(vtkRenderingOpenGL);
VTK_MODULE_INIT(vtkInteractionStyle);
#include <iostream>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/common/io.h>
#include <pcl/features/normal_3d.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/console/time.h>
#include <pcl/keypoints/harris_3D.h>//harris
using namespace pcl;
int main(int argc, char **argv)
{
//读取点云
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
if (pcl::io::loadPCDFile<pcl::PointXYZ>("test.pcd", *cloud) == -1)
{
PCL_ERROR("Cloudn't read file!");
system("pause");
return -1;
}
//Harris关键点提取
float r_normal;
float r_keypoint;
r_normal = 0.6;
r_keypoint = 0.8;
typedef pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZI> ColorHandlerT3;
pcl::PointCloud<pcl::PointXYZI>::Ptr Harris_keypoints(new pcl::PointCloud<pcl::PointXYZI>()); pcl::HarrisKeypoint3D<pcl::PointXYZ,pcl::PointXYZI,pcl::Normal>* harris_detector = new pcl::HarrisKeypoint3D<pcl::PointXYZ, pcl::PointXYZI, pcl::Normal>;
harris_detector->setRadius(r_normal); //设置法向量估算的半径
harris_detector->setRadiusSearch(r_keypoint);
//设置关键点估计的近邻搜索半径
harris_detector->setInputCloud(cloud);
harris_detector->compute(*Harris_keypoints);
cout<< "Harris_keypoints的大小是" <<Harris_keypoints->size()<< endl;
//显示harris关键点
pcl::visualization::PCLVisualizer viewer("clouds");
viewer.setBackgroundColor(255,255, 255); viewer.addPointCloud(Harris_keypoints,ColorHandlerT3(Harris_keypoints,0.0, 0.0, 255.0),
"Harris_keypoints"); viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE,8, "Harris_keypoints");
viewer.addPointCloud(cloud,"cloud"); viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR,0,0, 0, "cloud");
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE,
2, "cloud");
viewer.setCameraPosition(0,0, 0, 0, 156, -20, 0, 0, 1, 0);//设置相机位置,焦点,方向
viewer.spin();
return 0;
}
参考:
https://www.cnblogs.com/freshmen/p/4254573.html
https://blog.csdn.net/SLAM_masterFei/article/details/85326838
