最近这段时间上手了下RTT,那真叫一个香啊,具体的使用请参考RTT官方文档:
UART 设备
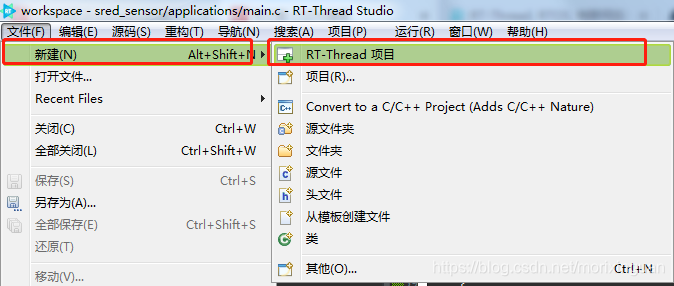
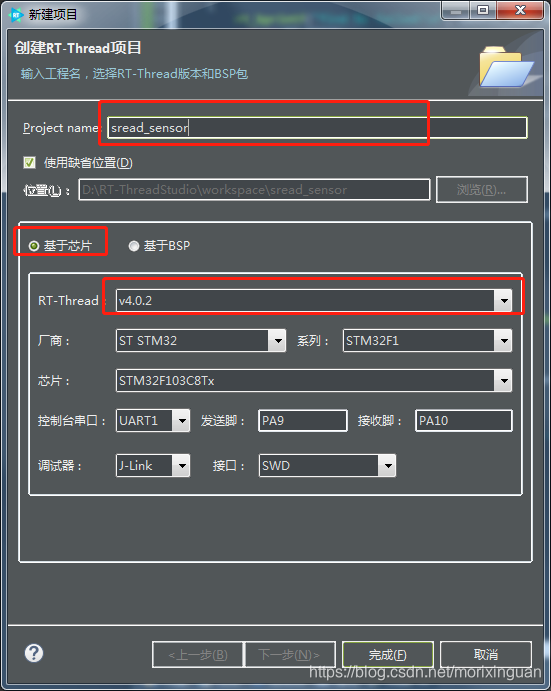
首先用RT-Thread Studio创建一个RTT项目:
选择基于芯片还是基于BSP,这里我选择的是基于芯片,用STM32F103C8T6这个板子来跑:
接下来开始配置组件:

双击以后会弹出:

这里我配置了ulog日志、串口、Pin以及finsh命令,接下来开始熟悉串口设备配置和使用的步骤:
1、配置串口
(1)在board.h中配置串口
//我的传感器接在USART2上,所以需要定义该宏。
#define BSP_USING_UART2
(2)配置串口2对应的GPIO以及TX、RX对应的引脚
#define UART2_TX_PORT GPIOA
#define UART2_RX_PORT GPIOA
#define UART2_TX_PIN GPIO_PIN_2
#define UART2_RX_PIN GPIO_PIN_3
2、在主函数中开始调用串口组件相关的函数使用串口
定义串口句柄以及配置句柄
/*接收成功标志位*/
uint8_t rk_ok_flag = 0;
static rt_device_t serial;
#define SAMPLE_UART_NAME "uart2"
struct serial_configure config = RT_SERIAL_CONFIG_DEFAULT; /* 初始化配置参数 */
对应的RT_SERIAL_CONFIG_DEFAULT是默认的串口参数,如下:
/* Default config for serial_configure structure */
#define RT_SERIAL_CONFIG_DEFAULT \
{ \
BAUD_RATE_115200, /* 115200 bits/s */ \
DATA_BITS_8, /* 8 databits */ \
STOP_BITS_1, /* 1 stopbit */ \
PARITY_NONE, /* No parity */ \
BIT_ORDER_LSB, /* LSB first sent */ \
NRZ_NORMAL, /* Normal mode */ \
RT_SERIAL_RB_BUFSZ, /* Buffer size */ \
0 \
}
如果需要调整波特率或者串口的其它参数,则需重新修改对应的配置参数即可。
(1)查找串口设备
serial = rt_device_find(SAMPLE_UART_NAME);
if (!serial)
{
rt_kprintf("find %s failed!\n", SAMPLE_UART_NAME);
return RT_ERROR;
}
(2)修改串口参数
由于我使用的传感器波特率是9600,其它参数默认,则只需修改波特率即可
config.baud_rate = BAUD_RATE_9600; //修改波特率为 9600
//config.data_bits = DATA_BITS_8; //数据位 8
//config.stop_bits = STOP_BITS_1; //停止位 1
//config.bufsz = 128; //修改缓冲区 buff size 为 128
//config.parity = PARITY_NONE; //无奇偶校验位
/*修改后通过调用设备控制接口将串口参数写入*/
rt_device_control(serial, RT_DEVICE_CTRL_CONFIG, &config);
(3)打开串口设备(这里我选用的是中断接收)
rt_device_open(serial, RT_DEVICE_FLAG_INT_RX | RT_DEVICE_FLAG_STREAM);
//上面的参数对应以下含义:
//#define RT_DEVICE_FLAG_INT_RX 0x100 /**< INT mode on Rx */
//#define RT_DEVICE_FLAG_DMA_RX 0x200 /**< DMA mode on Rx */
//#define RT_DEVICE_FLAG_INT_TX 0x400 /**< INT mode on Tx */
//#define RT_DEVICE_FLAG_DMA_TX 0x800 /**< DMA mode on Tx */
//#define RT_DEVICE_FLAG_STREAM 0x040 /**< stream mode */
(4)设置串口中断接收回调函数
rt_device_set_rx_indicate(serial, uart_recv_callback);
//这里uart_recv_callback即是串口的中断回调函数,当接收到数据时会触发回调函数。
//需要用户自己去实现。
回调函数实现如下:
/* 接收数据回调函数 */
static rt_err_t uart_recv_callback(rt_device_t dev, rt_size_t size)
{
/*接收到串口数据,将标志置1*/
rk_ok_flag = 1;
return RT_EOK;
}
(5)接收数据(这里我没有使用线程的方式去接收,而是直接在主函数中接收)
由于我的传感器数据格式如下:
序号 信号值 报警值\r\n
所以这里我需要做一下接收处理的判断,判断接收数据的默认是否为\r\n这两个字符,
如果是,则认为就是我的一行数据。
char ch;
int i = 0;
static int count = 1;
char buf[25] = { 0 };
while (1)
{
if (1 == rk_ok_flag && 0 == rt_device_read(serial, -1, &ch, 1))
{
rk_ok_flag = 0;
buf[i++] = ch;
if (buf[i - 2] == '\r' && buf[i - 1] == '\n')
{
count++;
rt_pin_write(LED0_PIN, count % 2);
i = 0;
rt_kprintf("传感器数据:%s\n", buf);
memset(buf, 0, 25);
}
}
}
3、整体源码实现
/*
* Copyright (c) 2006-2019, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2019-09-09 RT-Thread first version
*/
#include <rtthread.h>
#include <board.h>
#include <rtdevice.h>
#include <string.h>
#define DBG_TAG "main"
#define DBG_LVL DBG_LOG
#include <rtdbg.h>
/* PLEASE DEFINE the LED0 pin for your board, such as: PA5 */
#define LED0_PIN GET_PIN(C, 13)
uint8_t rk_ok_flag = 0;
static rt_device_t serial;
#define SAMPLE_UART_NAME "uart2"
struct serial_configure config = RT_SERIAL_CONFIG_DEFAULT; /* 初始化配置参数 */
/* 接收数据回调函数 */
static rt_err_t uart_recv_callback(rt_device_t dev, rt_size_t size)
{
rk_ok_flag = 1;
return RT_EOK;
}
int main(void)
{
char ch;
int i = 0;
static int count = 1;
char buf[25] = { 0 };
/* set LED0 pin mode to output */
rt_pin_mode(LED0_PIN, PIN_MODE_OUTPUT);
//1、查看串口设备
serial = rt_device_find(SAMPLE_UART_NAME);
if (!serial)
{
rt_kprintf("find %s failed!\n", SAMPLE_UART_NAME);
return RT_ERROR;
}
/* step2:修改串口配置参数 */
config.baud_rate = BAUD_RATE_9600; //修改波特率为 9600
/* step3:控制串口设备。通过控制接口传入命令控制字,与控制参数 */
if(RT_EOK != rt_device_control(serial, RT_DEVICE_CTRL_CONFIG, &config))
{
rt_kprintf("配置串口设备失败\n");
return RT_ERROR;
}
rt_kprintf("配置串口设备成功!\n");
/* step4:以中断接收及轮询发送模式打开串口设备 */
if(RT_EOK != rt_device_open(serial, RT_DEVICE_FLAG_INT_RX))
{
rt_kprintf("打开串口设备失败!\n");
return RT_ERROR;
}
rt_kprintf("打开串口设备成功!\n");
/* step5:设置接收回调函数 */
rt_device_set_rx_indicate(serial, uart_recv_callback);
/* step6:数据处理及展示 */
while (1)
{
if (1 == rk_ok_flag && 0 == rt_device_read(serial, -1, &ch, 1))
{
rk_ok_flag = 0;
buf[i++] = ch;
if (buf[i - 2] == '\r' && buf[i - 1] == '\n')
{
i = 0;
count++;
/*调试灯翻转*/
rt_pin_write(LED0_PIN, count % 2);
rt_kprintf("传感器数据:%s\n", buf);
memset(buf, 0, 25);
}
}
}
return RT_EOK;
}
对源码进行编译:

4、执行结果

不到100行,确实很牛逼!
