本人要开始做关于相控阵的毕设了。无奈基础太差,技术太菜,遂开始从零学起阵列处理方面的知识——以供复习和参考。H.L.Vans Trees ,Optimum Array Processing
你想嘛,接收一个复杂的信号 拿着一根天线/麦克风在那杵着多捞啊。一个OV开头的摄像头模块都有很多感光阵元(这个。。其实和本文内容无关)。阵列处理中要经历加权处理(后文将提到) 所以理论上,阵列处理更能消除误差(或者更敏感,反正学着学着就知道了,不是吗)。
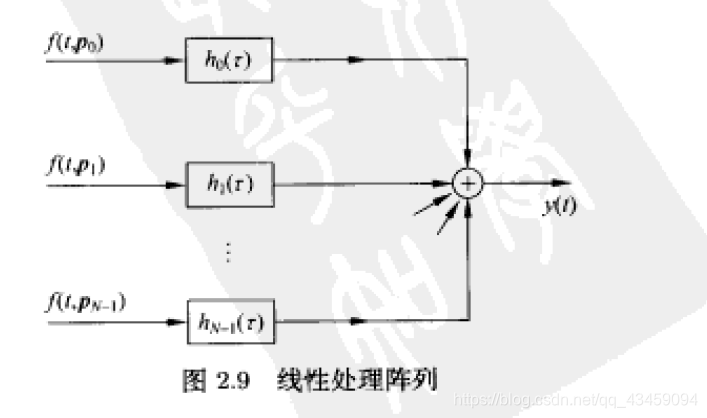
空域采样(Spatial Sampling) 。
f
(
t
,
p
)
=
[
f
(
t
,
p
0
)
f
(
t
,
p
1
)
.
.
.
f
(
t
,
p
N
−
1
)
]
\bm{f}(t,\bm{p})= \left[ \begin{matrix} f(t,\bm{p_0})\\ f(t,\bm{p_1})\\ .\\ .\\ .\\ f(t,\bm{p_{N-1}})\\ \end{matrix} \right]
f ( t , p ) = ⎣ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎡ f ( t , p 0 ) f ( t , p 1 ) . . . f ( t , p N − 1 ) ⎦ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎤
y
(
t
)
=
∑
n
=
0
N
−
1
∫
−
∞
∞
h
n
(
t
−
τ
)
f
n
(
τ
,
p
n
)
d
τ
y(t)=\sum_{n=0}^{N-1}\int_{-\infty}^{\infty}h_n(t-\tau)f_n(\tau,\bm{p_n})d\tau
y ( t ) = n = 0 ∑ N − 1 ∫ − ∞ ∞ h n ( t − τ ) f n ( τ , p n ) d τ
h
n
h_n
h n
h
(
τ
)
=
[
h
0
(
τ
)
h
1
(
τ
)
.
.
.
h
N
−
1
(
τ
)
]
\bm{h}(\tau)= \left[ \begin{matrix} h_0(\tau)\\ h_1(\tau)\\ .\\ .\\ .\\ h_{N-1}(\tau)\\ \end{matrix} \right]
h ( τ ) = ⎣ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎡ h 0 ( τ ) h 1 ( τ ) . . . h N − 1 ( τ ) ⎦ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎤
y
(
t
)
y(t)
y ( t )
y
(
t
)
=
∫
−
∞
∞
h
T
(
t
−
τ
)
f
(
τ
,
p
)
d
τ
y(t)=\int_{-\infty}^{\infty}\bm{h}^T(t-\tau)\bm{f}(\tau,\bm{p})d\tau
y ( t ) = ∫ − ∞ ∞ h T ( t − τ ) f ( τ , p ) d τ
y
(
t
)
y(t)
y ( t )
Y
(
ω
)
=
∫
−
∞
∞
y
(
t
)
e
−
j
ω
t
d
t
=
H
T
(
ω
)
F
(
ω
)
\begin{aligned} Y(\omega)&=\int_{-\infty}^{\infty}y(t)e^{-j\omega t}dt\\ &=\bm{H^T}(\omega)\bm{F}(\omega) \end{aligned}
Y ( ω ) = ∫ − ∞ ∞ y ( t ) e − j ω t d t = H T ( ω ) F ( ω )
∞
\infty
∞
f
(
t
)
f(t)
f ( t )
f
(
t
,
p
)
=
[
f
(
t
−
τ
0
)
f
(
t
−
τ
1
)
.
.
.
f
(
t
−
τ
N
−
1
)
]
\bm{f}(t,\bm{p})= \left[ \begin{matrix} f(t-\tau_0)\\ f(t-\tau_1)\\ .\\ .\\ .\\ f(t-\tau_{N-1})\\ \end{matrix} \right]
f ( t , p ) = ⎣ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎡ f ( t − τ 0 ) f ( t − τ 1 ) . . . f ( t − τ N − 1 ) ⎦ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎤
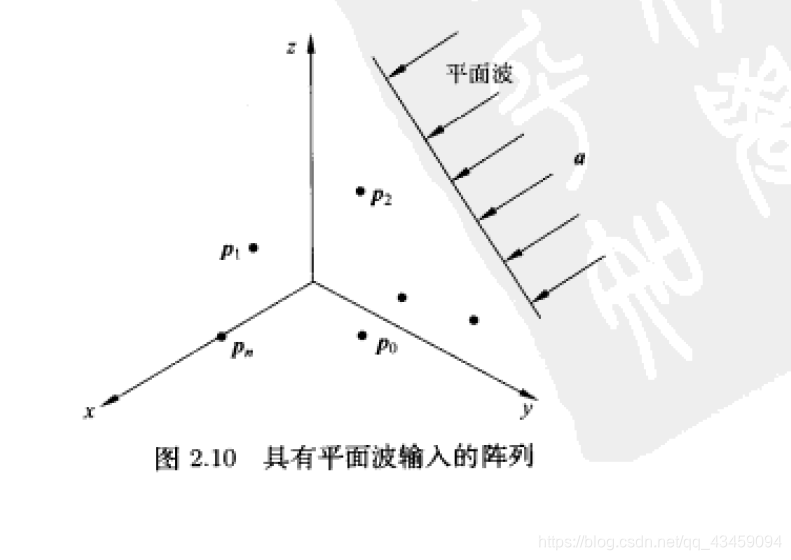
a
=
[
−
sin
θ
c
o
s
ϕ
−
sin
θ
s
i
n
ϕ
−
c
o
s
θ
]
\bm{a}= \left[ \begin{matrix} -\sin\theta cos\phi\\ -\sin\theta sin\phi\\ -cos\theta \end{matrix} \right]
a = ⎣ ⎡ − sin θ c o s ϕ − sin θ s i n ϕ − c o s θ ⎦ ⎤
τ
n
=
a
T
p
n
c
=
−
1
c
[
s
i
n
θ
c
o
s
ϕ
p
x
n
+
s
i
n
θ
s
i
n
ϕ
p
y
n
+
c
o
s
θ
p
z
n
]
\tau_n=\frac{\bm{a^Tp_n}}{c}=-\frac{1}{c}[sin\theta cos\phi\bm{p_{x_n}}+sin\theta sin\phi\bm{p_{y_n}}+cos\theta\bm{p_{z_n}}]
τ n = c a T p n = − c 1 [ s i n θ c o s ϕ p x n + s i n θ s i n ϕ p y n + c o s θ p z n ]
u
=
−
a
\bm{u}=-\bm{a}
u = − a
咱们接着鼓捣式子:
ω
τ
n
\omega\tau_n
ω τ n
ω
τ
n
=
ω
c
a
T
p
n
\omega\tau_n=\frac{\omega}{c}\bm{a^Tp_n}
ω τ n = c ω a T p n
c
o
s
(
ω
t
+
k
T
x
)
cos(\omega t+\bm{k^Tx})
c o s ( ω t + k T x )
k
=
ω
c
a
\bm{k}=\frac{\omega}{c}\bm{a}
k = c ω a
F
(
ω
)
\bm{F}(\omega)
F ( ω )
e
−
j
ω
τ
n
F
在
零
点
的
频
谱
!
这
句
话
以
后
都
省
略
了
!
(
ω
)
e^{-j\omega\tau_n}F_{在零点的频谱!这句话以后都省略了!} (\omega)
e − j ω τ n F 在 零 点 的 频 谱 ! 这 句 话 以 后 都 省 略 了 ! ( ω )
F
(
ω
)
=
F
(
ω
)
v
k
(
k
)
,
v
k
(
k
)
\bm{F}(\omega)=F(\omega)\bm{v_k(k)},\bm{v_k(k)}
F ( ω ) = F ( ω ) v k ( k ) , v k ( k )
v
k
(
k
)
=
[
e
−
j
k
T
p
0
e
−
j
k
T
p
1
.
.
.
e
−
j
k
T
p
N
−
1
]
\bm{v_k(k)}= \left[ \begin{matrix} e^{-j\bm{k^Tp_0}}\\ e^{-j\bm{k^Tp_1}}\\ .\\ .\\ .\\ e^{-j\bm{k^Tp_{N-1}}}\\ \end{matrix} \right]
v k ( k ) = ⎣ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎡ e − j k T p 0 e − j k T p 1 . . . e − j k T p N − 1 ⎦ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎤
课本上歪歪斜斜的写着‘波束形成器(beamformer)’五个字。我横竖睡不着,仔细看了半夜,才从字缝里看出字来,满本都写着两个字是‘重构’!
哎哟,这几个函数怎么鼓捣不完了,gay basis function)也就是每个阵元接收到的波为:
f
n
(
t
,
p
n
)
=
e
j
(
ω
t
−
k
T
p
n
)
f_n(t,\bm p_n)=e^{j(\omega t-\bm{k^Tp}_n)}
f n ( t , p n ) = e j ( ω t − k T p n )
f
(
t
,
p
)
=
e
j
ω
t
v
k
(
k
)
=
[
e
j
(
ω
t
−
k
T
p
0
)
e
j
(
ω
t
−
k
T
p
1
)
.
.
.
e
j
(
ω
t
−
k
T
p
N
−
1
)
]
\begin{aligned} \bm f(t,\bm p)&=e^{j\omega t}\bm{v_k(k)}\\ &= \left[ \begin{matrix} e^{j(\omega t-\bm{k^Tp}_0)}\\ e^{j(\omega t-\bm{k^Tp}_1)}\\ .\\ .\\ .\\ e^{j(\omega t-\bm{k^Tp}_{N-1})}\\ \end{matrix} \right] \end{aligned}
f ( t , p ) = e j ω t v k ( k ) = ⎣ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎡ e j ( ω t − k T p 0 ) e j ( ω t − k T p 1 ) . . . e j ( ω t − k T p N − 1 ) ⎦ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎤
v
k
H
(
k
s
)
\bm{v_k^H(k_s)}
v k H ( k s ) 上面的阵列处理器 对这个平面波的响应是:
h
(
τ
)
=
[
1
N
δ
(
τ
+
τ
0
)
1
N
δ
(
τ
+
τ
1
)
.
.
.
1
N
δ
(
τ
+
τ
N
−
1
)
]
\bm h(\tau)= \left[ \begin{matrix} \frac{1}{N}\delta(\tau+\tau_0)\\ \frac{1}{N}\delta(\tau+\tau_1)\\ .\\ .\\ .\\ \frac{1}{N}\delta(\tau+\tau_{N-1})\\ \end{matrix} \right]
h ( τ ) = ⎣ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎡ N 1 δ ( τ + τ 0 ) N 1 δ ( τ + τ 1 ) . . . N 1 δ ( τ + τ N − 1 ) ⎦ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎤
H
T
(
ω
)
=
1
N
v
k
H
(
k
s
)
=
1
N
[
e
j
k
T
p
0
e
j
k
T
p
1
.
.
.
e
j
k
T
p
N
−
1
]
T
\bm{H^T}(\omega)=\frac{1}{N}\bm{v_k^H(k_s)}= \frac{1}{N} \left[ \begin{matrix} e^{j\bm{k^Tp_0}}\\ e^{j\bm{k^Tp_1}}\\ .\\ .\\ .\\ e^{j\bm{k^Tp_{N-1}}}\\ \end{matrix} \right]^T
H T ( ω ) = N 1 v k H ( k s ) = N 1 ⎣ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎡ e j k T p 0 e j k T p 1 . . . e j k T p N − 1 ⎦ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎤ T
k
s
\bm{k_s}
k s
H
(
ω
)
=
1
N
v
k
∗
(
k
s
)
\bm{H}(\omega)=\frac{1}{N}\bm{v_k^*(k_s)}
H ( ω ) = N 1 v k ∗ ( k s )
别忘了,阵列处理是为了得到更好的结果。也就是得到一个更好的结果。
y
(
t
,
k
)
=
H
T
(
ω
)
v
k
(
k
)
e
j
ω
t
=
e
j
ω
t
y(t,\bm{k})=\bm H^T(\omega)\bm v_k(\bm k)e^{j\omega t}=e^{j\omega t}
y ( t , k ) = H T ( ω ) v k ( k ) e j ω t = e j ω t
γ
(
ω
,
k
)
≜
H
T
(
ω
)
v
k
(
k
)
\bm\gamma(\omega,\bm k)\triangleq\bm H^T(\omega)\bm v_k(\bm k)
γ ( ω , k ) ≜ H T ( ω ) v k ( k )
ω
\omega
ω
k
\bm k
k