序文
学習プロセス、「ROSのロボットプログラミングの練習を、」レコードは非常に明確ではありません最初の例話すの第三章は、第二の例を学習の最初のエントリとみなされ、初心者は本当に非常に友好的です。
実装プロセス
1.(あなたがウィキで詳細にこの点を伝えることはできません)尾状花ワークスペースを作成します。
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace
cd ~/catkin_ws
catkin_make
source devel/setup.bash
2、基本的なパッケージを作成します
基本的なパッケージを作成することはstd_msgとrospyに依存します
cd ~/catkin_ws/src
catkin_creat_pkg basic std_msg rospy
基本的にSrcのディレクトリ
cd basic/src
文書の作成と編集topic_publisher.py
touch topic_publisher.py
gedit topic_publisher.py
それにコードをコピーし、それを保存
#!/usr/bin/env python
import roslib; roslib.load_manifest('basic')
import rospy
from std_msgs.msg import Int32
rospy.init_node('topic_publisher')
pub = rospy.Publisher('counter', Int32)
rate = rospy.Rate(2)
count = 0
while not rospy.is_shutdown():
pub.publish(count)
count += 1
rate.sleep()
実行するように設定ファイルのパーミッション
chmod u+x topic_publisher.py
そして、あなたのリターンcatkin_wsを構築
cd ~/catkin_ws
catkin_make
それを有効にするために、書き込み環境変数と環境変数のソースファイル
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
Ctrl + Alt + T新しいターミナルを開くには、roscoreを開始します
roscore
ノードは、元の端末に情報の書かれたリリースを開始します
rosrun basic topic_publisher.py
プログラムの実装
この警告は無害と思われる、いくつかのちょうど入門Baiduはあまりにもそれぞれを解決する方法を理解するために見て検索します。
rostopicリスト印字実行トピックで、新しいターミナルを開くには
rostopic list
私たちは、ノードがすでに実行されて見ることができます。
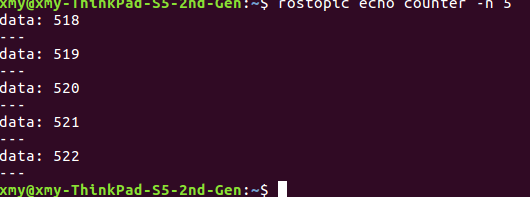
Rostopicエコー印刷データノード
rostopic echo counter -n 5
5つのメッセージをプリントし
、彼は私たちの期待収益率に応じて送信されているかどうかをテストするrostopicで
rostopic hz counter

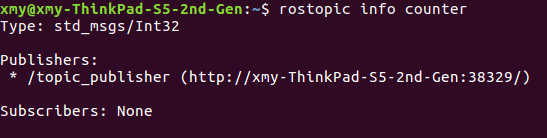
rostopic情報トピックを表示して停止印刷するには、Ctrl + Cは、宣言されています
rostopic info counter
クエリにrostopic検索して、すべてのトピックのメッセージのいずれかのタイプを公開
rostopic find std_msgs/Int32

[OK]を、この最後はそれは〜それを楽しみます
