序文
私は使用前に章789 turtlebot3の練習を行うので、「ROSのロボットプログラミングの練習、」レーザレーダセンサを使用してブック、turtlebot3は、12章検査ロボットは、すべての無力を深度カメラを使用してにturtlebot第一世代をインストールする必要がありました実験。
ROS:キネティック
のUbuntu:16.04.6
ガゼボ:7.0.0
インストールturtlebot
前任者の下で事前のおかげで、リファレンスロードガゼボとturtlebot
序文
ガゼボは最高のバージョン7.0である、またはturtlebot_simulatorエラーをインストールします。
次のように入力します。
gazebo -v
チェックガゼボのバージョンを、私は上記の参照リンクを削除するバージョンは、7.0.0でした。
ダウンロードturtlebot
インディゴバージョンROS:
sudo apt-get install ros-indigo-turtlebot ros-indigo-turtlebot-apps ros-indigo-turtlebot-interactions ros-indigo-turtlebot-simulator ros-indigo-kobuki-ftdi ros-indigo-rocon-remocon ros-indigo-rocon-qt-library ros-indigo-ar-track-alvar-msgs
キネティックバージョンROS:
sudo apt-get install ros-kinetic-turtlebot ros-kinetic-turtlebot-apps ros-kinetic-turtlebot-interactions ros-kinetic-turtlebot-simulator ros-kinetic-kobuki-ftdi
sudo apt-get install ros-kinetic-rocon-*
設定環境
echo "source /opt/ros/kinetic/setup.bash" >>~/.bashrc
source ~/.bashrc
どこROSのバージョン、運動紙ベースに運動。
更新ROS
rosdep update
この手順は非常に重要であり、更新のウェブサイトの更新が安定していない、と多くの場合、ここでは、失敗の携帯電話ホットスポットを使用することをお勧めします。ここでは言葉のないことで負荷ガゼボモデルに、ちょうどROSパッケージをダウンロードしたためであるが、世界のインタフェースを調製するのにこだわってきました。
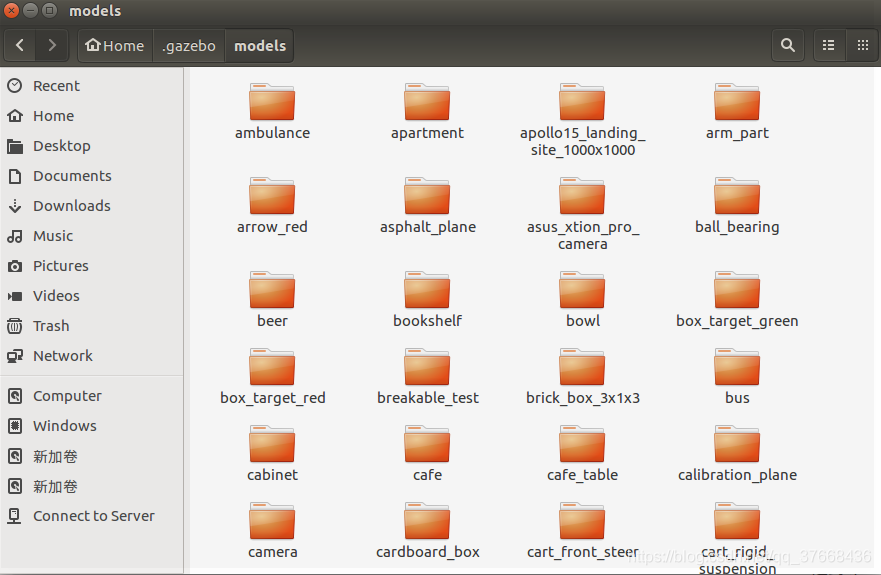
ガゼボモデルを追加
!!!このステップでは、それ以外のモデルがロードされている展望台は世界のインタフェースを用意して立ち往生している、非常に重要です。
:このhttps://bitbucket.org/osrf/gazebo_models/downloads/ガゼボをダウンロードするには、その後、ディレクトリ〜プレスCTRL + Hで隠しファイルを表示するには、すべてのモデル
.gazeboにして。作成モデルは、フォルダ、その後、ちょうどフォルダにダウンロードしたファイルを抽出します。
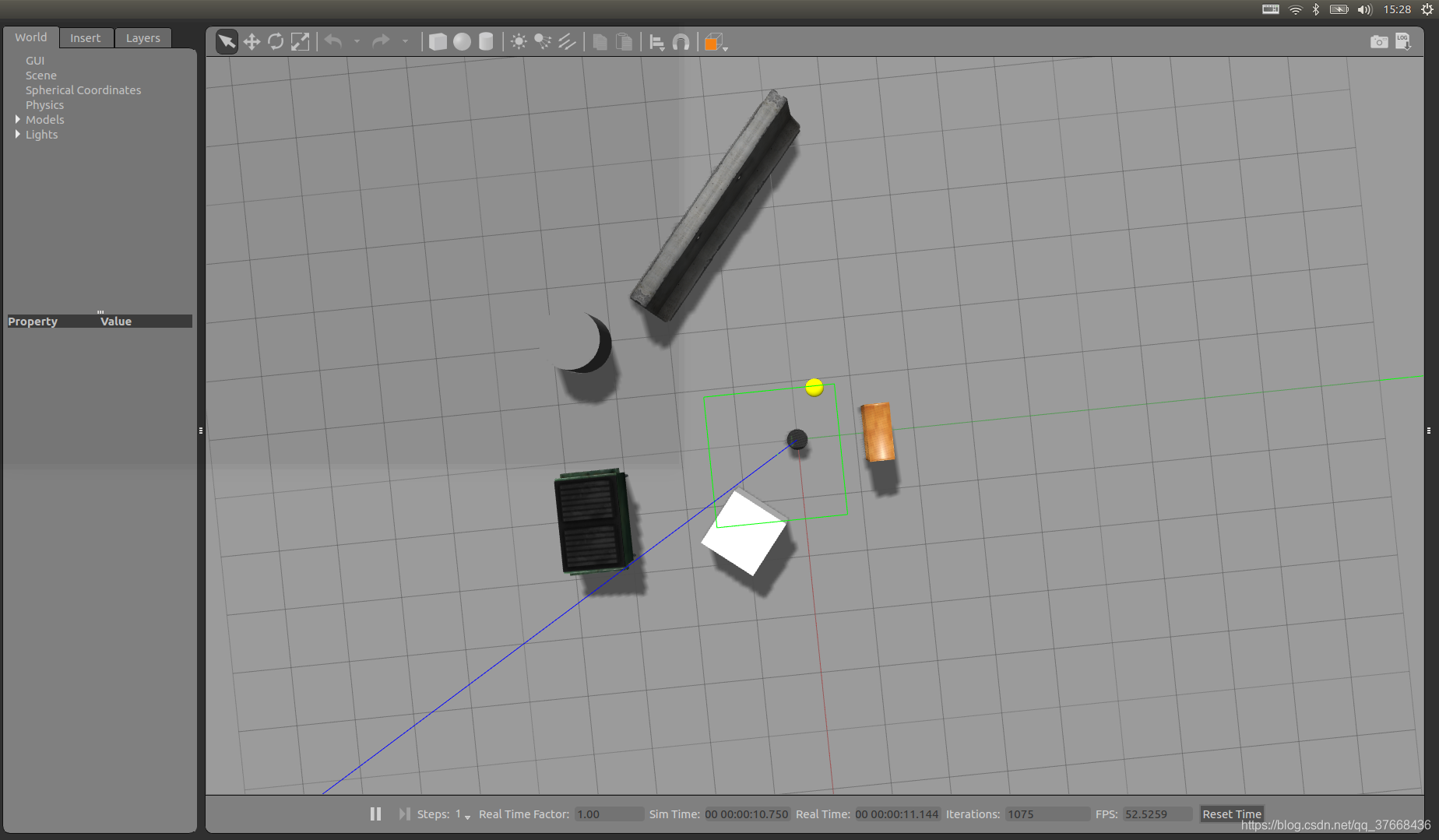
スタートシミュレーション環境
roslaunch turtlebot_gazebo turtlebot_world.launch
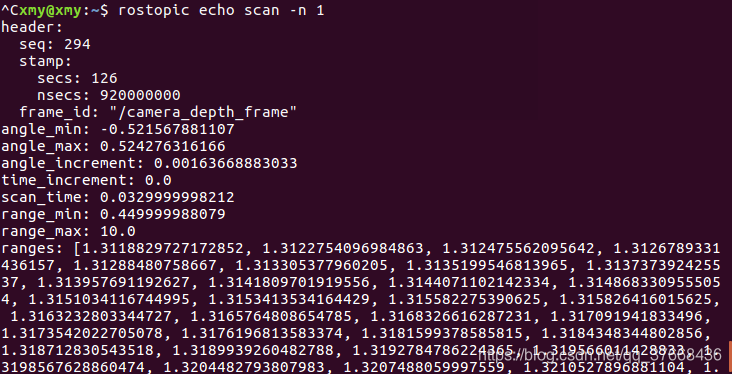
データ読み取りセンサ
rostopic echo scan -n 1
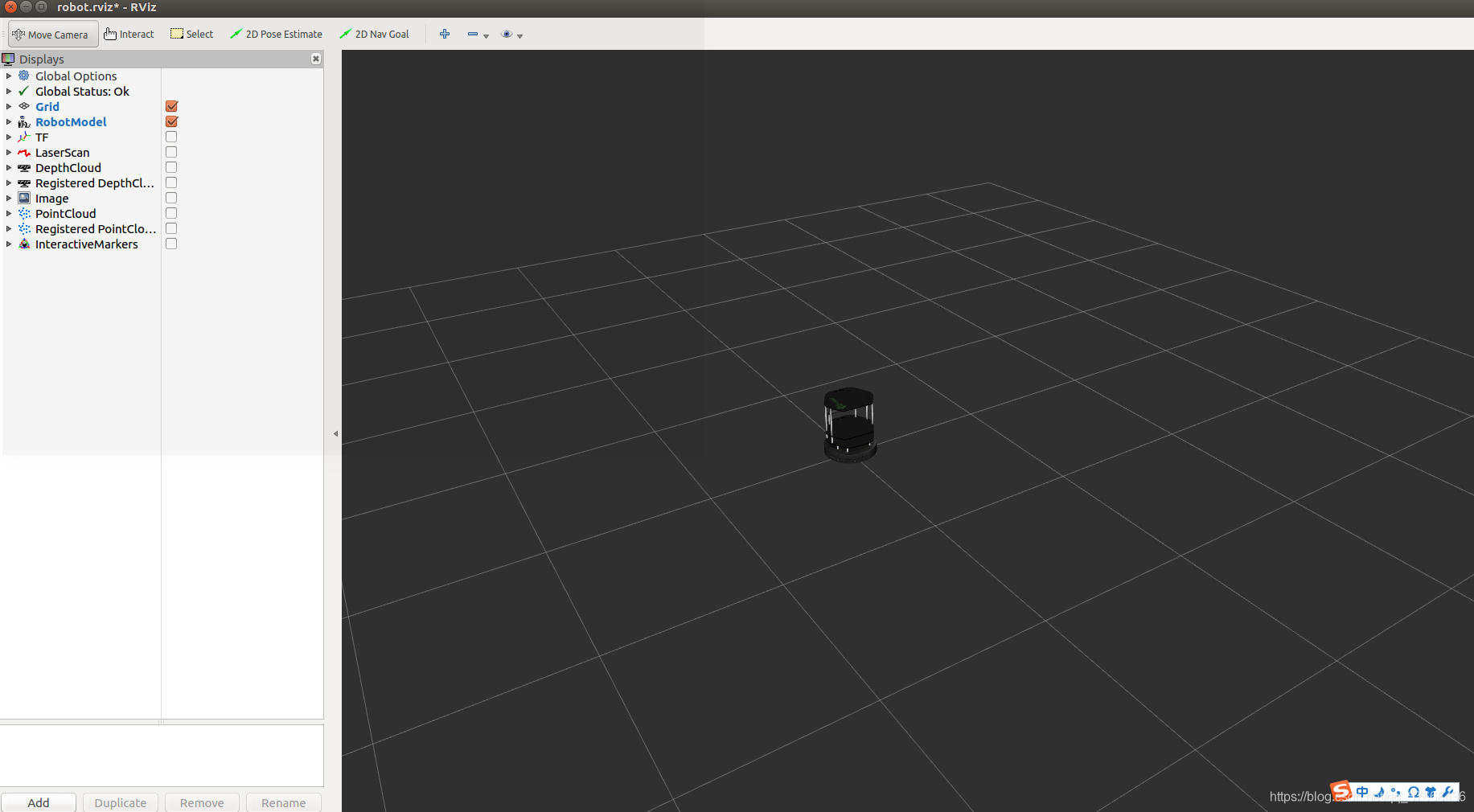
ロボットrvizの動作で
世界地図をロードします
roslaunch turtlebot_gazebo turtlebot_world.launch
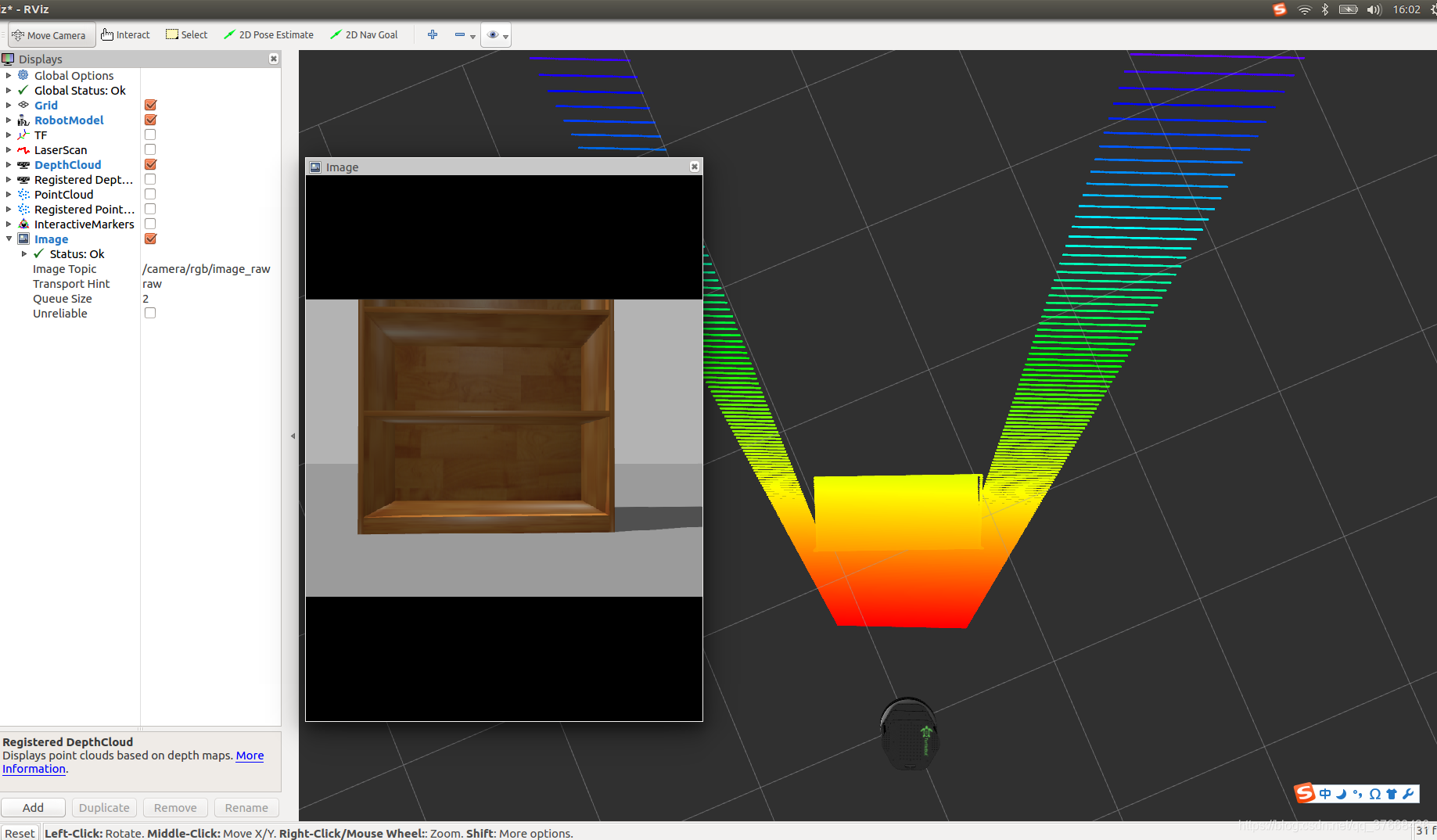
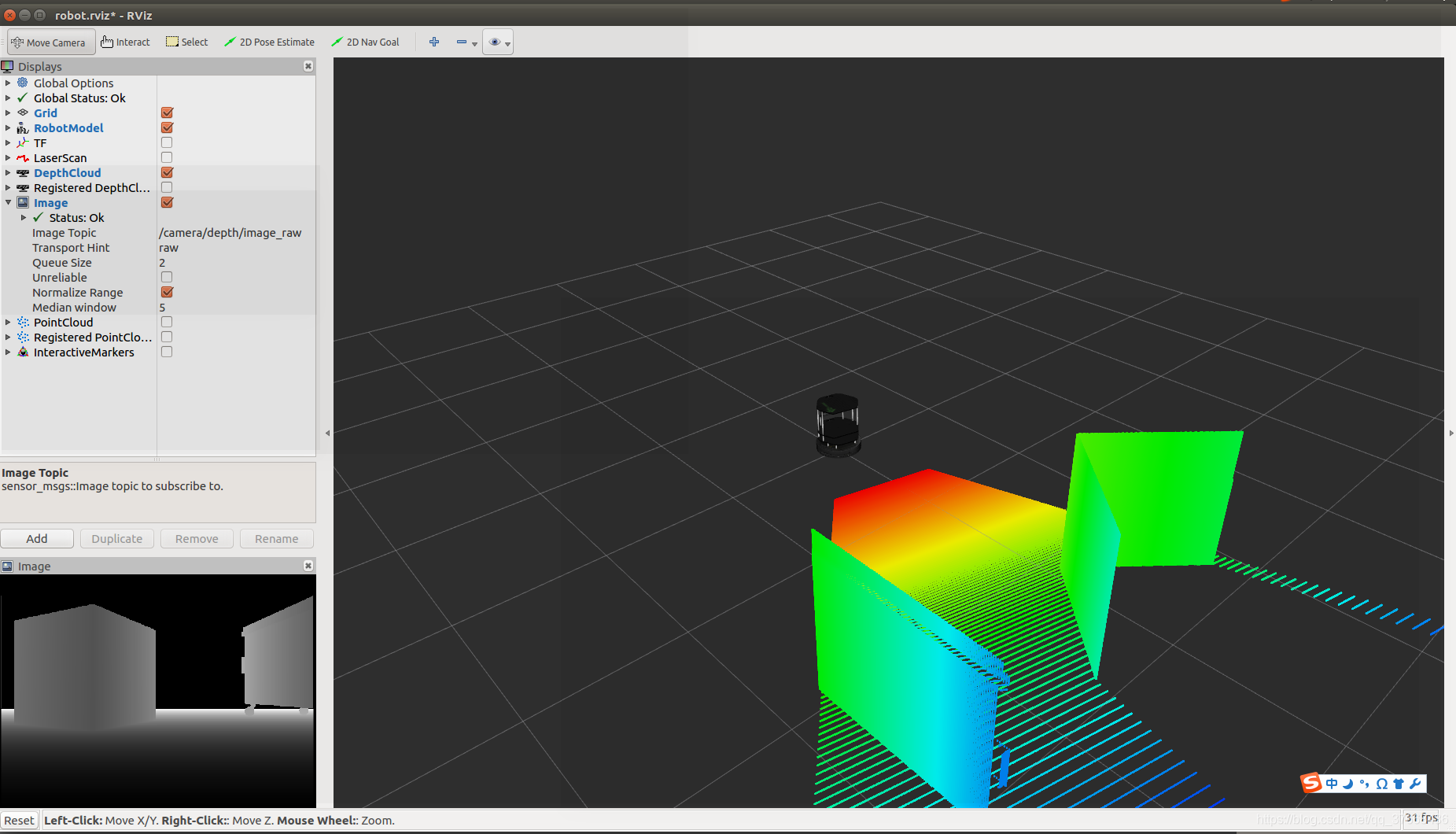
表示rvizで
roslaunch turtlebot_rviz_launchers view_robot.launch --screen
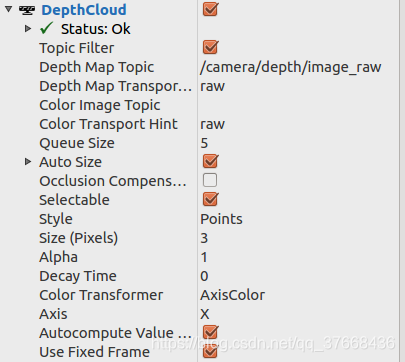
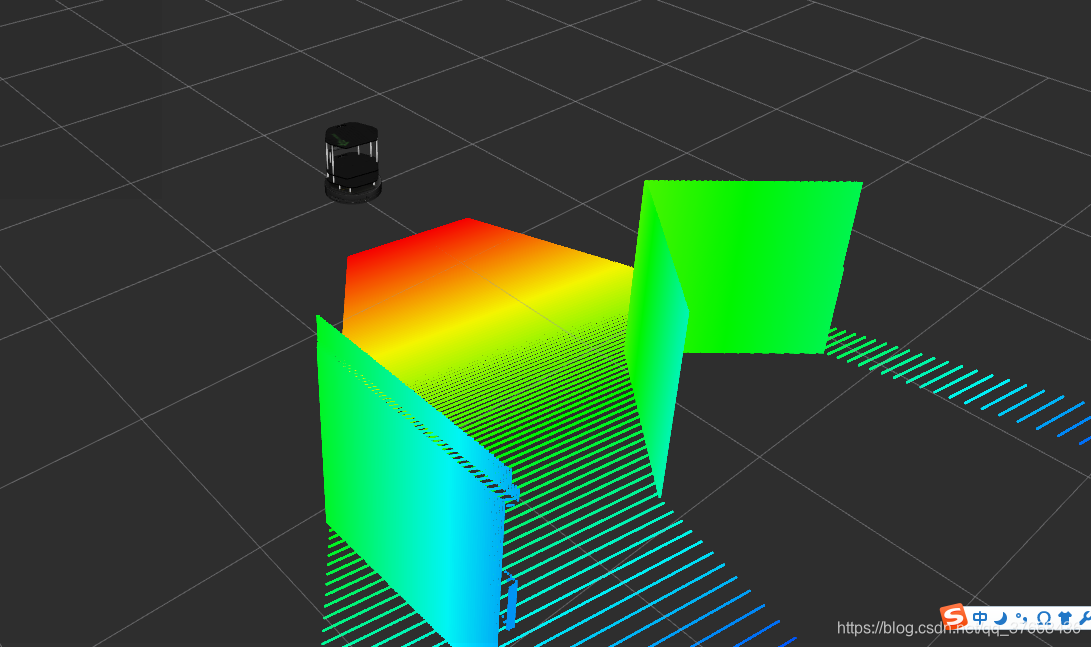
DepthCloudオプション
表示深度カメラデータ
イメージオプション
表示深度画像または画像のRGB
絵の深さにトピックを選択:
RGBトピックのトピックを選択します。
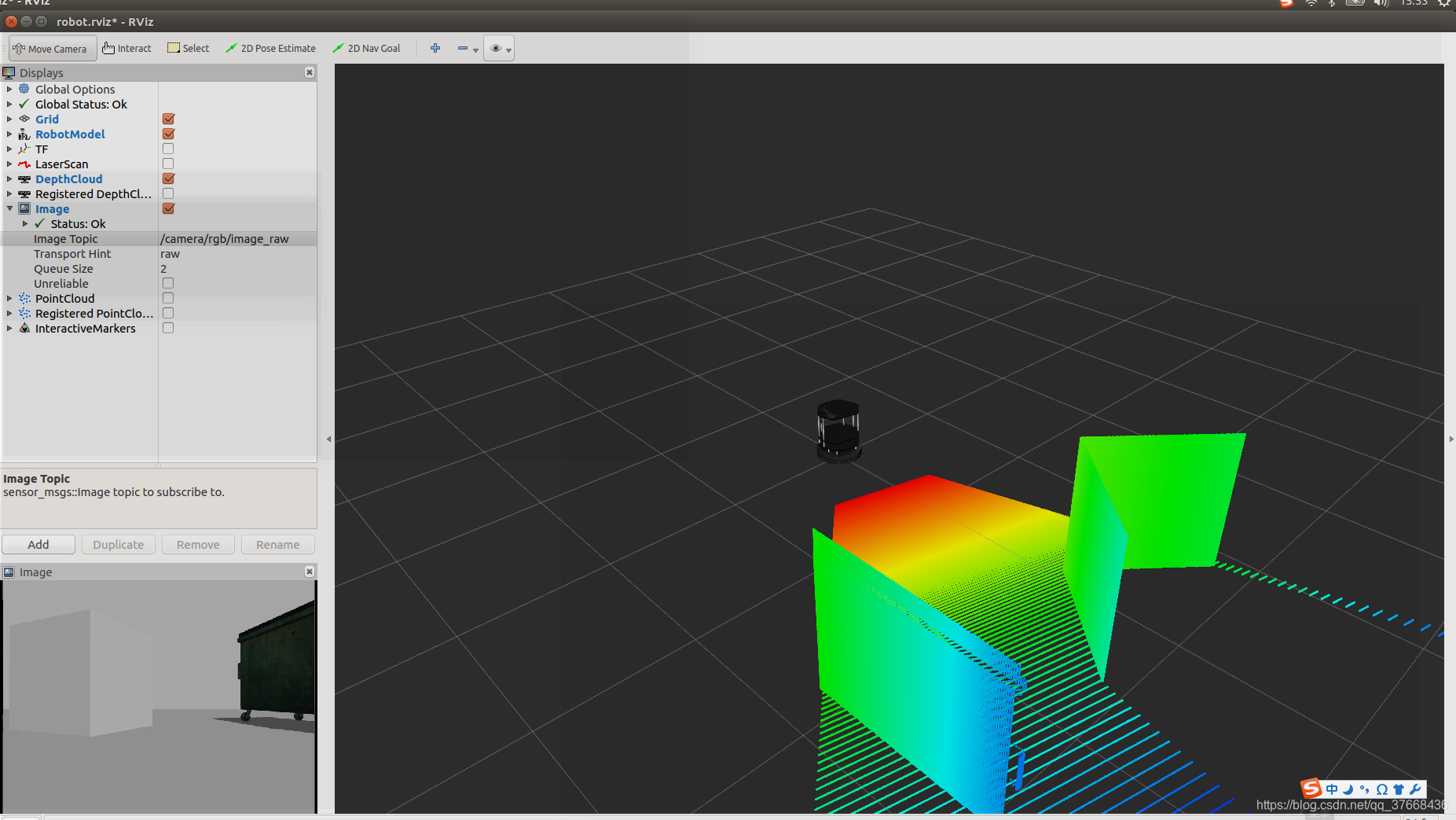
平面図: