最近ラズベリーパイで何かをやって、記録し、いくつかのピットがあり、L298Nモジュールを使用しています
私はこのほとんど長い道のりを使用します
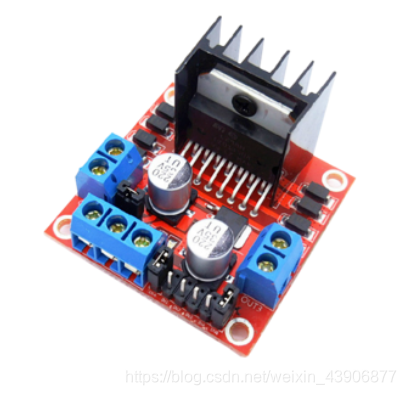
このセクションでは、L298Nモジュールを紹介します
L298Nモータ駆動モジュールは、モジュールで、それを行うと、我々は回転にモーターをしたい場合は、私たちが知っていることをその上にモータに適切な電圧を追加する必要があるが、我々は、複数のモータを駆動場合、またはマイクロコントローラを使用しますか、モータを制御するためにラズベリーパイプログラムは、私たちは「スイッチ」を選択値する達成するために私たちが使用する電源プラグを実現することが可能であり、かつハイとローの真理値表の使用はオープンシャシへの切り替えを伝えることに合意しましたシャシ侯の近く。我々はミドルウェアモータ駆動モジュールを呼び出し、このことを行うために使用される、L298Nは、一般的に使用されています
以下に示すようにハイとローの入力を受け付けるための4つのL2898Nは、あります
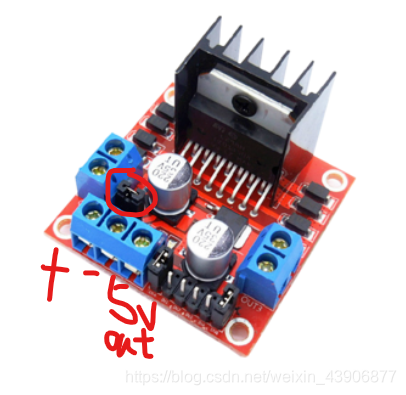
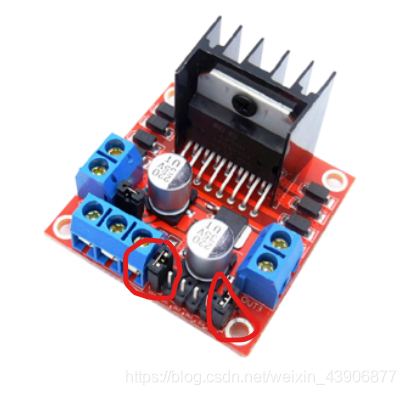
電源入力端子
もちろん、信号の受光端が、以下に示すように、仕事、L298N 2つの電源入力をせず、以下6Vのより大きくより少ない7Vより、一方の入力が供給され、Iは、試験し、理論的には7-12V入力され問題は、少しだけ激しいモーターを回していません。電圧が12Vより高い場合、この引数によると、淘宝網の店の外には、分圧回路を取るということですが、私は試していません。次の入力の出力は、ジャンパ上必要なインターフェースプルダウンの出力を使用して、5Vの出力であります
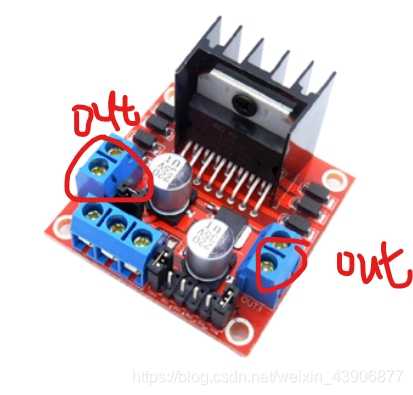
そして、出力
私たちは4つの入力は、左右、OUT1、OUT2、OUT3、OUT4に対応するIN1、IN2、IN3、IN4 2つの出力でありき 、 二十から二彼らは一緒。そして、真理値表は非常に簡単で
一つの高および1つの低、その潜在的な差がある、それが正常に動作します
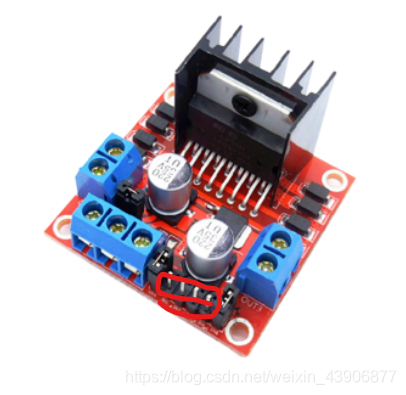
スピード
L298N機能だけでなくシャシ侯の開始を制御し、あなたはまた、PWMにより、速度を制御することができ
、それはやっている、と私は、特定の原則を知りませんでした。単に特定の速度を達成するために、つまり、我々は方形波の周期関数と呼ばれる電動学校の数は、PWMサイクルは高いデューティ・サイクル内で変更することである知っている、それを使用する方法を全サイクル時間のハイレベルを知ります変更、内部実装の詳細は、私はわかりません。この機能を使用するにはどのようにPWM。限りジャンパー線の制御端への次の除去とされます。我々は2つの出力、2つのPWM制御端子、入力の左右を制御します
ラズベリーパイは、その後、いくつかのコードを実行されます
import RPi.GPIO as GPIO
import time
#设置gpio端口编码方式
GPIO.setmode(GPIO.BOARD)
#设置不显示警告
GPIO.setwarnings(False)
#gpio端口定义,方便以后改接线方式
#pwm控制端定义
int1=11
int2=12
int3=13
#初始化函数
GPIO.setup(int2,GPIO.OUT)
GPIO.setup(int3,GPIO.OUT)
GPIO.setup(int1,GPIO.OUT)
#普通输出方式,此时pwm口应该接跳线帽,不然不工作
GPIO.output(int2,GPIO.HIGH)
GPIO.output(int3,GPIO.LOW)
time.sleep(10)
#定义pwm输出model,第一个参数是gpio口,第二个是频率
pwm=GPIO.PWM(int1,80)
pwm.start(90)
while True:
#改变占空比输出,此时为90
pwm.ChangeDutyCycle(90)
time.sleep(10)
#此时为30
pwm.ChangeDutyCycle(30)
time.sleep(10)
#此函数用来释放端口资源,不然电机会一直转下去
#GPIO.cleanup()
ここではいくつかのピットです
1)ラズベリーパイを必要とL298N共通の基盤を。それを理解するには良いです、そして、誰がそのレベルが高いああです低レベルであるかを知っている、共通の接地方法は非常にシンプルなツリーあなたなし共通の基盤であるということです負のように一緒にベリーパイGNDと電源のGPIO
ジャンパダウン2)プルは、PWMを使用し、そうでない場合、バックジャンパキャップを取るか、してはならない仕事
3)行うにはどのような問題を、I道はどこに問題が嘘を決定するためにこんなに早く、マルチメータ、最初のテストの出力のGPIOラズベリーパイ、その後、モーターの測定を使用できるようにすることです
