記事ディレクトリ
- エッジ検出は、修士課程のトピックや企業面接の質問としてみなされることが多いため、非常に重要です。この章では、いくつかの一般的なエッジ検出演算子を紹介します。
学習目標
ソーベル演算子、シャール演算子、ラプラシアン演算子を理解する
鋭いエッジ検出の原理と応用をマスターする
1. エッジ検出の原理
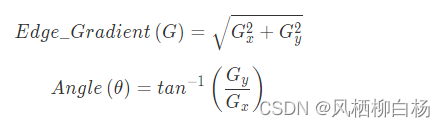
エッジ検出は画像処理とコンピューター ビジョンにおける基本的な問題であり、その目的はデジタル画像内の点を明白な明るさの変化で表現することです。画像属性の大幅な変更は、多くの場合、重要なイベントや属性の変更を反映しています。エッジ検出の式を次の図に示します。
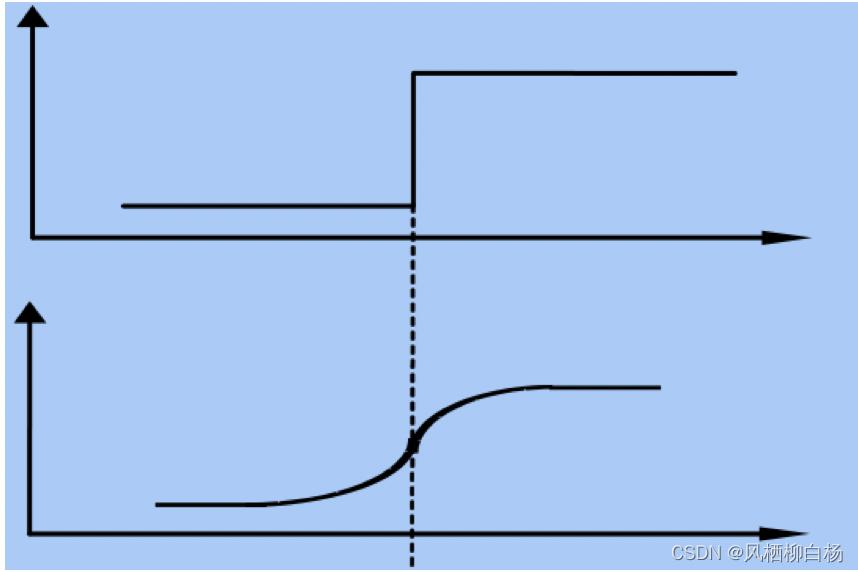
画像エッジ検出はデータ量を大幅に削減し、無関係と考えられる情報を削除し、画像の重要な構造属性を保持します。エッジ検出には多くの方法がありますが、そのほとんどは、検索ベースとゼロクロッシング ベースの 2 つのカテゴリに分類できます。
1. 検索に基づく
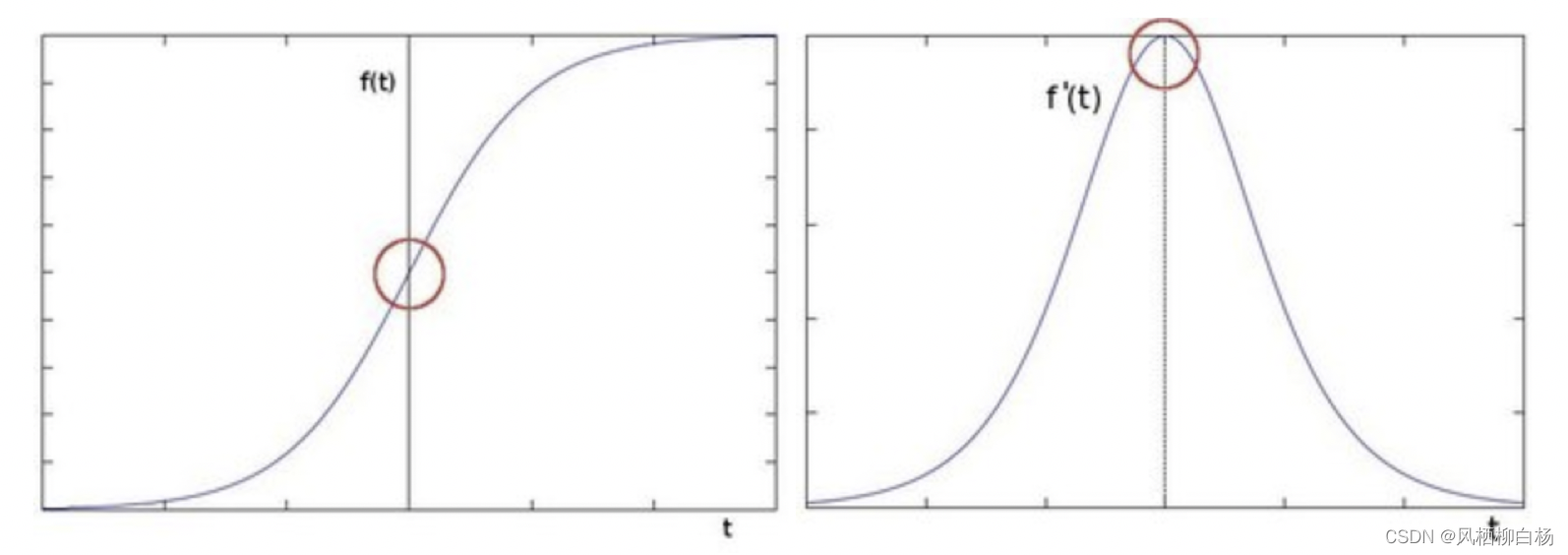
境界は、画像の一次導関数で最大値を見つけ、その計算結果を使用してエッジの局所的な方向を推定することによって検出されます。通常は勾配の方向が使用され、この方向は最大値を見つけるために使用されますローカル勾配モジュールの値 代表的なアルゴリズムとしては、Sobelオペレーターや Scharr オペレーターなどがあります。
(1) 画像の一次微分の最大値 -->
.
(2) エッジの局所方向 (一般的な勾配方向) -->
.
(3) 局所勾配モジュールの最大値
2. ゼロクロスに基づく
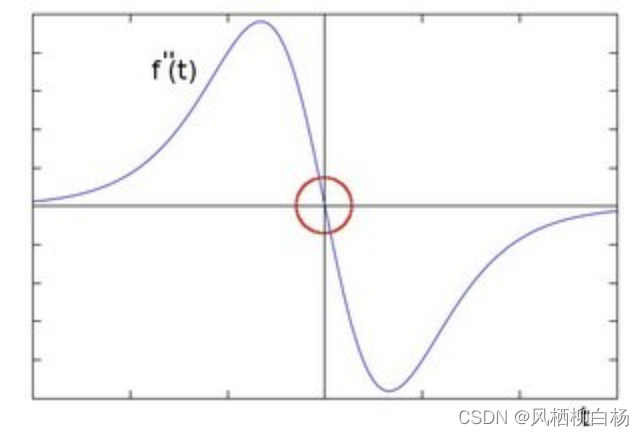
境界は、画像の二次導関数のゼロクロッシングを探すことによって検出され、代表的な演算子はラプラシアン演算子です。
ゼロ点は、関数が y 軸と交差する点です。
2. ソーベル検出演算子
Sobel エッジ検出アルゴリズムは比較的単純で、実際のアプリケーションでは巧妙なエッジ検出よりも効率的です。ただし、エッジはキャニー検出ほど正確ではありませんが、多くの実際のアプリケーションでは、Sobel オペレーターが最初の選択肢になります。
Sobel オペレータはガウス平滑化と微分演算を組み合わせたものであるため、ノイズ耐性が強く、用途が豊富です。特に、効率性の要件が高く、詳細なテクスチャをあまり気にしない場合はそうです。
1. 原理と方法の議論
不連続関数の場合、一次導関数は次のように記述できます。

または

次のようになります。

処理される画像が I であり、導関数が 2 方向に取得されると仮定します。
- 水平方向の変更: 画像 I を周期サイズのテンプレートで畳み込み、結果は Gx です。たとえば、テンプレート サイズが 3 の場合、Gx は次のようになります。

- 垂直方向の変動: 画像 I を技術的なサイズのテンプレートと畳み込み、結果は Gy です。たとえば、テンプレート サイズが 3 の場合、Gy は次のようになります。

画像の各点で、上記の 2 つの結果を組み合わせると、

統計的最大値の位置が画像のエッジになります。
**注意:** カーネル サイズが 3 の場合、上記の Sobel カーネルは明らかなエラーを生成する可能性があります。この問題を解決するには、Scharr 関数を使用しますが、この関数はサイズ 3 のカーネルでのみ機能します。この関数は Sobel 関数と同じくらい高速に動作しますが、結果はより正確です。次のように計算されます。

2. 申請
OpenCV を使用した Sobel エッジ検出の API は次のとおりです。
Sobel_x_or_y =
cv2.Sobel(src, ddepth, dx, dy, dst, ksize, scale, delta, borderType)
パラメータ:
- src: 受信画像
- d Depth: 画像の深度
- dx と dy: 導出の順序を指します。0 はこの方向には導出がないことを意味し、値は 0 と 1 です。
- ksize: は Sobel オペレーターのサイズ、つまり畳み込みカーネルのサイズです。1、3、5、または 7 の奇数である必要があり、デフォルトは 3 です。
- 注: ksize=-1 の場合、3x3 Scharr 演算子に進化します。
- スケール: スケーリング導関数の比例定数。デフォルトはスケーリング係数なしです。
- borderType: 画像の境界線のモード。デフォルト値は cv2.BORDER_DEFAULT です。
Sobel 関数が導関数を計算すると、負の値が発生し、255 を超える値が発生します。元のイメージは uint8 です。つまり、8 は符号なしの数値であるため、Sobel によって作成されたイメージには十分な桁数がないため、切り捨てられます。したがって、16 ビットの符号付きデータ型 cv2.CV_16s を使用します。画像を処理した後、 cv2.convertScaleAbs() 関数を使用して元の uint8 型に変換し直します。そうしないと、画像を表示できません。
Sobel 演算子は 2 方向で計算され、最後に cv2.addWeighted() 関数を使用して結合する必要があります。
Scale_abs = cv2.convertScaleAbs(x) # 格式转换函数
result = cv2.addWeighted(src1, alpha, src2, beta) # 图像混合
コード例:
import cv2 as cv
import numpy as np
from matplotlib import pyplot as plt
# 1 读取图像
img = cv.imread('./image/horse.jpg',0)
# 2 计算Sobel卷积结果
x = cv.Sobel(img, cv.CV_16S, 1, 0)
y = cv.Sobel(img, cv.CV_16S, 0, 1)
# 3 将数据进行转换
Scale_absX = cv.convertScaleAbs(x) # convert 转换 scale 缩放
Scale_absY = cv.convertScaleAbs(y)
# 4 结果合成
result = cv.addWeighted(Scale_absX, 0.5, Scale_absY, 0.5, 0)
# 5 图像显示
plt.figure(figsize=(10,8),dpi=100)
plt.subplot(121),plt.imshow(img,cmap=plt.cm.gray),plt.title('原图')
plt.xticks([]), plt.yticks([])
plt.subplot(122),plt.imshow(result,cmap = plt.cm.gray),plt.title('Sobel滤波后结果')
plt.xticks([]), plt.yticks([])
plt.show()

上記コードの Sobel オペレーター計算部分の ksize を -1 に設定します。これは、エッジ検出に scharr を使用することを意味します。
x = cv2.Sobel(img, cv2.CV_16S, 1, 0, ksize=-1)
y = cv2.Sobel(img, cv2.CV_16S, 0, 1, ksize=-1)
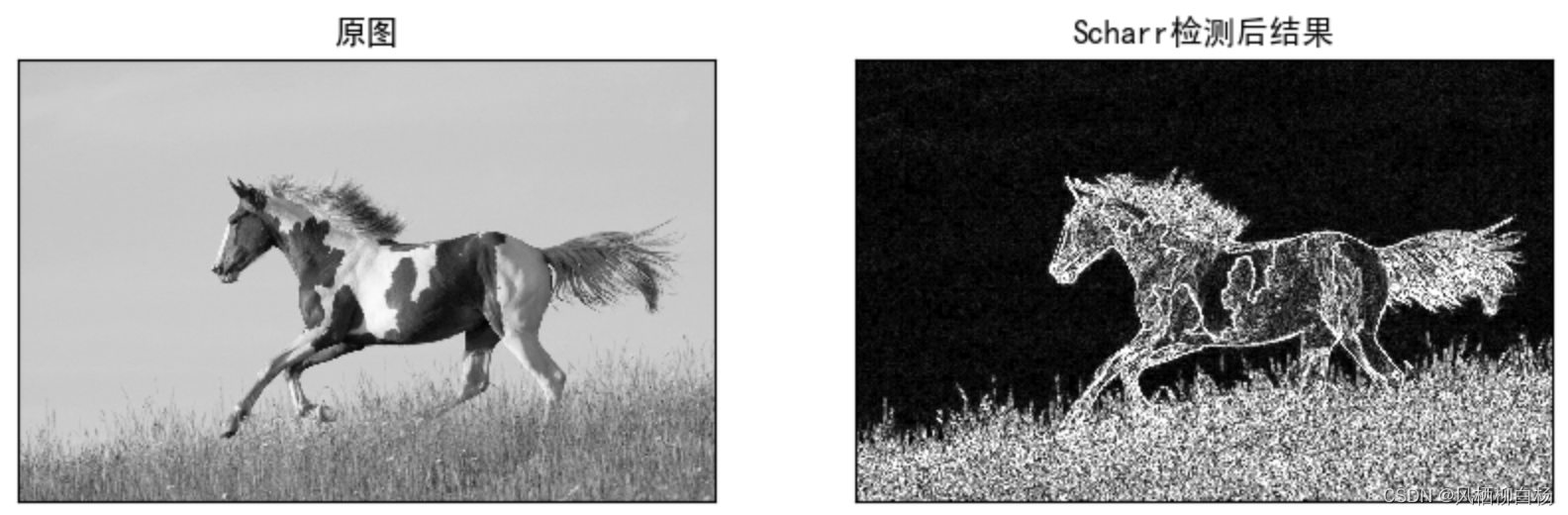
Scharr 演算子を使用すると、Sobel 演算子よりも検出効果がわずかに優れていることがわかります。
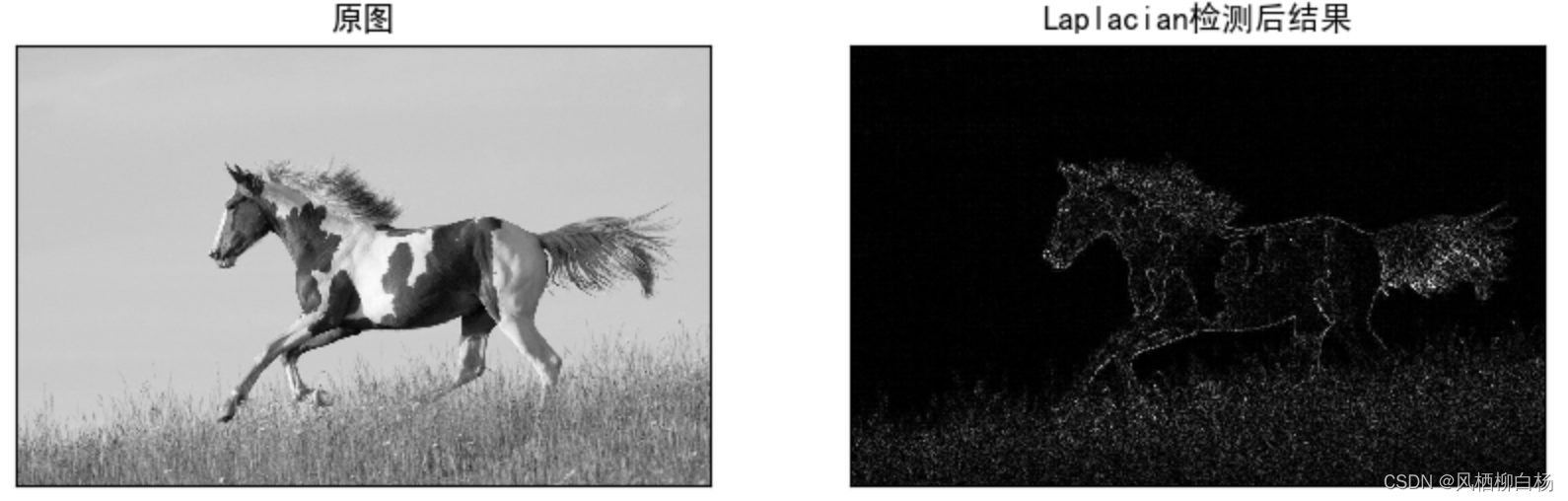
3. ラプラシアン演算子
ラプラシアン検出方法は、二次導関数を使用してエッジを検出します。画像は「2 次元」であるため、次の式に示すように、2 方向の導関数を導出する必要があります。 この場合、

不連続 2 次導関数は次のようになります。

この場合、使用されるコンボリューション カーネルは次のようになります。

API:
laplacian = cv2.Laplacian(src, ddepth[, dst[, ksize[, scale[, delta[, borderType]]]]])
パラメータ:
- ソース: 画像
- D Depth: 画像深度、-1 は、元の画像と同じ深度が使用されることを意味し、ターゲット画像の深度は元の画像の深度以上である必要があります。
- ksize: 演算子のサイズ、つまり畳み込みカーネルのサイズは 1、3、5、7 でなければなりません。
コード例:
import cv2 as cv
import numpy as np
from matplotlib import pyplot as plt
# 1 读取图像
img = cv.imread('./image/horse.jpg',0)
# 2 laplacian转换
result = cv.Laplacian(img,cv.CV_16S)
Scale_abs = cv.convertScaleAbs(result)
# 3 图像展示
plt.figure(figsize=(10,8),dpi=100)
plt.subplot(121),plt.imshow(img,cmap=plt.cm.gray),plt.title('原图')
plt.xticks([]), plt.yticks([])
plt.subplot(122),plt.imshow(Scale_abs,cmap = plt.cm.gray),plt.title('Laplacian检测后结果')
plt.xticks([]), plt.yticks([])
plt.show()
4. 鋭いエッジ検出
Canny エッジ検出アルゴリズムは非常に人気のあるエッジ検出アルゴリズムで、1986 年に John F. Canny によって提案され、最良のエッジ検出アルゴリズムであると考えられています。
1. Cannyアルゴリズムの原理
Canny エッジ検出アルゴリズムは 4 つのステップで構成されており、以下に説明します。
- ノイズ除去
エッジ検出はノイズの影響を受けやすいため、最初にガウス フィルターを使用してノイズを除去します。(ガウス フィルタリングについては、「画像のスムージング」で説明されています。読み進めてください)
- 画像の勾配を計算する
Sobel 演算子を使用して、平滑化されたイメージの水平方向と垂直方向の一次導関数 (Gx および Gy)を計算します。取得した 2 つの勾配マップ (Gx と Gy) に基づいて境界の勾配と方向を求めます。計算式は次のとおりです: ピクセルが
エッジの場合、その勾配の方向は常にエッジの方向と垂直になります。グラデーションの方向は、垂直方向、水平方向、斜め 2 方向の 4 つに分類されます。
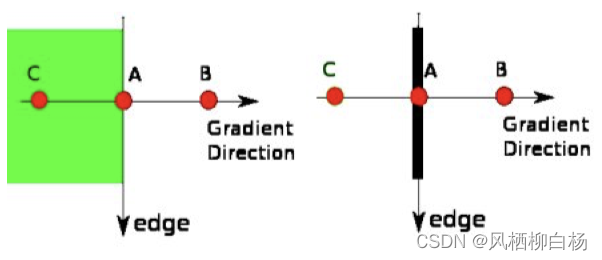
- 非最大抑制
勾配の方向と大きさを取得した後、画像全体をスキャンして境界上にない点を削除します。各ピクセルをチェックして、この点の勾配が、同じ勾配方向を持つ周囲の点の中で最大であるかどうかを確認します。下図のように、
点 A が画像の端にあり、その勾配変化方向において、画素点 B と点 C を選択して、点 A の勾配が最大値であるかどうかを確認します。値を変更しない場合はそのままにします。そうでない場合は、A ポイントが抑制され、最終結果は「細いエッジ」を持つバイナリ イメージになります。
- ヒステリシス閾値
ここで、真の境界を決定します。minVal と maxVal という 2 つのしきい値を設定します。画像のグレーの勾配が maxVal よりも高い場合、それが真の境界であるとみなされ、minVal より下の境界は破棄されます。両者の間にある場合は、その点が実際の境界点であると判断された境界点に接続されているかどうかに依存し、接続されている場合は境界点とみなされ、接続されていない場合は破棄されます。下図に示すように、
上図に示すように、A はしきい値 maxVal よりも高いため、実際の境界点です C は maxVal よりも低いですが、minVal よりも高く、A に接続されているため、も実際の境界点とみなされます。そして、B は maxVal より低く、実際の境界点に接続されていないため、破棄されます。したがって、適切な maxVal と minVal を選択することは、良好な結果を得るために非常に重要です。

2. 申請
opencv 中国医学でのカニ検出の実装に使用される API:
canny = cv2.Canny(image, threshold1, threshold2)
パラメータ:
- 画像: グレースケール画像、
- 閾値 1: minval、より小さい閾値は不連続エッジを接続します
- Threshold2: maxval、画像内の明らかなエッジを検出するためのより大きなしきい値 コード
例:
import cv2 as cv
import numpy as np
from matplotlib import pyplot as plt
# 1 图像读取
img = cv.imread('./image/horse.jpg',0)
# 2 Canny边缘检测
lowThreshold = 0
max_lowThreshold = 100
canny = cv.Canny(img, lowThreshold, max_lowThreshold)
# 3 图像展示
plt.figure(figsize=(10,8),dpi=100)
plt.subplot(121),plt.imshow(img,cmap=plt.cm.gray),plt.title('原图')
plt.xticks([]), plt.yticks([])
plt.subplot(122),plt.imshow(canny,cmap = plt.cm.gray),plt.title('Canny检测后结果')
plt.xticks([]), plt.yticks([])
plt.show()

要約:
1. エッジ検出の原理
(1) 検索による
(2) ゼロクロスを基準とする
2. ソーベル演算子【実用化】
(1) 探索方法に基づいて境界を取得する
(2)cv2.ソーベル()
(3)cv2.convertScaleAbs()
(4)cv2.addWeighted()
3. ラプラシアン演算子
(1) ゼロクロスに基づいて境界を求める
(2)cv2.ラプラシアン()
4.キャニーアルゴリズム
(1) ノイズ除去(ガウスフィルタリング)
(2) 画像の勾配を計算する(ソーベル演算子)
(3) 非最大抑制: ピクセルが境界点であるかどうかを判断します。
(4) ヒステリシス閾値: 最終的な境界を決定するために 2 つの閾値を設定します。
5. さまざまな従来の演算子の比較

- 強くなるまでの道は長くて険しい、さあさあ!!!