目次
ランダム サンプリング コンセンサス アルゴリズム (ランダム サンプル コンセンサス、RANSAC)
ブルートフォースブルートフォースマッチング
取得された固有ベクトルが 1 つずつ比較され、互いに最も近い 2 つの固有ベクトルが最も類似するはずです。
kp1, des1 = sift.detectAndCompute()この関数には 2 つの戻り値があり、最初の戻り値は特徴点の座標であり、2 番目の戻り値は特徴ベクトルです。- cv2.BFMatcher()のパラメータ: 最初のパラメータは使用される測定距離を示します。ここではユークリッド距離が使用されます。これはデフォルト値であり、配列のユークリッド距離を正規化するためにデフォルトで NORM_L2 が使用されます。2 番目のパラメータはブール値で、デフォルトは Faulse です。この例では、crossCheck は True、つまり 2 つの画像の特徴点は互いに一意である必要があります。たとえば、A と A の i 番目の特徴点は、 B の j 番目の特徴点 A の i 番目の特徴点に最も近い特徴点、B の j 番目の特徴点も
import cv2
import numpy as np
import matplotlib.pyplot as plt
img1=cv2.imread('E:/OpenCV/image/1shu.png',0)#灰度图
img2=cv2.imread('E:/OpenCV/image/2shu.png',0)#灰度图
def cv_show(name,img):
cv2.imshow('name',img)
cv2.waitKey(0)
cv2.destroyAllWindows()
cv_show('img1',img1)
cv_show('img2',img2)
sift=cv2.xfeatures2d.SIFT_create()
kp1,des1=sift.detectAndCompute(img1,None)#检测关键点并计算特征向量(des)
kp2,des2=sift.detectAndCompute(img1,None)
#crossCheck表示两个特征点要互相匹,例如A中的第i个特征点与B中的第j个特征点最近的,并且B中的第j个特征点到A中的第i个特征点也是
#NORM_L2:归一化数组的(欧几里得距离),如果其他特征计算方法需要考虑不同的匹配计算方式。
bf=cv2.BFMatcher(crossCheck=True)#BF:蛮力匹配的缩写 
1対1の試合
- distance : 一致する 2 つの特徴点間のユークリッド距離を示し、値が小さいほど 2 つの特徴点が近くなります。
cv2.drawMatches(img1, kp1, img2, kp2, matches_10[:10], None, flags=2):画像の要点をつなぎます。
matches=bf.match(des1,des2)
matches=sorted(matches,key=lambda x:x.distance)#排个序:最接近的、第二接近的、第三……
img3=cv2.drawMatches(img1,kp1,img2,kp2,matches[:10],None,flags=2)#把关键点连在一起
cv_show('img3',img3)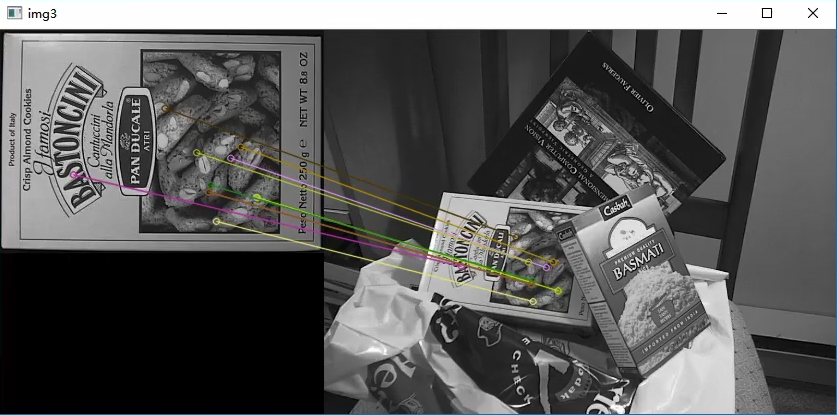
k ベストマッチ
bf=cv2.BFMatcher()#特征匹配算法
matches=bf.knnMatch(des1,des2,k=2)#第一张图中的点对应第二张图中两个特征点
good=[]
for m,n in matches:
if m.distance<0.75*n.distance:#过滤:这里m, n分别表示两个特征点,如果两个特征点distance比值小于0.75,则保留该特征匹配点。
good.append([m])
img3=cv2.drawMatchesKnn(img1,kp1,img2,kp2,good,None,flags=2)#对图像的关键点进行连线操作。
cv_show('img3',img3)操作をより速く完了する必要がある場合は、 cv2.FlannBasedMatcher の使用を試みることができます。

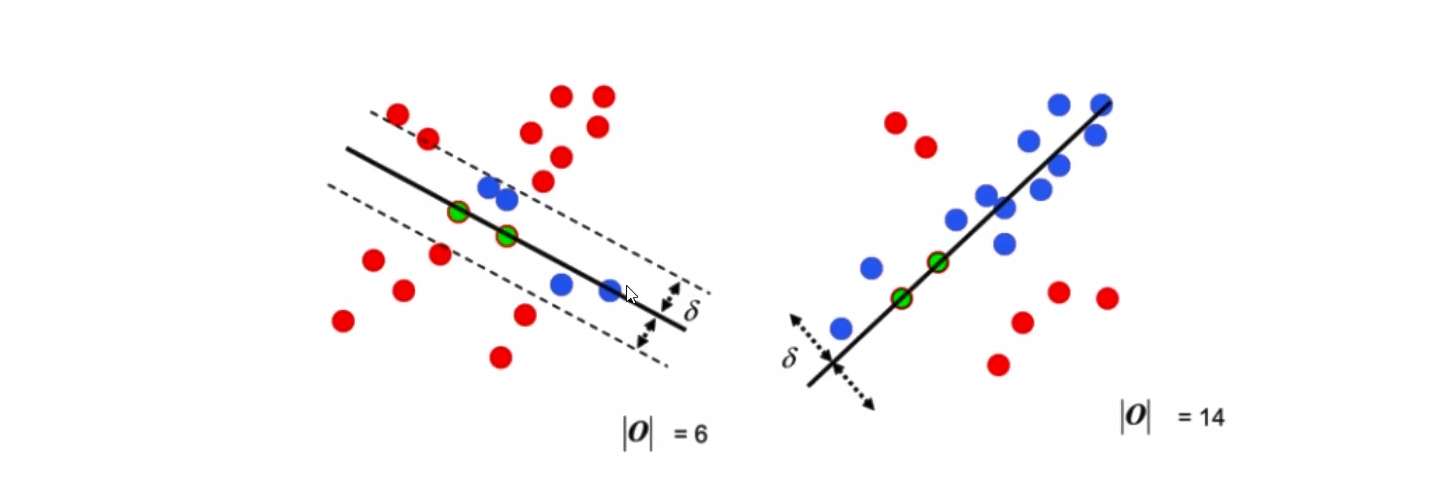
ランダム サンプリング コンセンサス アルゴリズム (ランダム サンプル コンセンサス、RANSAC)
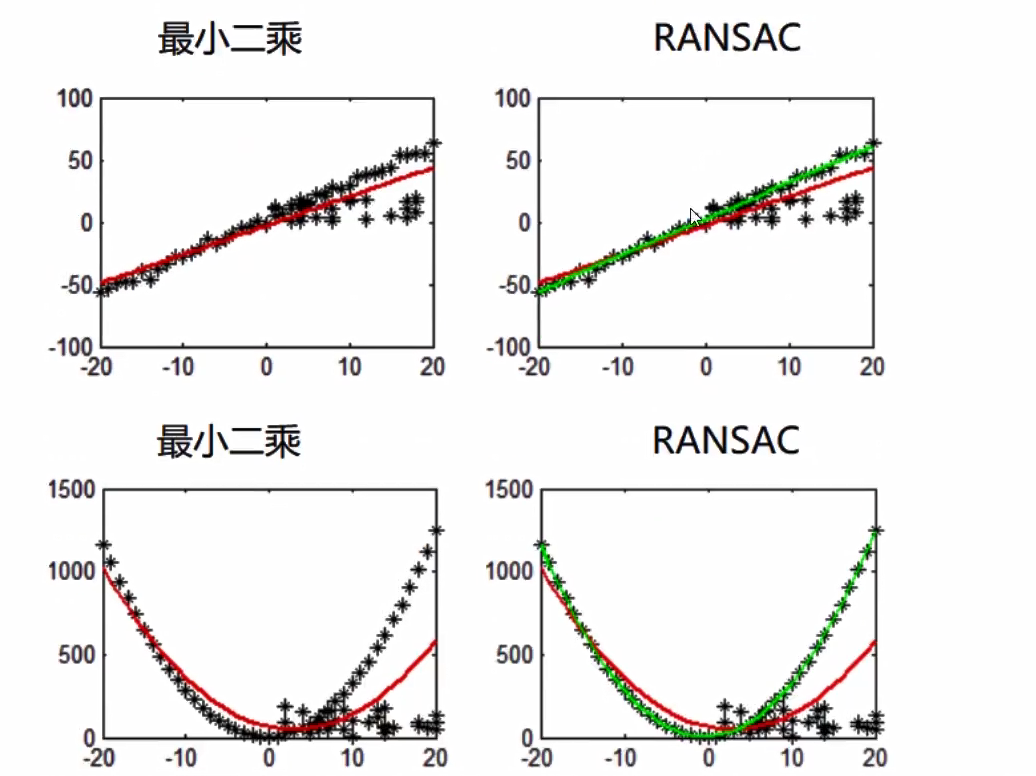
許容範囲を指定してフィッティングの最初のサンプル点を選択し、反復を続けます。
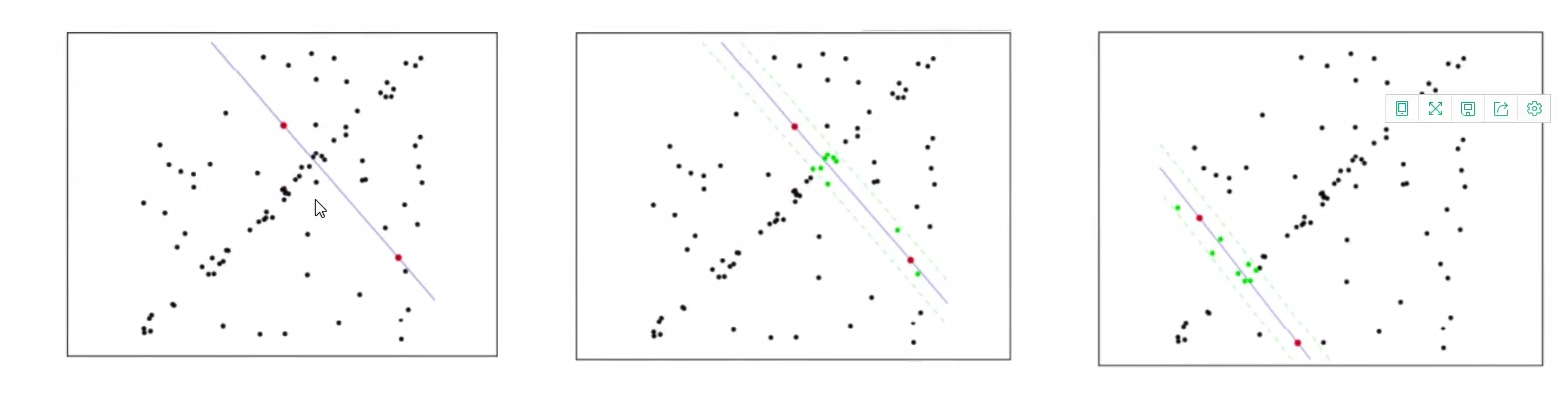
各フィッティングの後、許容範囲内に対応する数のデータ ポイントが存在し、最大数のデータ ポイントを持つケースが最終的なフィッティング結果となります。
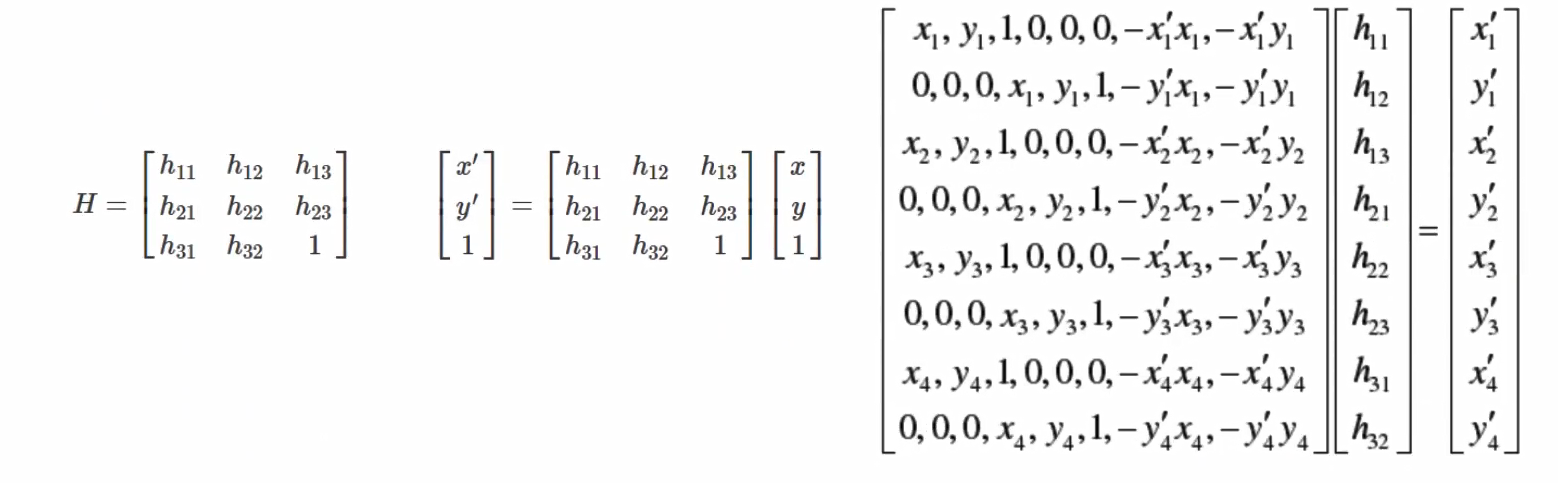
ホモグラフィー行列
- 画像の射影変換
- 正規化が簡単なので、最後の値は 1 に設定されます。
- 8 つの値には 8 つの方程式が必要、4 つの点のペアが必要、(x, y) は 2 つの方程式を形成できます
- 誤ったポイントを防ぐために、最初にRANSACを使用してフィルタリングする必要があります
実践演習:画像の貼り合わせ方法
- 画像の特徴抽出には重要なポイント(ふるい分け)が必要
- 特定の画像の H 行列を見つけて、対応する結果を取得します
- つなぎ合わせる
pycharm 実行コード
画像ステッチ.py
from Stitcher import Stitcher
import cv2
def resize(img):
height, width = img.shape[:2]
size = (int(width*0.4), int(height*0.4))
img_resize = cv2.resize(img, size, interpolation=cv2.INTER_AREA)
return img_resize
# 读取拼接图片
imageA = cv2.imread("bag_1.jpg")
imageB = cv2.imread("bag_2.jpg")
a = resize(imageA)
b = resize(imageB)
# 把图片拼接成全景图
stitcher = Stitcher()
(result, vis) = stitcher.stitch([a, b], showMatches=True)
# 显示所有图片
cv2.imshow("Image A", a)
cv2.imshow("Image B", b)
cv2.imshow("Keypoint Matches", vis)
cv2.imshow("Result", result)
cv2.waitKey(0)
cv2.destroyAllWindows()
ステッチャー.py
import numpy as np
import cv2
class Stitcher:
# 拼接函数
def stitch(self, images, ratio=0.75, reprojThresh=4.0, showMatches=False):
# 获取输入图片
(imageB, imageA) = images
# 检测A、B图片的SIFT关键特征点,并计算特征描述子
(kpsA, featuresA) = self.detectAndDescribe(imageA)
(kpsB, featuresB) = self.detectAndDescribe(imageB)
print("kpsA, featuresA", (kpsA, featuresA))
# 匹配两张图片的所有特征点,返回匹配结果
M = self.matchKeypoints(kpsA, kpsB, featuresA, featuresB, ratio, reprojThresh)
print("M", M)
# 如果返回结果为空,没有匹配成功的特征点,退出算法
if M is None:
return None
# 否则,提取匹配结果
# H是3x3视角变换矩阵
(matches, H, status) = M
# 将图片A进行视角变换,result是变换后图片
result = cv2.warpPerspective(imageA, H, (imageA.shape[1] + imageB.shape[1], imageA.shape[0]))
self.cv_show('result', result)
# 将图片B传入result图片最左端
result[0:imageB.shape[0], 0:imageB.shape[1]] = imageB
self.cv_show('result', result)
# 检测是否需要显示图片匹配
if showMatches:
# 生成匹配图片
vis = self.drawMatches(imageA, imageB, kpsA, kpsB, matches, status)
# 返回结果
return (result, vis)
# 返回匹配结果
return result
def cv_show(self, name, img):
cv2.imshow(name, img)
cv2.waitKey(0)
cv2.destroyAllWindows()
def detectAndDescribe(self, image):
# 将彩色图片转换成灰度图
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 建立SIFT生成器
descriptor = cv2.xfeatures2d.SIFT_create()
# 检测SIFT特征点,并计算描述子
(kps, features) = descriptor.detectAndCompute(image, None)
# 将结果转换成NumPy数组,即用数组来表示特征点的坐标。
kps = np.float32([kp.pt for kp in kps])
# 返回特征点集,及对应的描述特征
return (kps, features)
def matchKeypoints(self, kpsA, kpsB, featuresA, featuresB, ratio, reprojThresh):
# 建立暴力匹配器
matcher = cv2.BFMatcher()
# 使用KNN检测来自A、B图的SIFT特征匹配对,K=2
rawMatches = matcher.knnMatch(featuresA, featuresB, 2)
matches = []
for m in rawMatches:
# 当最近距离跟次近距离的比值小于ratio值时,保留此匹配对
if len(m) == 2 and m[0].distance < m[1].distance * ratio:
# 存储两个点在featuresA, featuresB中的索引值
matches.append((m[0].trainIdx, m[0].queryIdx))
# 当筛选后的匹配对大于4时,计算视角变换矩阵
if len(matches) > 4:
# 获取匹配对的点坐标
ptsA = np.float32([kpsA[i] for (_, i) in matches])
ptsB = np.float32([kpsB[i] for (i, _) in matches])
# 计算视角变换矩阵
(H, status) = cv2.findHomography(ptsA, ptsB, cv2.RANSAC, reprojThresh)
# 返回结果
return (matches, H, status)
# 如果匹配对小于4时,返回None
return None
def drawMatches(self, imageA, imageB, kpsA, kpsB, matches, status):
# 初始化可视化图片,将A、B图左右连接到一起
(hA, wA) = imageA.shape[:2]
(hB, wB) = imageB.shape[:2]
vis = np.zeros((max(hA, hB), wA + wB, 3), dtype="uint8")
vis[0:hA, 0:wA] = imageA
vis[0:hB, wA:] = imageB
# 联合遍历,画出匹配对
for ((trainIdx, queryIdx), s) in zip(matches, status):
# 当点对匹配成功时,画到可视化图上
if s == 1:
# 画出匹配对
ptA = (int(kpsA[queryIdx][0]), int(kpsA[queryIdx][1]))
ptB = (int(kpsB[trainIdx][0]) + wA, int(kpsB[trainIdx][1]))
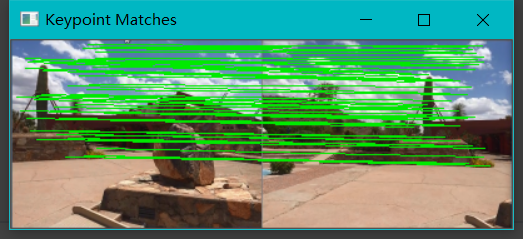
cv2.line(vis, ptA, ptB, (0, 234, 0), 1)
# 返回可视化结果
return vis
具体的な解釈手順は次のとおりです。code_shuyeah のブログと一致するパノラマ ステッチング機能 - パノラマとマップ ポイントを一致させるための CSDN blog_code
具体的な効果



エラー1が発生しました
カスタム .py ファイルがモジュールをインポートすると、「ModuleNotFoundError: 名前付きモジュールがありません」と報告されます。
次のコードを実行するとエラーが発生します
from Stitcher import Stitcher
import エラーは次のとおりです。
ModuleNotFoundError: モジュール名がありません

解決策:
通常、import ステートメントを使用してモジュールがインポートされると、Python は指定されたモジュール ファイルを次の順序で検索します。
- 現在のディレクトリ、つまり現在実行中のプログラム ファイルが存在するディレクトリを検索します。
- PYTHONPATH (環境変数) の下の各ディレクトリを検索します。
- Python のデフォルトのインストール ディレクトリで見つけます。
「Python が指定されたモジュールを見つけることができません」を解決するには、次の 3 つの方法があります。
- モジュール ファイルの保存場所へのフル パスを一時的に sys.path に追加します。
- sys.path 変数にすでに含まれているモジュール ロード パスにモジュールを置きます。
- path システム環境変数を設定します。
具体的な方法: Python でモジュールをインポートする 3 つの方法 (超詳細)
エラー2が発生する
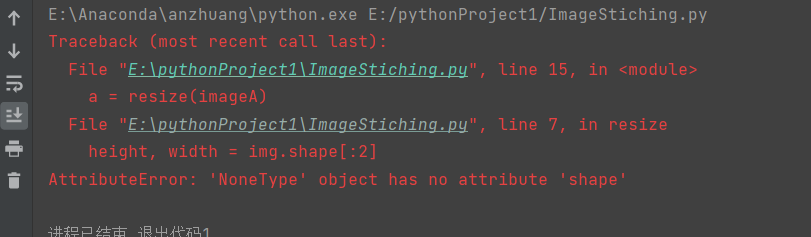
理由分析: NoneType が画像を読み取れない可能性があります。画像を読み取るパスが正しいかどうかを確認できます