1. Introducción
PID es la abreviatura en inglés de Proporcional (proporcional), Integral (integral) y Diferencial (diferencial). Como sugiere el nombre, el algoritmo de control PID es un algoritmo de control automático que combina enlaces proporcionales, integrales y diferenciales. Es el algoritmo de control más maduro y más utilizado en sistemas continuos. Este algoritmo de control apareció en las décadas de 1930 y 1940. Es adecuado para ocasiones en las que el modelo del objeto controlado no esté claro. La experiencia operativa real y el análisis teórico muestran que cuando se utiliza esta ley de control para controlar muchos procesos industriales, se pueden obtener resultados satisfactorios. La esencia del control PID es realizar operaciones de acuerdo con la relación funcional de proporción, integral y diferencial de acuerdo con el valor de desviación de la señal de entrada, y los resultados de la operación se utilizan para controlar la salida.
A través de la introducción de este párrafo, ¿todavía es difícil para las personas que no han estudiado el algoritmo PID comprender qué puede hacer el algoritmo PID? ¿Qué tipo de efecto de control puede ejercer? A continuación se presentarán algunos ejemplos para explicar en detalle la función y el efecto de control de comprender el control PID. Después de comprender PID, deduciremos el algoritmo PID en detalle.
2. Control de conmutación
2.1 Breve descripción de la cantidad de interruptores
Ahora tenemos una tarea que requiere controlar un calentador para mantener la temperatura de una olla con agua en 50grados. Deberías pensar que es simple. Cuando la temperatura del agua es inferior a 50 grados, simplemente enciende el calentador y deja que caliente el agua. Si la temperatura del agua es superior a 50 grados, apaga el calentador y deja de calentar el agua. ¿No es suficiente? Sí, cuando no existen requisitos de alta precisión para la variable controlada (la variable controlada aquí es la temperatura del agua), de hecho es posible utilizar un interruptor , como encender o apagar , para controlar el objeto controlado.
2.2 Desventajas de cambiar la cantidad
¿Pero qué pasa si el objeto de control es un coche? Al mismo tiempo, si quiero que la velocidad del coche se mantenga en 50 km/h, ¿puedo seguir utilizando el control por interruptor ? Para este tipo de preguntas, podemos imaginar que si la computadora del control de crucero del automóvil mide la velocidad del vehículo en un momento determinado 45km/h. Debido a que era inferior 50km/ha la velocidad objetivo, inmediatamente le pidió al motor que acelerara, como resultado, el motor recibió una orden de aceleración al 100% y el automóvil aceleró bruscamente 60km/h. En este momento, debido a que la velocidad es superior a , 50km/hla computadora emite un comando para frenar nuevamente. La experiencia de conducción obtenida utilizando dicho método de control es extremadamente pobre. El resultado final de permitir que los pasajeros utilicen un sistema de este tipo es, por supuesto, pasajeros enojados.
Por lo tanto, en la mayoría de las situaciones, es demasiado sencillo utilizar un valor de interruptor para controlar una cantidad física. Debido a que el microcontrolador y el sensor no son infinitamente rápidos, el control de adquisición requiere tiempo (cuando el sensor detecta que la temperatura ha aumentado, la temperatura real ya es mucho más alta que la temperatura objetivo, y cuando el sensor detecta que la temperatura ha disminuido, la temperatura real ya es mucho mayor que la temperatura objetivo). La temperatura ya está muy por debajo de la temperatura objetivo), por lo que hay un retraso en la percepción. Y el objeto controlado tiene inercia. Por ejemplo, si desconectas un calentador, su calor residual (es decir, la existencia de inercia térmica) seguirá haciendo que la temperatura del agua siga aumentando durante un período de tiempo, por lo que la mayor parte del tiempo no puede mantener un estado estable.
2.3 Control continuo
En comparación con la escasez de cantidad de conmutación, en este momento se requiere un algoritmo que pueda acercar rápidamente la cantidad física que debe controlarse al valor objetivo y, al mismo tiempo, pueda prever la tendencia cambiante de esta cantidad. puede eliminar algunos factores como la disipación de calor y la resistencia. Errores estáticos causados por factores como (por ejemplo, la velocidad de calentamiento es igual a la velocidad de enfriamiento. Incluso si hay una diferencia de temperatura, continuar calentando con potencia constante no aumentará la temperatura). Como resultado, los matemáticos de esa época inventaron este algoritmo duradero, que es el algoritmo de control PID.
3. control PID
3.1 Principio de control
El parámetro PID es su nombre, por lo que, como sugiere el nombre, el algoritmo PID tiene tres parámetros, a saber, P (proporcional), I (integral) y D (diferencial). En aplicaciones prácticas, estos tres parámetros generalmente se definen como Kp ( proporcional), Ki (integral), Kd (diferencial). Estos tres parámetros corresponden a diferentes efectos regulatorios. Nota: Aunque PID tiene tres parámetros, nos permite usar solo uno de ellos, o solo dos de ellos, o se pueden usar los tres parámetros al mismo tiempo para formar un sistema de control.
3.1.1 Ajuste proporcional de Kp
p en Kp es proporción, es decir, control proporcional. El efecto de control es el más obvio y el principio es el más simple. Por ejemplo, la variable controlada aquí es la temperatura del agua. Como variable controlada, la temperatura del agua tiene el valor de temperatura actual y el valor de temperatura objetivo que esperamos.
Cuando la diferencia entre el valor de temperatura actual y el valor de temperatura objetivo no sea grande, deje que el calentador se caliente suavemente .
Si por alguna razón la temperatura baja mucho, enciende un poco más fuerte la calefacción .
Si la temperatura actual es mucho más baja que la temperatura objetivo, encienda el calentador a máxima potencia para que la temperatura del agua se acerque a la temperatura objetivo lo antes posible.
Ésta es la función de control proporcional de P. En comparación con el método de control de conmutación, es obviamente más elegante. Cuanto mayor es P, más radical es el efecto de ajuste, y cuanto menor es P, más conservador es el efecto de ajuste. Con un control insuficiente del enlace P, el sistema no puede alcanzar la estabilidad y la temperatura del agua aún ronda los 50 grados.
3.1.2 Ajuste del diferencial Kd
d en Kd es diferencial, es decir, control diferencial. Como se mencionó anteriormente, la estabilidad no se puede lograr utilizando únicamente el sistema de control proporcional y la temperatura aún fluctúa. Esto es similar a un peso que cuelga de un resorte: cuando el resorte y el peso estén en una posición equilibrada, tire del resorte con fuerza y luego suéltelo. En este punto vibrará. Como la resistencia es muy pequeña, puede continuar oscilando durante mucho tiempo antes de recuperar su posición de equilibrio.
Pero si el resorte y el peso están sumergidos en agua, también cuando el resorte y el peso estén en la posición de equilibrio, tire con fuerza del resorte y luego suéltelo. En este caso, el resorte y el peso tardan poco tiempo en volver a la posición de equilibrio debido a la resistencia del agua.
Por lo tanto, necesitamos un efecto de control para hacer que la velocidad de cambio de la cantidad física controlada tienda a 0, que es similar al efecto amortiguador del agua sobre el manantial mencionado anteriormente. Porque, cuanto más nos acercamos al objetivo, el efecto de control de P se vuelve menor. Cuanto más te acerques al objetivo, más suave será la acción de P. Sin embargo, hay muchos factores internos o externos que hacen que el volumen de control oscile en un rango pequeño.
Por lo tanto, la función de D en PID es hacer que la velocidad de la cantidad física tienda a 0. Siempre que la cantidad controlada tiemble, D ejercerá fuerza en la dirección opuesta y hará todo lo posible para frenar el cambio (jitter). Cuanto mayor sea D, más fuerte será la fuerza de frenado (amortiguación) en la dirección opuesta.
De hecho con control proporcional y diferencial todo el sistema puede ser estable, en este caso ¿por qué se necesita control integral?, permítanme continuar con esta pregunta.
3.1.3 Ajuste integral Ki
i en Ki es integral, es decir, control integral. Como se mencionó anteriormente, con control proporcional y diferencial, todo el sistema puede ser estable. Ahora, si el dispositivo de calentamiento que solo usa control proporcional y diferencial se lleva a un lugar muy frío para hervir agua, el agua debe hervirse a 50 grados. . Bien, ahora,
bajo la acción del control de proporción de P, la temperatura del agua aumentará lentamente. No fue hasta que la temperatura del agua subió a 45 grados que se descubrió un problema. La temperatura del agua no pudo subir más y se mantuvo en 45 grados. ¿A qué se debe esto? Ahora analicemos este problema juntos y los resultados son los siguientes.
Debido a que la temperatura del agua ha alcanzado los 45 grados, el hermano P piensa así: estoy muy cerca del objetivo, solo necesito calentarlo un poco. Pero el clima es demasiado frío y la velocidad de disipación del agua es igual a la velocidad del calentamiento suave controlado por P. En ese momento, el hermano D pensó de esta manera: el calentamiento y la disipación de calor son iguales, la temperatura no fluctúa y parece que no necesito ajustarme. Como resultado, la temperatura del agua permanece en 45 grados para siempre y no puede seguir subiendo a 50 grados.
Según el sentido común, todos sabemos que para la misma tasa de calentamiento y tasa de disipación de calor ( este es el error de estado estacionario, el error de estado estacionario ocurre cuando el sistema pasa de un estado estacionario a un nuevo estado estacionario, o cuando el El sistema se perturba y se reequilibra (desviación ), pero para continuar aumentando la temperatura, se debe aumentar aún más la potencia de calentamiento ( eliminando el error de estado estacionario ). Pero esto encontrará otro problema: ¿cuánta potencia se debe aumentar?
Los científicos ya han pensado en este problema y han fijado una cantidad integral. Mientras exista la desviación, la desviación se integrará (acumulará) continuamente y se reflejará en la intensidad del ajuste.
De esta forma, aunque no haya mucha diferencia entre 45 grados y 50 grados, el tiempo irá cambiando a medida que pase el tiempo, mientras no se haya alcanzado la temperatura objetivo, la integral seguirá aumentando. En este momento, el sistema de control se dará cuenta lentamente de que no se ha alcanzado la temperatura objetivo y es hora de aumentar la potencia.
Después de alcanzar la temperatura objetivo, suponiendo que la temperatura no fluctúe, el valor integrado no cambiará (debido a que la integración de 0 continúa, el resultado seguirá siendo 0). En este momento, la potencia de calefacción sigue siendo igual a la potencia de refrigeración, pero la temperatura se mantiene constante en 50 grados.
Cuanto mayor sea el valor de I, mayor será el coeficiente multiplicado durante la integración y más obvio será el efecto de integración. Por lo tanto, la función de I es reducir el error en condiciones estáticas y acercar la cantidad física controlada lo más posible al valor objetivo que establecemos. Necesito prestar atención a un problema al usarlo: es necesario establecer el límite de puntos. Porque cuando recién se inicia la calefacción, la temperatura actual debe ser bastante diferente de nuestro valor de temperatura establecido. Si no se establece el límite integral, la integral será demasiado grande y, en última instancia, será difícil controlar el sistema.
3.2 Curva de respuesta al escalón PID
Los métodos de trabajo y principios de los tres tipos de ajustes PID se han explicado anteriormente. Ahora observemos los efectos de respuesta de ajuste de los tres tipos de ajustes.
4. Escenarios de aplicación
De la introducción anterior, podemos saber que el PID puede desempeñar su papel en situaciones en las que una cantidad física controlada necesita ser controlada de manera estable, como mantener el equilibrio, estabilizar la temperatura, estabilizar la velocidad, etc. Las aplicaciones típicas incluyen control de actitud de cohetes, control de puntería de artillería de barcos, control de crucero de automóviles, control de velocidad de motores, dirección de vehículos autónomos, control de vuelo estacionario de drones, estabilizadores de cámaras, cardanes de cámaras y líquidos en la industria, control de bits, etc.
5. Derivación de la fórmula PID
Antes de esto, hemos analizado en detalle el principio del control PID y tenemos una cierta comprensión de la teoría del control PID, por lo que analicemos específicamente la derivación y discretización de las expresiones matemáticas PID.
5.1 Definición del sistema de control
En el sistema de control, la desviación de control e se refiere al resultado de comparar el valor establecido w con el valor de salida real y, es decir,
mi = w − ye = wymi=w−y
El llamado regulador PID es un tipo de regulador que forma la cantidad de control de acuerdo con la combinación lineal de las operaciones de proporción (P), integral (I) y diferencial (D) de la desviación e, como se muestra en la siguiente figura. .
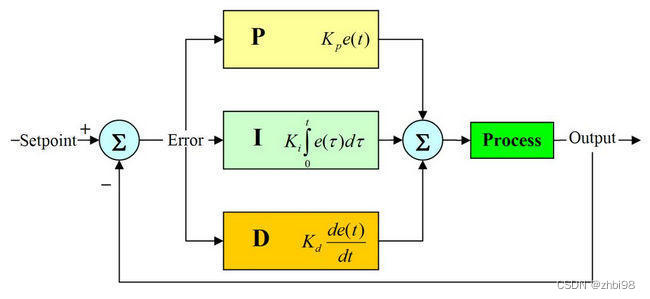
Como se mencionó anteriormente, en aplicaciones prácticas, la estructura del regulador PID se puede cambiar de manera flexible de acuerdo con las características y requisitos de control del objeto controlado, y algunos de los enlaces se toman para formar la ley de control para formar varios controladores. Por ejemplo, un regulador proporcional (P), un regulador proporcional-integral (PI) o un regulador proporcional-derivado (PD).
5.2 Análisis de varios tipos de reguladores
5.2.1 Regulador proporcional
La ley de control del regulador proporcional es
tu = K mi + tu 0 tu=Ke+u_{0}tu=Cuando+tu0
KK en la expresiónK es el coeficiente de proporción (es decir, Kp en la figura),u 0 u0u 0 es el punto de referencia de la cantidad de control, es decir,e = 0 e=0mi=Función de control en 0 (como apertura inicial de la válvula, señal eléctrica de referencia, etc.). Las ventajas del control proporcional son que es simple (es el regulador más simple), pero es rápido y puede ajustar la desviaciónee.e da una respuesta inmediata. Una vez que ocurre la desviación, el regulador toma medidas inmediatamente para hacer que la cantidad controlada cambie en la dirección de reducir la desviación.
El efecto de control del regulador proporcional depende del coeficiente proporcionalKKkkkk __Cuanto mayor es K , más fuerte es el efecto del regulador, lo que resulta beneficioso para reducir la diferencia estática del sistema. Para objetos de control con propiedades de autoequilibrio, al regulador proporcional le resulta difícil eliminar el error estático del sistema. Además, el coeficiente proporcionalKKK no se puede aumentar infinitamente. cuandokkCuando el valor de K es demasiado grande, el rendimiento dinámico del sistema se deteriorará, provocando oscilaciones del sistema de control y, en casos graves, el sistema quedará fuera de control.
5.2.2 Regulador integral proporcional
Sobre la base del regulador proporcional, se agrega un enlace integral para formar un regulador proporcional-integral (PI) cuya ley de control es:
tu = K ( mi + 1 T yo ∫ 0 tedt ) + tu 0 u=K(e+\frac{1}{T_{i}}\int_0^te dt)+u_{0}tu=K ( mi+tyo1∫0tedt ) _ _+tu0
En la expresión T i T_{i}tyose llama tiempo de integración, subíndice iii significa integral. El vínculo integral en el regulador PI tiene un efecto acumulativo en la desviación. Siempre que la desviacióneeSi e no es cero, afectará la cantidad de control a través del efecto acumulativo y reducirá la desviación. Hasta que la desviación llegue a cero, el efecto de control ya no cambiará y el sistema alcanzará un estado estable. Por lo tanto, la adición del enlace integral ayuda a eliminar el error estático del sistema.
Tiempo de integraciónT i T_{i}tyoCuanto más pequeño es, más fuerte es el vínculo de integración. Tiempo de integración T i T_{i}tyoCuanto más grande es, más débil es el vínculo de integración. Esto es beneficioso para reducir el exceso del sistema y mejorar la estabilidad del sistema, pero el proceso de eliminar el error estático del sistema será más lento.
Tiempo de integración T i T_{i}tyoLa selección se puede basar en las características del objeto controlado. Para objetos controlados como la presión de la tubería y el caudal con poca histéresis, se puede seleccionar un tiempo de integración más pequeño T i T_{i} .tyo, para objetos con histéresis fuerte, como la temperatura, el área opcional es mayor T i T_{i}tyo。
5.2.3 Regulador proporcional-integral-derivado
Al agregar un enlace diferencial sobre la base del regulador integral proporcional, se forma un regulador diferencial integral proporcional (PID). La ley de control es:
u = K ( e + 1 T i ∫ 0 tedt + T ddedt ) + u 0 u=K(e+\frac{1}{T_{i}}\int_0^te dt+T_{d}\frac{de} {dt})+u_{0}tu=K ( mi+tyo1∫0te d t+tred tde)+tu0
T d T_{d} en la expresióntrese llama tiempo diferencial, subíndice ddd se refiere al diferencial, y la salida del enlace diferencial agregado es
u = K ( 0 + 0 + T ddedt ) + 0 u=K(0+0+T_{d}\frac{de}{dt})+0tu=k ( 0+0+tred tde)+0
es decir, ud = KT ddedt, es decir, u_{d}=KT_{d}\frac{de}{dt}Inmediatamente _re=kt _red tde
El enlace diferencial puede responder rápidamente a cualquier cambio en la desviación y producir un efecto de control para ajustar la salida del sistema y evitar cambios en la desviación. Cuanto más rápido cambia la desviación, la salida del enlace diferencial ud u_{d}tureCuanto mayor sea el valor, mayor será la cantidad de corrección de retroalimentación.
El efecto diferencial ayuda a reducir el exceso del sistema, superar la oscilación del sistema y estabilizarlo. El enlace diferencial acelera la acción del sistema y reduce el tiempo de ajuste, mejorando así el rendimiento dinámico del sistema.
6. Digitalización del algoritmo PID
El sistema de control por computadora digital es esencialmente un sistema de control de muestreo que solo puede calcular mediciones basándose en el valor de desviación en el momento del muestreo. Por lo tanto, necesitamos discretizar la fórmula del regulador diferencial integral proporcional y reemplazar la ecuación diferencial del sistema continuo con una ecuación en diferencias digital.
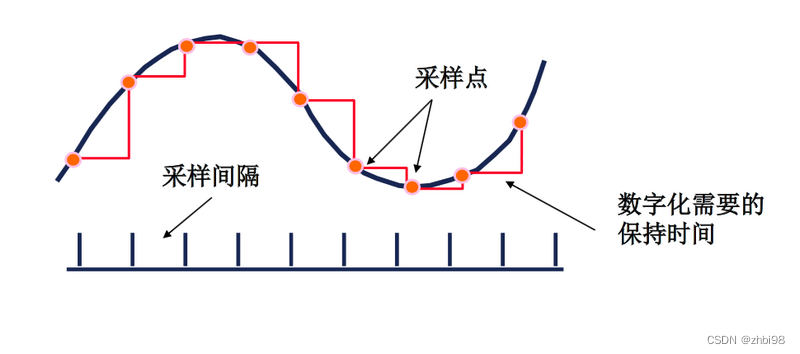
Este ejemplo típico es el osciloscopio digital que se usa ampliamente hoy en día. Un osciloscopio digital no puede cuantificar directamente señales analógicas. Entonces, si necesita cuantificar una señal analógica como una onda sinusoidal, ¿cómo lo hace un osciloscopio digital? El osciloscopio digital puede recolectar un valor de voltaje en la señal de onda sinusoidal en un momento determinado a través del convertidor analógico a digital (ADC), luego, cuando el muestreo continúa en un momento determinado a una velocidad determinada, se pueden obtener una serie de puntos de muestreo. ser obtenido Estos puntos de muestreo Es decir, un conjunto de valores de voltaje que constituyen una señal de onda sinusoidal. Convierta estos valores de voltaje en coordenadas de pantalla y conecte estas coordenadas usando segmentos de línea para obtener una imagen cercana a la señal de onda sinusoidal Por lo tanto, mientras la frecuencia de muestreo sea mayor (la frecuencia de muestreo tiende a (cerca del infinito), más cerca estará la imagen obtenida de la verdadera continuidad. Ésta es la idea de límite y diferencial en matemáticas .
6.1 Digitalización
En el sistema de control, se supone que la computadora cada vez Δt ΔtΔt recoge la señal de control una vez y envía la señal de control una vez al actuador del objeto controlado, Δt ΔtΔtGeneralmente usamosTT _T representa, llamado período de muestreo.
Supongamos que en el tiempo de muestreot = i ⋅ Δ t = i ⋅ T ( i es el número de muestreo, i = 0 , 1 , 2 , 3 , . . . , n ) t=i·Δt=i·T (i es el número de muestreo, i=0,1,2,3,...,n)t=yo ⋅Δt _=yo ⋅T ( i es el número de secuencia de muestreo ,i=0 ,1 ,2 ,3 ,... ,n ) , aquí el número de muestreoiii es el número de muestreo, período de muestreoTTT es el tiempo que dura (toma) cada muestreo, por lo quet = i ⋅ Δ t = i ⋅ T t=i·Δt=i·Tt=yo ⋅Δt _=yo ⋅T es sumar el tiempo de cada muestra para obtener la duración total desde el principio hasta el presente, que es similar a integrar el tiempo.
El valor de desviación ese ( i T ) e(iT)e ( i T ),简记为e ( i ) e(i)e ( i )或no noe i , se refiere al valor de desviación de la hora actual (número de secuencia de muestreo x período = hora actual).
La cantidad de control esu ( i T ) u(iT)u ( i T )简记为u (i) u(i)tu ( yo ) oruiuiu i , es decir, obtenemos lo siguiente
ei = mi (i) = mi (i T), ui = u (i) = u (i T) e_{i} = e(i)=e(iT), u_{i} = u(i)= tu(eso)miyo=mi ( yo )=mi ( yo T ) ,tuyo=tú ( yo )=tú ( yo T )
Cuando el período de muestreo TTCuando T es lo suficientemente pequeño, se pueden utilizar métodos de cálculo numérico para aproximar infinitamente los términos integral y diferencial de PID, y se puede obtener la siguiente aproximación
Parte de puntos
∫ 0 tedt ≈ ∑ j = 0 es decir ( j ) ⋅ Δ t \int_0^te dt \approx \sum_{j=0}^ie(j) · Δt∫0te d t≈j = 0∑yomi ( j ) ⋅Δt _
即 ≈ ∑ j = 0 es decir ( j ) ⋅ T 即 \approx \sum_{j=0}^ie(j) · TAhora mismo≈j = 0∑yomi ( j ) ⋅t
即 ≈ T ⋅ ∑ j = 0 es decir ( j ) 即 \approx T·\sum_{j=0}^ie(j)Ahora mismo≈T ⋅j = 0∑yomi ( j )
即 ≈ T ⋅ ∑ j = 0 iej 即 \approx T·\sum_{j=0}^i e_{j}Ahora mismo≈T ⋅j = 0∑yomij
parte diferencial
de ( t ) dt ≈ Δ e Δ t \frac{de(t)}{dt} \approx \frac{Δe}{Δt}d tde(t)≈Δt _Δe_ _
即 ≈ e ( i ) − e ( i − 1 ) Δ t 即 \approx \frac{e(i)-e(i-1)}{Δt}Ahora mismo≈Δt _mi ( yo )−mi ( yo−1 )
即 ≈ e ( i ) − e ( i − 1 ) T 即 \approx \frac{e(i)-e(i-1)}{T}Ahora mismo≈tmi ( yo )−mi ( yo−1 )
即 ≈ ei − ei − 1 T 即 \approx \frac{e_{i}-e_{i-1}}{T}Ahora mismo≈tmiyo−miyo − 1
Entonces, cuando el período de muestreo TTCuando T es lo suficientemente pequeño, el proceso controlado está muy cerca del proceso de control continuo, situación que se denomina control cuasi.
6.2 PID posicional
Ahora sustituimos las expresiones de las partes integrales y diferenciales que han sido digitalizadas en el punto anterior en la siguiente expresión, reemplazando las partes integrales y diferenciales de la siguiente expresión.
u = K ( e + 1 T i ∫ 0 tedt + T ddedt ) + u 0 u=K(e+\frac{1}{T_{i}}\int_0^te dt+T_{d}\frac{de} {dt})+u_{0}tu=K ( mi+tyo1∫0te d t+tred tde)+tu0
Primero reemplace la expresión de la parte integral de la siguiente manera
ui = K ( ei + 1 T i ⋅ T ⋅ ∑ j = 0 iej + T ddedt ) + u 0 u_{i}=K(e_{i}+\frac{1}{T_{i}}·T· \sum_{j=0}^i e_{j}+T_{d}\frac{de}{dt})+u_{0}tuyo=K ( miyo+tyo1⋅T ⋅j = 0∑yomij+tred tde)+tu0
Luego reemplace la expresión en la parte diferencial de la siguiente manera
ui = K ( ei + 1 T i ⋅ T ⋅ ∑ j = 0 iej + T d ⋅ ei − ei − 1 T ) + u 0 u_{i}=K(e_{i}+\frac{1}{T_ {i}}·T·\sum_{j=0}^i e_{j}+T_{d}·\frac{e_{i}-e_{i-1}}{T})+u_{0}tuyo=K ( miyo+tyo1⋅T ⋅j = 0∑yomij+tre⋅tmiyo−miyo − 1)+tu0
Finalmente, ordénalo y obtén
ui = K [ ei + TT i ⋅ ∑ j = 0 iej + T d T ⋅ ( ei − ei − 1 ) ] + u 0 u_{i}=K[e_{i}+\frac{T}{T_{ i}}·\sum_{j=0}^i e_{j}+\frac{T_{d}}{T}·(e_{i}-e_{i-1})]+u_{0}tuyo=k [ miyo+tyot⋅j = 0∑yomij+ttre⋅( miyo−miyo − 1)]+tu0
Dado que el valor de salida de la expresión ui u_{i}tuyoCorresponde uno a uno con la posición del actuador (como la apertura de la válvula), por lo que esta fórmula generalmente se denomina fórmula de control PID de posición digital.
En el sistema de control, si el actuador usa una válvula reguladora, la cantidad de control corresponde a la apertura de la válvula, que representa la posición del actuador. En este momento, el controlador debe usar un algoritmo de control PID de posición digital.
6.3 PID incremental
¿Qué es el PID incremental? De la derivación anterior, sabemos que el controlador PID posicional puede generar un tamaño específico de cantidad de control para controlar el ángulo de apertura y cierre de la válvula. Por ejemplo, la salida de 30 grados controla que la válvula se abra 30 grados y la salida de 0 grados controla el cierre de la válvula. Esta cantidad de control se llama cantidad de control absoluto. El concepto opuesto al volumen de control absoluto es el volumen de control relativo. El llamado volumen de control relativo significa que el valor de control emitido por PID es un valor relativo. Por ejemplo, la salida de 30 grados controla que la válvula se abra 30 grados, y el volumen de control absoluto La salida de -30 grados controla el cierre de la válvula, por lo que el valor relativo es la cantidad de cambio con respecto al valor anterior. Según la idea de valores relativos, el PID incremental se puede derivar del PID posicional.
De acuerdo con la derivación PID posicional anterior, se puede ver que ui u_ {i}tuyoes (nota T i T_{i}tyosubíndice iii se refiere a la integral, no al índice de muestreo)
ui = K [ ei + TT i ⋅ ∑ j = 0 iej + T d T ⋅ ( ei − ei − 1 ) ] + u 0 u_{i}=K[e_{i}+\frac{T}{T_{ i}}·\sum_{j=0}^i e_{j}+\frac{T_{d}}{T}·(e_{i}-e_{i-1})]+u_{0}tuyo=k [ miyo+tyot⋅j = 0∑yomij+ttre⋅( miyo−miyo − 1)]+tu0
Raíz ui u_ {i}tuyoKachiui − 1 u_ {i-1}tuyo − 1es (nota T i T_{i}tyosubíndice iii se refiere a la integral, no al índice muestral, y no participa en la operación)
ui − 1 = K [ ei − 1 + TT i ⋅ ∑ j = 0 i − 1 ej + T d T ⋅ ( ei − 1 − ei − 2 ) ] + u 0 u_{i-1}=K[e_{ i-1}+\frac{T}{T_{i}}·\sum_{j=0}^{i-1} e_{j}+\frac{T_{d}}{T}·(e_{ i-1}-e_{i-2})]+u_{0}tuyo − 1=k [ miyo − 1+tyot⋅j = 0∑yo − 1mij+ttre⋅( miyo − 1−miyo − 2)]+tu0
Estilo shojo ui u_ {i}tuyosuma ui − 1 u_ {i-1}tuyo − 1Sustituye la siguiente expresión
Δ ui = ui − ui − 1 Δu_{i}=u_{i}-u_{i-1}Δ tuyo=tuyo−tuyo − 1
Disponible
Δ ui = K [ ei + TT i ⋅ ∑ j = 0 iej + T d T ⋅ ( ei − ei − 1 ) ] + u 0 − K [ ei − 1 + TT i ⋅ ∑ j = 0 i − 1 ej + T d T ⋅ ( ei − 1 − ei − 2 ) ] + u 0 Δu_{i}=K[e_{i}+\frac{T}{T_{i}}·\sum_{j=0}^i e_{j}+\frac{T_{d}}{T}·(e_{i}-e_{i-1})]+u_{0} - K[e_{i-1}+\frac{T }{T_{i}}·\sum_{j=0}^{i-1} e_{j}+\frac{T_{d}}{T}·(e_{i-1}-e_{i- 2})]+u_{0}Δ tuyo=k [ miyo+tyot⋅j = 0∑yomij+ttre⋅( miyo−miyo − 1)]+tu0−k [ miyo − 1+tyot⋅j = 0∑yo − 1mij+ttre⋅( miyo − 1−miyo − 2)]+tu0
La parte sumatoria se resta y el TT restante es decir \frac{T}{T_{i}}e_{i}tyotmiyo
Δ ui = K [ ei − ei − 1 + TT iei + T d T ( ei − 2 ei − 1 + ei − 2 ) ] Δu_{i}=K[e_{i}-e_{i-1}+\ frac{T}{T_{i}}e_{i}+\frac{T_{d}}{T}(e_{i}-2e_{i-1}+e_{i-2})]Δ tuyo=k [ miyo−miyo − 1+tyotmiyo+ttre( miyo−2 miyo − 1+miyo − 2)]
Will KKExpandiendo K a cada término, obtenemos
Δ ui = K ei − K ei − 1 + KTT iei + KT d T ( ei − 2 ei − 1 + ei − 2 ) Δu_{i}=Ke_{i}-Ke_{i-1}+K\frac{ T}{T_{i}}e_{i}+K\frac{T_{d}}{T}(e_{i}-2e_{i-1}+e_{i-2})Δ tuyo=k eyo−k eyo − 1+ktyotmiyo+kttre( miyo−2 miyo − 1+miyo − 2)
Ampliar de nuevo
Δ ui = K ei − K ei − 1 + KTT iei + KT d T ei − 2 KT d T ei − 1 + KT d T ei − 2 Δu_{i}=Ke_{i}-Ke_{i-1}+ K\frac{T}{T_{i}}e_{i}+K\frac{T_{d}}{T}e_{i}-2K\frac{T_{d}}{T}e_{i- 1}+K\frac{T_{d}}{T}e_{i-2}Δ tuyo=k eyo−k eyo − 1+ktyotmiyo+kttremiyo−2K _ttremiyo − 1+kttremiyo − 2
Fusionar elementos similares nuevamente
Δ ui = ( K + KTT i + KT d T ) ei + ( − K − 2 KT d T ) ei − 1 + ( KT d T ) ei − 2 Δu_{i}=(K+K\frac{T} {T_{i}}+K\frac{T_{d}}{T})e_{i}+(-K-2K\frac{T_{d}}{T})e_{i-1}+( K\frac{T_{d}}{T})e_{i-2}Δ tuyo=( k+ktyot+kttre) miyo+( -K _−2K _ttre) miyo − 1+( kttre) miyo − 2
Will KKK se pone fuera de la expresión y obtenemos
Δ ui = K ( 1 + TT i + T d T ) ei + K ( − 1 − 2 T d T ) ei − 1 + K ( T d T ) ei − 2 Δu_{i}=K(1+\frac {T}{T_{i}}+\frac{T_{d}}{T})e_{i}+K(-1-2\frac{T_{d}}{T})e_{i-1 }+K(\frac{T_{d}}{T})e_{i-2}Δ tuyo=k ( 1+tyot+ttre) miyo+k ( - 1−2ttre) miyo − 1+k (ttre) miyo − 2
Ordene nuevamente
d 0 = K ( 1 + TT i + T d T ) , d 1 = − K ( 1 + 2 T d T ) , d 2 = K ( T d T ) d_ {0}=K(1+\frac{ T}{T_{i}}+\frac{T_{d}}{T}), d_{1}=-K(1+2\frac{T_{d}}{T}), d_{2} =K(\frac{T_{d}}{T})d0=k ( 1+tyot+ttre) ,d1=− k ( 1+2ttre) ,d2=k (ttre)
Entonces use d 0 , d 1 , d 2 d_{0},d_{1},d_{2}d0,d1,d2将Δ ui Δ_{i}Δ tuyosimplificado a
Δ ui = d 0 ei + d 1 ei − 1 + d 2 ei − 2 Δu_{i}=d_{0}e_{i}+d_{1}e_{i-1}+d_{2}e_{i -2}Δ tuyo=d0miyo+d1miyo − 1+d2miyo − 2
El algoritmo incremental solo necesita mantener los valores de desviación de los tres momentos anteriores al momento actual. El algoritmo PID incremental tiene ciertas ventajas en comparación con el algoritmo PID posicional: el cálculo de cada salida del algoritmo posicional utiliza el valor acumulado de las desviaciones pasadas.
∑ j = 0 iej \sum_{j=0}^i e_{j}j = 0∑yomij
Es fácil producir grandes errores acumulados, mientras que el algoritmo incremental solo necesita calcular el incremento. Cuando hay un error de cálculo o una precisión insuficiente, tendrá menos impacto en el cálculo de la cantidad de control.
7. Resumen
A través del proceso de derivación anterior, tenemos una comprensión detallada de la derivación y discretización de PID, pero aquí todavía debemos pensar en dos cuestiones.
Pregunta 1 : ¿Por qué el tiempo de integración T i T_{i} en la fórmula del algoritmo PID?tyoy tiempo diferencial T d T_ {d}tre¿Uno en el denominador y otro en el numerador?
Hay principalmente una consideración dimensional .
La parte integral es la ganancia proporcional multiplicada por el error, luego multiplicada por la unidad de tiempo dividida por la constante de tiempo de integración, por lo que la constante de tiempo de integración T i T_{i}tyoIntroduzca el denominador y la unidad de tiempo por la que se debe multiplicar la integral para cancelar, de modo que la dimensión de la subintegral siga siendo la ganancia proporcional multiplicada por el error. (Por ejemplo, para velocidad vvv veces tiempottt obtiene la distanciasss , la dimensión en este momento cambia de velocidad a distancia. En este momento, el tiempo de integraciónT i T_{i}tyocolocado en el denominador, terminará con el tiempo ttt se cancela y la dimensión final sigue siendo la velocidad. )
Lo mismo ocurre con la parte diferencial: multiplica la ganancia proporcional por el error, luego multiplica por la constante de tiempo diferencial, divide por la unidad de tiempo, pon el tiempo diferencial T en el numerador y compénsalo por la unidad de tiempo por la que Es necesario dividir el diferencial. La dimensión del diferencial sigue siendo la ganancia proporcional dividida por el error.
En cuanto a la ganancia proporcional K p K_{p}kpLa dimensión está determinada por la relación física y el modelo matemático entre error y salida.
Pregunta 2 : ¿Por qué en la derivación de la discretización de la parte integral PID, el error e (j) e(j)e ( j ) también debe multiplicarse por el período de muestreoΔ t Δt¿ Δt se acumula nuevamente?
Esto se debe a que la esencia de la integral es calcular el área y dividir finamente el área completa de una forma irregular en varias longitudes ( yyvalor del eje y ) es diferente, el ancho (tiempo de muestreoΔt ΔtΔt ) el mismo rectángulo, y luego acumular las áreas de estos rectángulos para finalmente obtener el área completa de la forma irregular, como la velocidad instantánea vvv versus tiempottt está integrado y la distanciasss , el tamaño del área después de la integración corresponde a la distancia del viaje, como se muestra en la siguiente figura.

Entonces para cometer el error e ( j ) e(j)El efecto acumulativo de e ( j ) acercándose a la integral debe multiplicarse porΔ t ΔtΔ t。
Pregunta 3 : TT en la expresión de derivación de discretización PIDT和T i T_{i}tyo,T d T_ {d}tre¿La diferencia?
Ambos se usan para describir el tiempo, pero son completamente diferentes, TTT representa el tiempo de muestreoΔt ΔtΔ t,而T i T_{i}tyo,T d T_ {d}treEs una constante por determinar, que se utiliza para ajustar la estabilidad del sistema de modo que el sistema pueda ajustarse de acuerdo con diferentes escenarios de aplicación.