Por lo general, cuando se realiza un seguimiento por radar de ondas milimétricas, el tema del sistema de coordenadas no se considera particularmente. De hecho, el modelo de movimiento y el algoritmo asumen que el sistema de coordenadas es estacionario, pero de hecho la onda milimétrica está instalada en el vehículo y se mueve con el vehiculo Hay traslacion y tambien rotacion. Si todavía se usa la suposición de un sistema de coordenadas estacionario, traerá errores obvios.
Los siguientes intentos de ilustrar este problema.
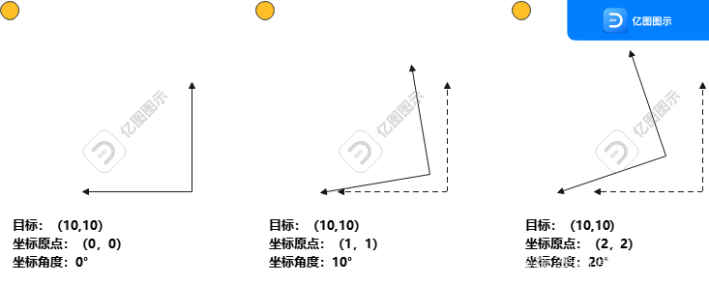
Suponiendo que el objetivo está fijo, el radar de ondas milimétricas está instalado en el vehículo y se mueve con el vehículo, como se muestra en la figura a continuación. Las coordenadas del objetivo son siempre (10, 10), el vehículo propio está en (0, 0) en el momento t0 y el ángulo del sistema de coordenadas es 0°; en el momento t1, está en (1, 1), el ángulo del sistema de coordenadas es de 10°, y en el momento t2 está en (2, 2), el ángulo del sistema de coordenadas es de 20° y hay una cierta rotación.
Las coordenadas del objetivo en el momento t0 son (10, 10),
Las coordenadas del objetivo en el sistema de coordenadas en el tiempo t1 son (cx1, cy1)=(9,9) y luego rotan θ1=10°, luego hay
x1 = cx1*cosθ1 + cy1*sinθ1
y1 = -cx1*sinθ1 + cy1*cosθ1Lleva cx1, cy1 y cosθ1, sinθ1 a x1=10.4256, y1=7.3008
Las coordenadas de destino del sistema de coordenadas en el tiempo t2 son (cx2, cy2) = (8, 8) y luego rotan θ2 = 20°, luego
x2 = cx2*cosθ2 + cy2*sinθ2
y2 = -cx2*sinθ2 + cy2*cosθ2Lleva cx2, cy2 y cosθ2, sinθ2 a x2=10.2536, y2=4.7816
Por lo tanto, desde el momento t0 hasta el momento t1, en el sistema de coordenadas del vehículo
Rvx1 = (x1 - x0)/Δt = 0.4256m/s
Rvy1 = (y1 - y0)/Δt = -2.6992m/sY en el sistema de coordenadas mundial
vx1 = -1m/s
vy1 = -1m/sDel tiempo t1 al tiempo t2, en el sistema de coordenadas del vehículo
Rvx2 = (x2 - x1)/Δt = -0.272m/s
Rvy2 = (y2 - y2)/Δt = -2.5192m/sY en el sistema de coordenadas mundial
vx2 = -1m/s
vy2 = -1m/sLa velocidad del objetivo que se ve en el sistema de coordenadas del vehículo propio es diferente de la del sistema de coordenadas mundial, principalmente porque el vehículo propio tiene movimiento de rotación, no solo de traslación. Si el vehículo del ego es solo traslacional, la velocidad calculada es consistente con el sistema de coordenadas del mundo.
En el caso de la rotación del auto ego, la velocidad relativa se puede calcular unificando las coordenadas delanteras y traseras.
En el sistema de coordenadas del vehículo ego en el tiempo t1
x0 = 11,584, y0 = 8,112, entonces tenemos
Mvx1 = - 1.1584m/s
Mvy1 = -0.8112m/sEn el sistema de coordenadas del vehículo ego en el tiempo t2
x1 = 11,5353, y1 = 5,3793, entonces tenemos
Mvx2 = -1.2817m/s
Mvy2 = -0.5977m/sSe puede ver que el error de velocidad después de la compensación es menor y la estimación es más precisa durante la extrapolación.
Para dar otro ejemplo más intuitivo, el auto-vehículo se mueve en un círculo alrededor del origen de las coordenadas, con un radio de 10, cada ciclo es de 50ms, y la rotación entre ciclos es de 1° (0.349rad).
Si simplemente se hace la diferencia entre los dos marcos, la velocidad relativa horizontal y vertical del objetivo siempre está cambiando y, de hecho, debería ser un valor constante.

Si la compensación de conversión de coordenadas se realiza entre las coordenadas, se puede obtener la velocidad relativa precisa, que también se puede derivar a través de la fórmula.
vx = -r*(yawrate*Δt)/Δt = -r*yawrate = -3.49m/s
vy = 0m/s