1. Información general
Debido a la desviación de la precisión de fabricación y el proceso de ensamblaje, la lente de la lente introducirá distorsión, lo que provocará una distorsión de la imagen, es decir, una distorsión de la imagen.
En el artículo anterior " Modelo de visión artificial: matriz de proyección ", se describe el modelo de imagen del sistema de visión artificial. En este modelo, los parámetros internos de la cámara (relacionados con el tamaño del píxel, la distancia focal, el centro del píxel) y los parámetros externos de la cámara (relacionados con la cámara En relación con la pose del sistema de coordenadas del mundo), este modelo es un modelo ideal, o un modelo lineal, que no tiene en cuenta la influencia de la distorsión causada por la lente de la lente.
En combinación con el modelo de imagen anterior, la distorsión puede entenderse como que la luz entre el punto de imagen y el punto del objeto se curva, como se muestra en la figura a continuación. Los tres puntos OO
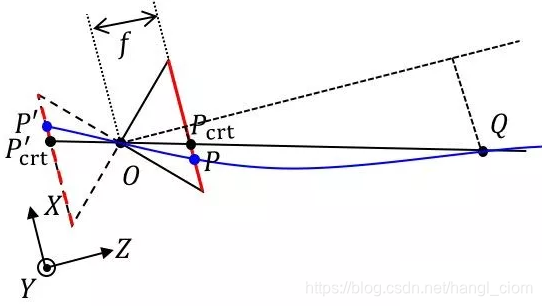
que deberían haber sido colineales en la figuraO、P crt P_{crt}PAGc r t, Q, ahora no son colineales debido a alguna desviación de la lente, P crt P_{crt}PAGc r tse refleja en el PPPunto P , obviamente, la relación en este momento ya no es la relación matricial discutida anteriormente, es decir, bajo la condición de distorsión, el resultado calculado por la fórmula matricial anterior es incorrecto.
Por lo tanto, antes de usar esta fórmula de matriz de modelo visual, primero debemos eliminar la distorsión generada. El mismo principio que el anterior, si la distorsión de la lente se puede expresar mediante un modelo matemático o una fórmula matemática, podemos eliminar fácilmente la distorsión. Ponemos esto modelo se denomina "modelo de distorsión".
2 Distorsión de la lente
La distorsión de lente incluye principalmente: distorsión radial, distorsión tangencial, distorsión de lente delgada, etc., pero las más notables son la distorsión radial y la distorsión tangencial, por lo que solo consideramos estos dos tipos de distorsión en este modelo. Al mismo tiempo, la distorsión de la imagen es una combinación de dos tipos de distorsión, por lo que toda la distorsión se descompone en un componente de distorsión radial y un componente de distorsión tangencial.
2.1 Distorsión Radial
Distorsión radial: Es la distorsión distribuida a lo largo de la dirección del radio de la lente, como la distorsión producida por la conocida lente ojo de pez, distorsión de cojín, distorsión de barril, etc.

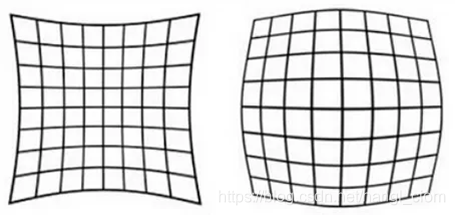
La siguiente figura muestra la distribución de la distorsión radial, generalmente cuanto más lejos del centro, más grave.
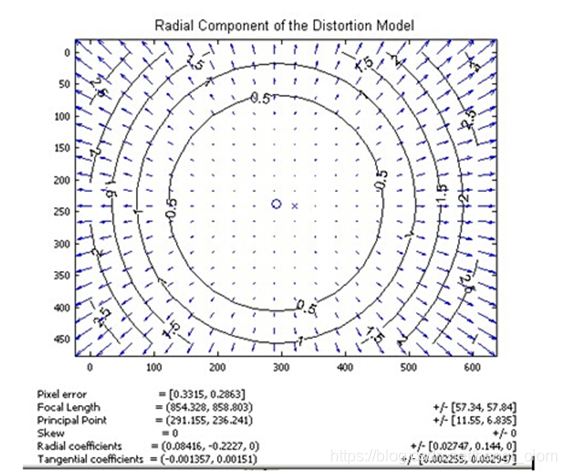
Dado que esta distorsión se distribuye radialmente hacia afuera desde el centro, usamos los primeros elementos de la expansión de la serie de Taylor en r=0 para aproximar la distorsión radial, y la relación de coordenadas antes y después de la distorsión radial se distorsiona x = x ( 1 +
k 1 r 2 + k 2 r 4 + k 3 r 6 ) y distorsionada = y ( 1 + k 1 r 2 + k 2 r 4 + k 3 r 6 ) x_{distorsionada}=x(1+k_1r^2 +k_2r^ 4+k_3r^6)\\ y_{distorsionado}=y(1+k_1r^2+k_2r^4+k_3r^6)Xdistorsionado _ _ _ _ _ _ _ _=X ( 1+k1r2+k2r4+k3r6 )ydistorsionado _ _ _ _ _ _ _ _=y ( 1+k1r2+k2r4+k3r6 )
式中:
x distorsionado , y distorsionado x_{distorsionado},y_{distorsionado}Xdistorsionado _ _ _ _ _ _ _ _,ydistorsionado _ _ _ _ _ _ _ _——Las coordenadas de la imagen distorsionada original
x , yx,yx ,y - coordenadas correctas (coordenadas de imagen no distorsionadas o coordenadas corregidas)
rrr ——半径,r 2 = x 2 + y 2 r^2 =x^2 +y^2r2=X2+y2
k 1 , k 2 , k 3 k_1,k_2,k_3k1,k2,k3—— Parámetro de distorsión radial introducido
2.2 Distorsión tangencial
Distorsión tangencial: es causada por el hecho de que la lente en sí no es paralela al plano del sensor de la cámara (plano de la imagen) o al plano de la imagen. Esta situación se debe principalmente a la desviación de instalación de la lente pegada en el módulo de la lente, como se muestra en la figura de abajo.
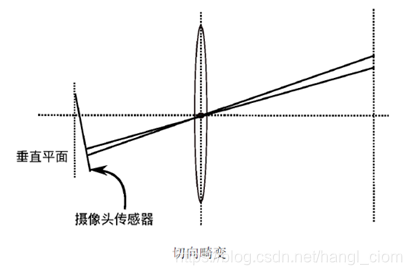
Con la gran mejora del proceso de fabricación de cámaras, este tipo de situación rara vez ocurre, por lo que la distorsión tangencial puede ignorarse en muchos casos.
La siguiente figura muestra la distribución de la distorsión tangencial.
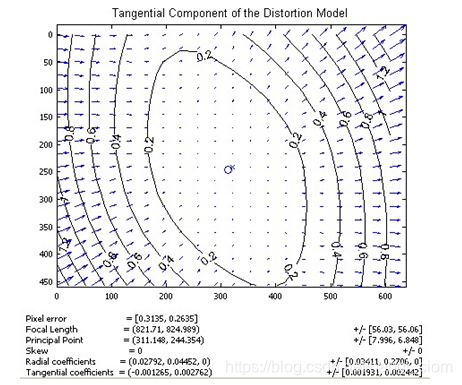
La distorsión tangencial se puede describir mediante dos parámetros adicionales p1 y p2 x
distorsionada = x + 2 p 1 xy + p 2 ( r 2 + 2 x 2 ) y distorsionada = y + 2 p 2 xy + p 1 ( r 2 + 2 y 2 ) x_{distorsionado}=x+2p_1xy+p_2(r^2+2x^2)\\ y_{distorsionado}=y+2p_2xy+p_1(r^2+2y^2 )Xdistorsionado _ _ _ _ _ _ _ _=X+2p _1x y+pag2( r2+2x _2 )ydistorsionado _ _ _ _ _ _ _ _=y+2p _2x y+pag1( r2+2 años2 )
式中:
x distorsionado , y distorsionado x_{distorsionado},y_{distorsionado}Xdistorsionado _ _ _ _ _ _ _ _,ydistorsionado _ _ _ _ _ _ _ _——Las coordenadas de la imagen distorsionada original
x , yx,yx ,y - coordenadas correctas (coordenadas de imagen no distorsionadas o coordenadas corregidas)
rrr ——半径,r 2 = x 2 + y 2 r^2 =x^2 +y^2r2=X2+y2
p 1 , p 2 p_1,p_2pag1,pag2—— Parámetro de distorsión tangencial introducido
3 Modelo de distorsión de visión artificial
En resumen, el modelo de distorsión de la lente del sistema de visión artificial se puede obtener de la siguiente manera
Componente radial distorsionada:
x distorsionada = x ( 1 + k 1 r 2 + k 2 r 4 + k 3 r 6 ) y distorsionada = y ( 1 + k 1 r 2 + k 2 r 4 + k 3 r 6 ) x_{distorsionado}=x(1+k_1r^2+k_2r^4+k_3r^6)\\ y_{distorsionado}=y(1+k_1r^2+k_2r ^4+k_3r ^6)\\Xdistorsionado _ _ _ _ _ _ _ _=X ( 1+k1r2+k2r4+k3r6 )ydistorsionado _ _ _ _ _ _ _ _=y ( 1+k1r2+k2r4+k3r6 )
Fórmula:
x distorsionada = x + 2 p 1 xy + p 2 ( r 2 + 2 x 2 ) y distorsionada = y + 2 p 2 xy + p 1 ( r 2 + 2 y 2 ) x_{distorsionada}=x+ 2p_1xy+p_2( r^2+2x^2)\\ y_{distorsionado}=y+2p_2xy+p_1(r^2+2y^2)Xdistorsionado _ _ _ _ _ _ _ _=X+2p _1x y+pag2( r2+2x _2 )ydistorsionado _ _ _ _ _ _ _ _=y+2p _2x y+pag1( r2+2 años2 )
Contiene 5 parámetros de distorsión:k 1 , k 2 , k 3 , p 1 , p 2 k_1,k_2,k_3,p_1,p_2k1,k2,k3,pag1,pag2.
Para un sistema de imagen de lente dado, ¿cómo se obtienen estos 5 parámetros de distorsión? Esto implica la "calibración de la cámara", es decir, debe resolverse en función de una serie de valores de coordenadas conocidos del punto de imagen original y el punto de imagen distorsionado, que se incluyen en la fórmula anterior. Para obtener más información, consulte "Máquina Calibración de cámara de visión " .