Creo que esto está claro, diciendo que los parámetros internos de la cámara incluyen la matriz de parámetros internos y la matriz de distorsión, por lo que es fácil de entender.Anteriormente equiparé los parámetros internos con la matriz de parámetros internos.
Explicación de los parámetros internos y externos de la cámara
Cuya olla 2020-12-02 09:56:57 553 Colección 1
Columna de categoría: Cámara Etiqueta de artículo: Otro
derechos de autor
Los parámetros internos de la cámara se dividen en matriz de parámetros internos y matriz de parámetros de distorsión
1. La matriz de parámetros internos se muestra a continuación. Cabe señalar que la lente real también tendrá distorsión radial y tangencial, y estas distorsiones pertenecen a los parámetros internos de la cámara.
La matriz de
parámetros internos es la siguiente: fx y fy son las distancias focales. En general, son iguales, x0 e y0 son las coordenadas del punto principal (relativas al plano de imagen) y s es el parámetro de inclinación de la coordenada eje, que es 0 en el caso ideal.
2. Parámetros de distorsión: k1, k2, k3 coeficientes de distorsión radial, p1, p2 son coeficientes de distorsión tangencial. La distorsión radial ocurre en el proceso de convertir el sistema de coordenadas de la cámara al sistema de coordenadas físico de la imagen. La distorsión tangencial se produce en el proceso de fabricación de la cámara porque el plano del elemento fotosensible no es paralelo al objetivo.
3. Distorsión tangencial: la causa es que la lente no está completamente paralela al plano de la imagen Este fenómeno ocurre cuando el generador de imágenes está conectado a la cámara. 
4. Distorsión radial: La causa es que la luz se curva más lejos del centro de la lente que cerca del centro. La distorsión radial incluye principalmente la distorsión de barril y la distorsión de acerico.
Las siguientes dos imágenes muestran estos dos tipos de distorsiones: 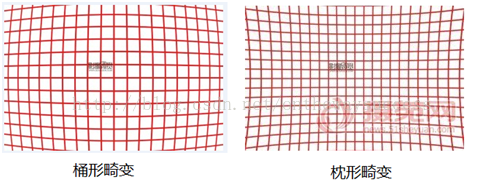
se ven así en fotos reales:
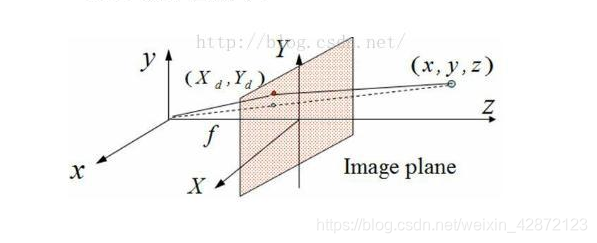
5. Distorsión de la lente de la cámara
La desviación del punto de la imagen de su posición ideal causada por el diseño, la fabricación y el montaje del sistema de la lente del objetivo de la cámara se denomina distorsión óptica, como se muestra en la siguiente figura:
La relación de conversión general: los parámetros externos de la 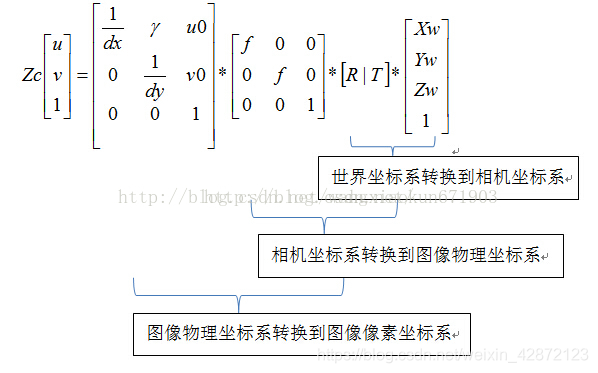
cámara se dividen en matriz de rotación y matriz de traslación
La matriz de rotación y la matriz de traslación juntas describen cómo transformar un punto del sistema de coordenadas mundial al sistema de coordenadas de la cámara.
1. Matriz de rotación: describe la dirección del eje de coordenadas del sistema de coordenadas mundial en relación con el eje de coordenadas de la cámara.
2. Matriz de traducción: describe la posición del origen espacial en el sistema de coordenadas de la cámara.
Artículo de referencia:
https://blog.csdn.net/yangdashi888/article/details/51356385
https://blog.csdn.net/wangxiaokun671903/article/details/37966891