Actualmente robot , seguridad inteligente , AR / VR , vehículos aéreos no tripulados y muchas otras industrias, exigen cada vez más prominente profundidad visual. A medida que el robot campos, utilizando el cámara de profundidad para la navegación visual, entorno externo identificación, planificación caminos para lograr obstáculo evitación de trabajo, etc., basado en cámara de profundidad de navegación visual se ha convertido en la solución aceptada. gigantes internacionales de Apple, Microsoft, Facebook / Oculus, Intel, Google y otros a largo objetivo de la tecnología en los últimos años adquirieron una docena de casas en esta zona y empresas de nueva creación no ha disminuido. Pero, por desgracia, las grandes empresas, sin excepción, están en el umbral de la construcción de la tecnología de la base de sus productos, servicios ecológicos internos, al menos por ahora no convertirse en un proveedor profesional de la tecnología y los servicios de un sensor de profundidad.
Por un lado la profundidad del mercado de la tecnología de visión tiende a exigir reventón, por otra parte, puede ahora ofrecer productos y programas, pocas empresas, y en el país en la tecnología de visión de profundidad desarrollado por un puñado de empresas, tales cámara de profundidad puede proporcionar productos y soluciones externas la empresa es convertirse en el mercado de la carne y las patatas. "Producto Wisdom Circle", el reportero visitó la solución de cámara de tres de profundidad de campo con diferentes características del desarrollo de la empresa y sus productos fueron analizados y comparados con la esperanza de llevar al lector a aprender más acerca de la tecnología y los productos.
cámara de profundidad por la tecnología tecnología de corriente se puede dividir en las siguientes tres categorías:
(Monocular) estructurado luz,
La visión binocular (/ visible binocular binocular RGB),
TOF tiempo de vuelo método. China participa en el programa monocular estructura óptica desarrollado a la luz de Obi Shenzhen Tecnología Co., Ltd., software Nanjing Hua Jie Aimi, así como el uso de un binocular estructurado esquemas de luz Shanghai planes de información Yang Technology Co., Ltd .; hay programa TOF Shenzhen mundo de la música Technology Co., Ltd; aplicaciones de visión binocular que se encuentran en Dajiang UAV.
| tecnología | ||
| (Monocular) luz estructurada | La visión binocular (binocular / visible binocular RGB) | TOF tiempo de vuelo |
| Obi en Shenzhen Nanjing Hua Jie Aimi |
Shanghai planea Yang Dajiang UAV |
Shenzhen línea de la música del mundo |
================================================== =================================================
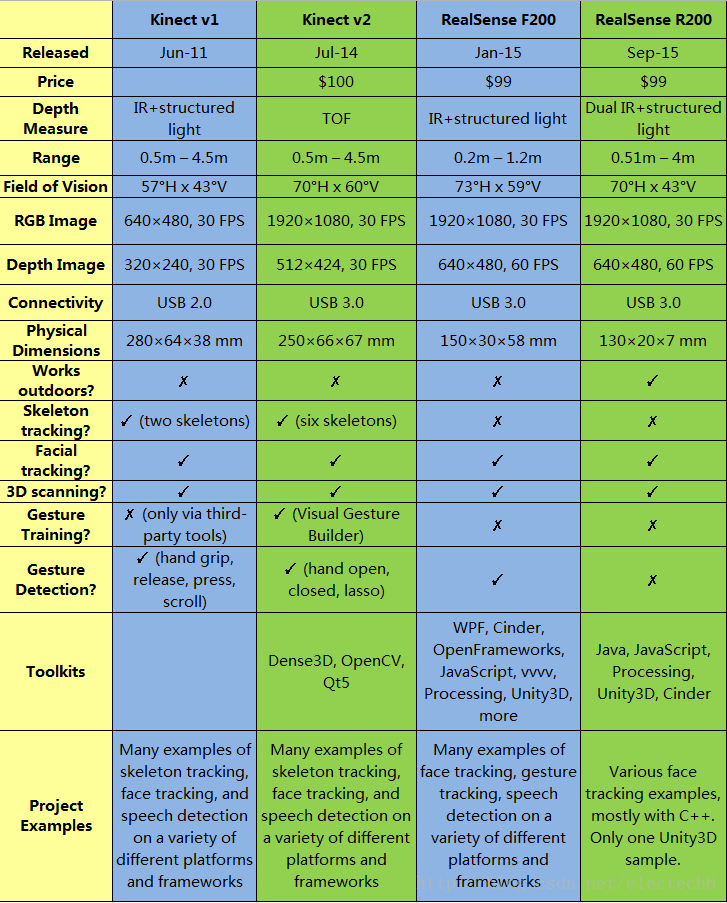
Profundidad fabricantes de cámaras en este documento se refieren a: Microsoft, Intel, Leap Motion, Orbbec, dibujo Estructura Yang, occipital, Stereolabs, DUO. El extremo de la cámara de profundidad adjunta listas comparación detallada.
Microsoft Kinect
Microsoft introdujo dos Kinect, la generación de Kinect (Kinect v1) se basa en los principios de la cámara de profundidad luz estructurada, Kinect segunda generación (Kinect V2), se basa en el principio de la cámara de profundidad TOF. De la siguiente manera:


Aquí introducir principalmente Kinect V2. sensor de infrarrojos Kinect V2 tiene un tamaño grande, y (el otro con respecto a la cámara de profundidad) que tiene un relativamente amplio ángulo de visión, mapa de generación de profundidad relativamente alta calidad. Además, Kinect V2 es forzar el SDK, SDK proporciona un seguimiento simultáneo de hasta seis personas esqueleto, los gestos básicos y seguimiento de la cara, el apoyo de la escoria y Open Frameworks, y tiene un sistema incorporado en la unidad plug-in 3D. Sin embargo, Kinect V2 también tiene algunas desventajas, tales como un ordenador se pueden conectar un dispositivo Kinect v2, Windows8 sólo en y por encima del sistema operativo.
REALSENSE Intel
de la serie Intel REALSENSE es diferente de la cámara de profundidad posicionamiento de la Serie Kinect de Microsoft, Kinect prestar más atención al seguimiento más distante esqueleto humano, y REALSENSE prestar más atención a la cara a corta distancia, el seguimiento de la mano, el escenario principal es un ordenador portátil, cojín, virtuales dispositivo de la realidad.
Intel serie REALSENSE tienen muchas opciones, como el anterior REALSENSE F200, REALSENSE R200, nueva serie REALSENSE D400, REALSENSE ZR300, REALSENSE SR300 y así sucesivamente. A continuación REALSENSE ejemplo R200 introducir.

REALSENSE R200 se basa en la tecnología de cámara de profundidad luz estructurada binocular. R200 es tener dos cámaras de imagen infrarroja especial, como se muestra a continuación, se marcan a la cámara de infrarrojos cámara de infrarrojos izquierda y derecha, que tienen el mismo hardware y el ajuste de parámetros. Principio de funcionamiento: proyector de infrarrojos proyecta moteado de infrarrojos, una cámara de infrarrojos recoger dos a la izquierda y la derecha dos imágenes infrarrojas, calculando un procesador mapa de disparidad según el moteado dos puntos de características coinciden con la imagen infrarroja, para obtener el mapa de profundidad final. Por lo que el R200 es esencialmente una tecnología de infrarrojos binocular.
R200 gama de medición de profundidad: Indoor 0,5 m-3,5 m, al aire libre 10m más lejano. El uso real de condiciones al aire libre ambiente de luz afectados por grandes, lo que es debido a la potencia limitada del emisor de infrarrojos, proyectadas en el objeto punto demasiado oscura, la luz ambiente se sumerge fácilmente.
SDK compatibilidad fuerte, soporte para C ++, C #, JavaScript, producción, la Unidad y de la escoria y otros marcos. Cabe señalar, R200 SDK es compatible con sólo el seguimiento de la cara no soporta el seguimiento gesto y la pista esqueleto.
sitio web oficial: https://software.intel.com/zh-cn/realsense/previous
Leap Motion Controller
salto de movimiento del mando es una muy pequeña, la adquisición del equipo de seguimiento dedo. Se utiliza principalmente para el casco de realidad virtual, un ordenador portátil. El dispositivo puede ser de hasta 120 fps velocidad de fotogramas seguimiento finas manos acciones de las personas, tales como golpe, agarrar, pellizco, perforación y así sucesivamente, gran experiencia interactiva.
SDK es compatible con la posición tridimensional de las manos del seguimiento de las articulaciones, la distancia más lejana efectiva de 0,6 m. Apoyar para WPF, Cinder, Openframeworks, JavaScript, producción, Unity3D y otros marcos. Sin embargo, Salto controlador de movimiento no proporciona ninguna de IR, RGB, o los datos de punto de enturbiamiento.
sitio web oficial: https://www.leapmotion.com/product/desktop#108
Astra Orbbec
Orbbec (luz Obi) está en Shenzhen, a empresas de nueva creación. La producción en volumen de Orbbec Astra, Astra Orbbec Mini, Orbbec Persee cámara distinta profundidad.
Y una primera generación del Astra Astra Pro ejemplo, que se basan en la estructura de la cámara de profundidad luz infrarroja, un mapa de profundidad es VGA (640 × 480) a 30 fps. La diferencia es que la resolución de color de la cámara, Astra ofrece un VGA a 30 fps, mientras Astra Pro es 720p @ 30 FPS.
SDK de Orbbec Astra es simple, apoya seguimiento básico gesto, el reconocimiento de gestos se puede utilizar en la interacción hombre-máquina, pero no admite la extracción de esqueleto. En cuanto a la medición de alcance de hasta 8 m. Por lo tanto, Orbecc Astra es adecuado para escenarios más distantes de interior. Sin embargo, el dispositivo sólo es compatible marco OpenNI en C ++.
sitio web oficial: https: //orbbec3d.com/
Figura Yang
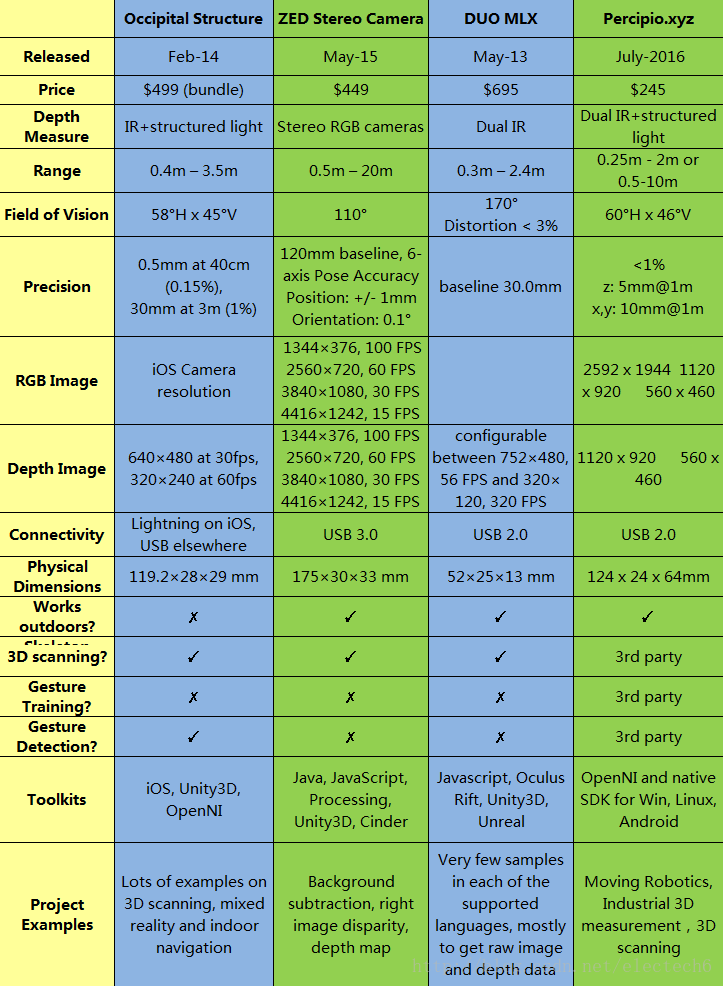
Figura Yang tecnología es una empresas de nueva creación con sede en Shanghai. La compañía tiene un pequeño, fácil de integrar cámara de profundidad binocular activa (no incluye RGB), pero también puede ser utilizado independientemente de la profundidad de la cámara RGB + infrarrojo activo binocular. cámara RGB-D que incluye una variedad de modelo industrial y a nivel de consumidor a una cámara de profundidad RGB-D a nivel de consumidor FMB11-C presenta un ejemplo.
El sitio web oficial, FMB11-C precisión de menos de 1%, en particular en la dirección z: 5 mm a 1 m, x, y dirección: 10 mm @ 1m, pueden trabajar dentro y fuera del 0.5-30m distancia de trabajo. resolución de profundidad de hasta 1120 x 920, la velocidad de cuadro de hasta 15 FPS. La alineación puede ser de salida, el RGB y nube de puntos gráficos de profundidad de sincronización o IR figura. El soporte para Windows, Linux, Android, la plataforma ROS. Y varios dispositivos simultáneamente sin interferencias. Adecuado para escenarios de aplicación de larga distancia para la velocidad de fotogramas menos exigentes.
sitio web oficial: http: //www.percipio.xyz/
Estructura occipital
estructura de sensor puede ser una combinación perfecta de productos de Apple IPAD, a través de una línea de datos del enlace IPAD viene batería de litio recargable (la vida de 4 horas), APP se puede aplicar fácilmente mediante el escaneo de retrato, artículo, modelo tridimensional de la escena y así sucesivamente. Simple, genera muy rápidamente en un modelo de velocidad. Al mismo tiempo, se proporciona el uso de OpenNI SDK es compatible con Windows, MacOS, Linux y Android.
sensor de estructura y otros enfoques cámara de profundidad en un posicionamiento diferente del seguimiento del cuerpo / la mano, que se centran más en el seguimiento y dispositivo de escaneo tridimensional en sí. Estructura del sensor usando el SDK, los usuarios pueden experimentar una realidad mixta, objetos virtuales pueden interactuar con el mundo físico real, y también simular el efecto de enmascaramiento similar al espacio real.
sitio web oficial: https: //structure.io/
ZED Stereolabs
Stereolabs ZETA se basa en el principio de la cámara de profundidad RGB visión estéreo binocular. Interior y exterior se puede utilizar, en lo que rango de profundidad de hasta 20 metros, mapa de profundidad resolución es muy alta, hasta 4416x1242 15fps, puede necesitar ser ajustado de acuerdo a la velocidad de fotogramas, la velocidad de cuadros más alta 1344x376 @ 100FPS, el ángulo máximo de cobertura de vista de 110 °.
A pesar de que los parámetros de hardware relativamente superiores, pero siempre SDK es relativamente débil, sólo puede ser simple para obtener el flujo de datos de profundidad, sin rostro / gesto pista / esqueleto relacionados con soporte de herramientas, los desarrolladores necesitan a ti mismo.
Zed cámara estéreo es ideal para ambientes al aire libre una alta frecuencia de imagen, aplicaciones de larga distancia, que se utiliza principalmente en AR / VR, robots autónomos y otras escenas.
sitio web oficial: https: //www.stereolabs.com/zed/
DUO
DUO es una empresas de nueva creación en Estados Unidos, los productos principales: DUO MLX, MC DUO, DUO M. Nos DUO MLX describe como ejemplo.
DUO MLX se basa en el principio de la cámara de profundidad binocular infrarrojo activo. 3 se caracteriza por tener el control programable del emisor de infrarrojos LED de potencia, el rango de medición se puede ajustar según las necesidades. También se construyó en los seis grados de libertad más alto 250Hz IMU (Inertial unidad de navegación), el ángulo de visión máximo de la lente 170 °, 30 mm de la línea de base binocular, tamaño compacto, interfaz de comunicaciones USBMini-B, adecuado para la investigación científica o la integración del producto.
SDK proporciona una interfaz API de lenguaje C, la salida directa mapa de profundidad, pero no el gesto / la cara / pista kit de desarrollo esquelético relacionado. plataformas de desarrollo compatibles, incluyendo Linux, OS X, Windows y procesador embebido ARM, AMD, Intel y Nvidia Tegra K1.
DUO producto es adecuado para los investigadores o desarrolladores de productos, principalmente para la robótica industrial, y otros dispositivos embebidos que requieren altas tasas de marco de aplicaciones interiores y exteriores.
sitio web oficial: https: //duo3d.com/
parámetros de la cámara de profundidad lista de comparación detallada

resumen
Profundidad muchos fabricantes de cámaras, los principios de diseño de productos y parámetros técnicos varían, el volumen, la diferencia de precios es demasiado grande. Las necesidades de los usuarios en función de sus diferentes aplicaciones y escenarios de uso para elegir el más adecuado a su cámara de profundidad.
En resumen, la cámara de profundidad no es la mejor, sólo el más adecuado.
