Método de establecimiento del modelo DH estándar del robot: analogía
La tabla de parámetros DH estándar del robot Puma560 es la siguiente
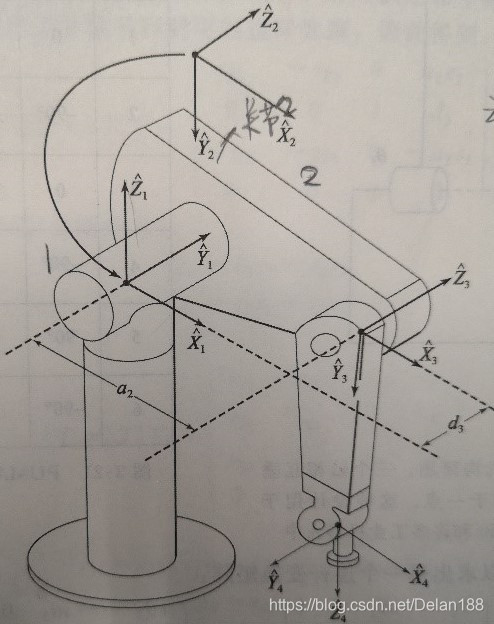
: Theta: ángulo de rotación de la articulación
D: desplazamiento del enlace
A: longitud del enlace
Alfa: ángulo de torsión del enlace
theta d a alpha
1 q1 0.0000 0.0000 90
2 q2 0.0000 0.4318(a2) 0
3 q3 0.1500(d3) 0.0203(a3) -90
4 q4 0.4318(d4) 0.0000 90
5 q5 0.0000 0.0000 -90
6 q6 0.0000 0.0000 0
El modelo de robot Puma560 se muestra a continuación

Consulte el modelo de robot de puma560 y observe el modelo de robot de Staubli TX90. El modelo es como se muestra a continuación:

Al comparar el tipo de robot puma560 y robot Staubli, la diferencia es que el eje Z de la articulación 1 del robot staubli y el eje Z de la articulación 2 tienen una compensación de 50 mm, y el valor de compensación es a1 del robot staubli; articulación 3 de la robot El eje Z del p560 está en el mismo plano que el eje Z de la articulación 4, y el eje Z de la articulación 4 del p560 está compensado por una distancia de a3 con respecto al eje Z de la articulación 3. Por lo tanto , el valor d3 de la máquina staubli es 0, y hay un valor para el valor a3 de p560.
Por lo tanto, la tabla de parámetros DH estándar del robot staubli se puede escribir de la siguiente manera:
theta d a alpha
1 q1 0.0000 -0.0500 90
2 q2 0.0000 0.4250(a2) 0
3 q3 0.0500(d3) 0.0000(a3) -90
4 q4 0.4250(d4) 0.0000 90
5 q5 0.0000 0.0000 -90
6 q6 0.0000 0.0000 0
A partir de lo anterior, los únicos cambios en la tabla de parámetros DH son: se agrega el valor a1, se cancela el valor a3 y se cambian los valores a2, d3 y d4.
Los parámetros DH se pueden verificar con la función de la caja de herramientas del robot peter en matlab, y el modelo de robot staubli se obtiene como se muestra a continuación:

La única indicación de que la situación real no es consistente es que las direcciones X e Y de las coordenadas de la base del robot establecidas por matlab son opuestas al sistema de coordenadas de la base del robot real. Sin embargo, el estado del ángulo de rotación de la articulación del robot en este momento es el estado más consistente con el robot real.
A partir de esto, saque un modelo de robot, podemos escribir directamente sus parámetros DH estándar, la siguiente imagen muestra el robot Estun, el robot Estun es uno de los tres gigantes de los robots domésticos, el rendimiento general del robot es mejor, puede probar es usted mismo Escriba sobre
