From: Journal of Command and Control
Authors: Yang Zhipeng, Li Bo, Gan Zhigang, Liang Shiyang
"Artificial Intelligence Technology and Consulting" released
Summary
Aiming at the problem that UAVs cannot make reasonable responses to unknown environments when performing route following tasks in the air, a quadrotor UAV route following method based on deep reinforcement learning is proposed. Through UAV force analysis, Euler Angle transformation is used to establish a quadcopter UAV dynamics model. Under the framework of deep reinforcement learning, relevant factors such as UAV coordinate values, Euler angles, and speed values are analyzed, and the state space of the UAV is fuzzified as a deep reinforcement Learning state input. Compared with traditional methods, the nonlinear flight kinematics and dynamics model of the quad-rotor UAV constructed is more realistic. The simulation results show that after continuous training and learning, the quad-rotor UAV can respond to random The generated mission route is followed with high accuracy.
Key words
Quadrotor UAV, route following, deep reinforcement learning, state space, dynamic model


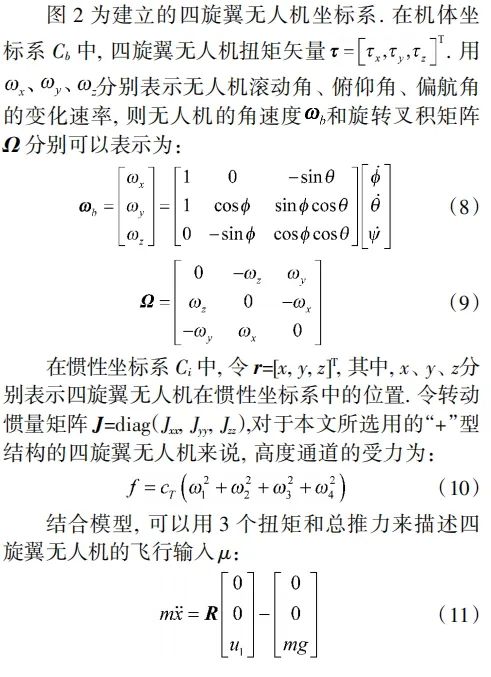
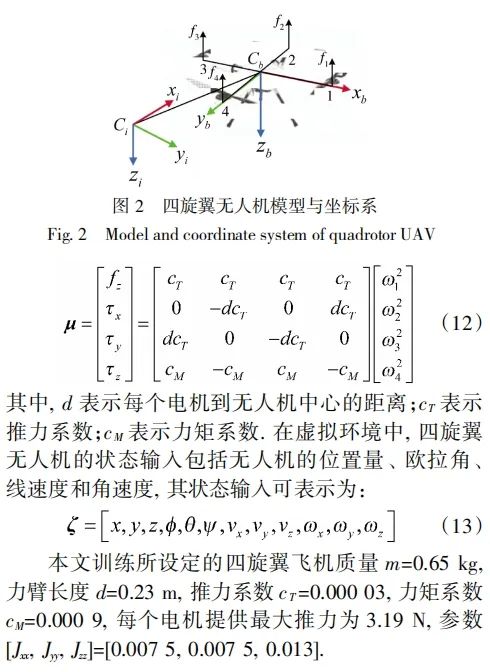
1 Quadcopter UAV model
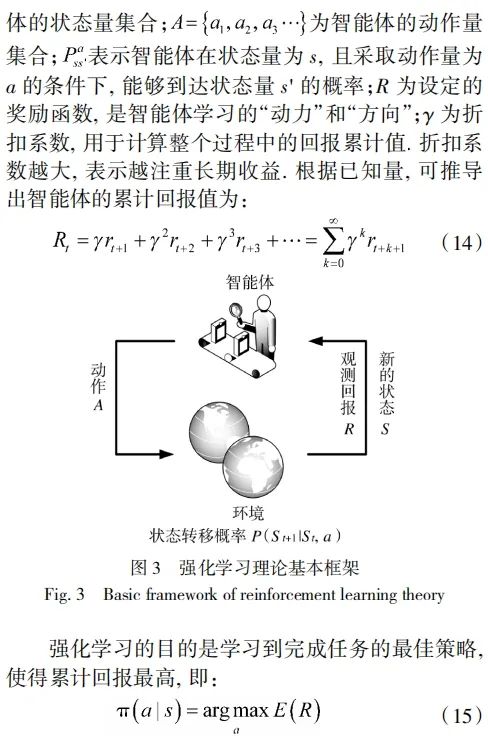
2 Deep reinforcement learning algorithm
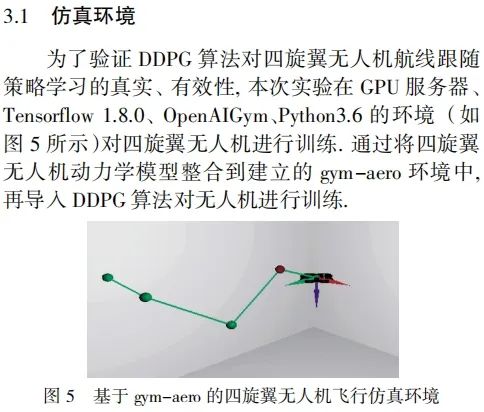
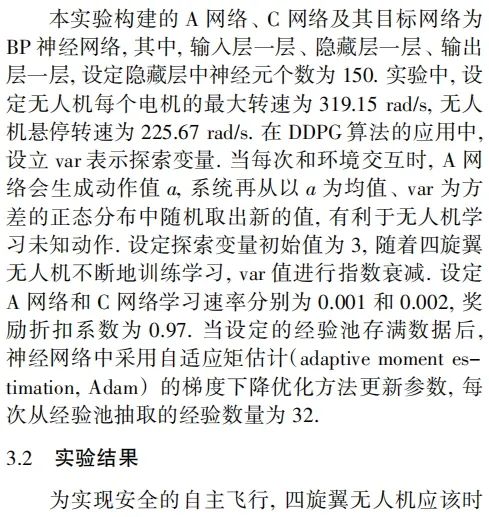
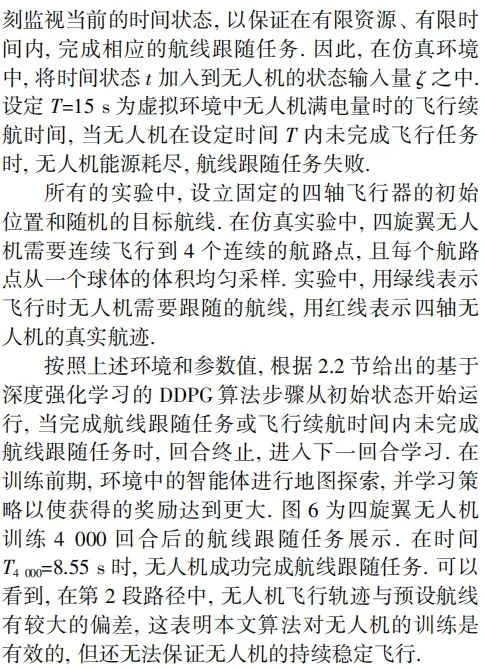
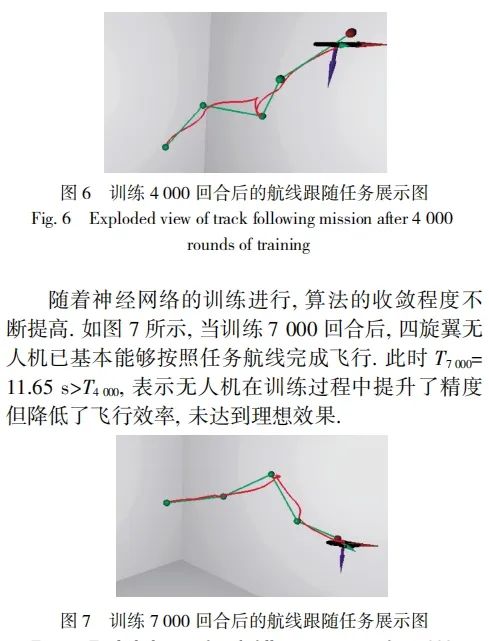
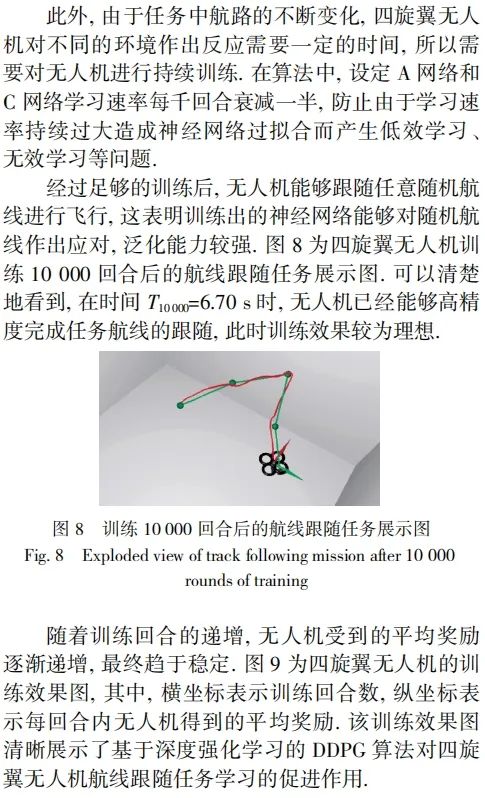
3 Simulation experiments and result analysis

4 Conclusion
Statement: The articles and pictures reproduced on the public account are for non-commercial education and scientific research purposes for everyone's reference and discussion, and do not mean to support their views or confirm the authenticity of their contents. The copyright belongs to the original author. If the reprint involves copyright and other issues, please contact us immediately to delete it.
"Artificial Intelligence Technology and Consulting" released