Calculation of some parameters
1. Zero bias
If only one indicator is used to represent the accuracy of an IMU, it is undoubtedly the gyro bias. This is because: 1) The accuracy of the inertial navigation system mainly depends on the accuracy of the gyro device in the IMU, not the accuracy of the accelerometer; 2) The most important indicator of the accuracy of the gyro is the zero bias error, which basically determines the The error divergence speed when the guide works independently for a long time. However, what needs special attention here is that there are several types of gyro bias. When looking at product specifications, you must find out which gyro bias index it is.
When the gyroscope is stationary, the gyroscope will still be active, expressed as the equivalent input angular rate corresponding to the average value of the output measured within a specified time, and the unit is °/h, °/s. Ideally, this value should be the component of the earth's rotation angular velocity. When the angular velocity input is zero, the output of the gyroscope is a slowly changing curve of a composite white noise signal, and the average value of the curve is the zero bias value.
Gyro bias: 0.00008333°/s=0.29998°/h
Accelerometer bias: 9.8*10e-04m/s^2=10e-04g=100ug
2. Random walk
Angular Random Walk: Angular Random Walk (ARW), is actually the angular rate white noise output by the gyroscope. Convert the unit:
0.0272250°/sqrt(s)=1.6335°/sqrt(hr)
which is relatively small in MEMS gyro.
Velocity Random Walk: Velocity Random Walk (VRW), which is the white noise of the accelerometer output ratio,
0.000001m/s/sqrt(s) = 0.000001 m/s^2/sqrt(Hz)=0.1ug/sqrt( Hz)
This noise level is very small.
3. The main points of Allan analysis of variance
One use of Allan's variance analysis is to analyze the performance of gyroscopes or compare the performance of different gyroscopes. Compared with other analysis methods, Allan's method is very useful and comprehensive. Another use is to obtain noise parameters for Kalman filter noise parameter setting of integrated navigation. Not all Allan variance noise coefficients are useful. The main useful ones are the angle random walk coefficient (used to set the Q matrix) and the zero bias instability coefficient (used to set the variance of the first-order Markov process). In fact, these two The magnitude of the coefficient is about the same, and it is useless if it is too fine. After all, the static performance of the gyro obtained by Allan variance analysis, the gyro error will change when the dynamic application is actually applied, and there may be an order of magnitude difference.
From the Allen variance curve, five types of noise of the IMU can be identified, namely: quantization noise, angle random walk, zero bias instability noise, angular rate random walk, and rate ramp, which are generally used in IMU noise identification Most of them are the middle three.
Quantization noise (Quantization Noise, QN)
The source of quantization noise is that the sensor undergoes the A/D conversion process, that is, there is a quantization process of converting analog quantities to digital quantities, and then there is bound to be information loss in this process, so quantization noise Represents the minimum resolution level detected by the sensor.
Quantization noise has a wide bandwidth and belongs to high-frequency noise. In practical applications, it can be processed by low-pass filtering or mostly filtered out by the navigation attitude update (integration) link, so it generally has little impact on system accuracy.
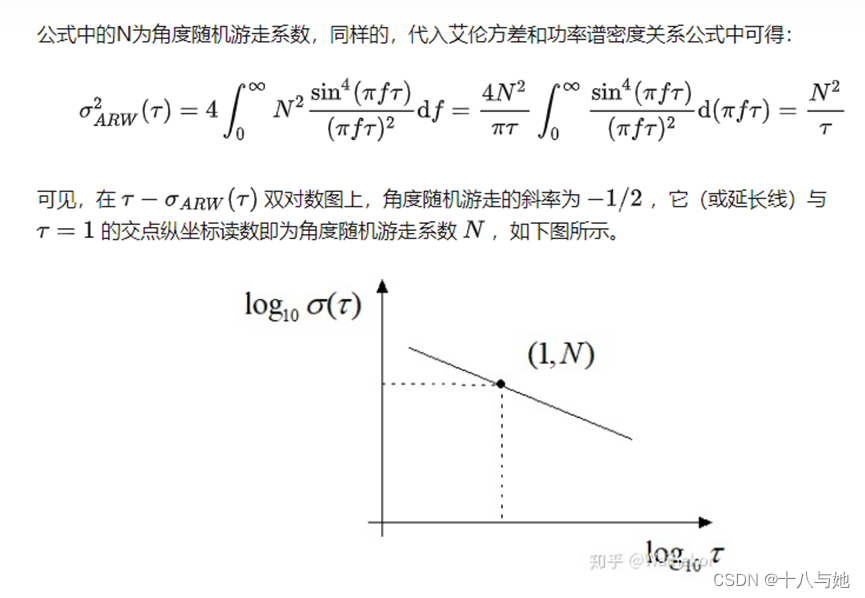
Angular Random Walk (Angular Random Walk, ARW)
If the angular velocity of the gyroscope is Gaussian white noise, then the angle obtained by the integration will behave as an angular random walk phenomenon. According to the random process theory, the random walk is an independent incremental process, which means that the angular rate white noise is integrated at two adjacent sampling moments, and the integral values in different periods are not correlated with each other.
Angle random walk is a very important noise parameter of the gyroscope, which needs to be identified when setting the P array in the Kalman filter. If the gyroscope angle incremental signal is used, because the incremental output is an integral process, the angle random walk coefficient of Allan variance has nothing to do with the sampling frequency, but if the angular rate data is directly sampled, it is recommended to increase the sampling frequency as much as possible to reduce the information The loss, such as taking twice the bandwidth frequency, can reach 4 to 6 times or more.
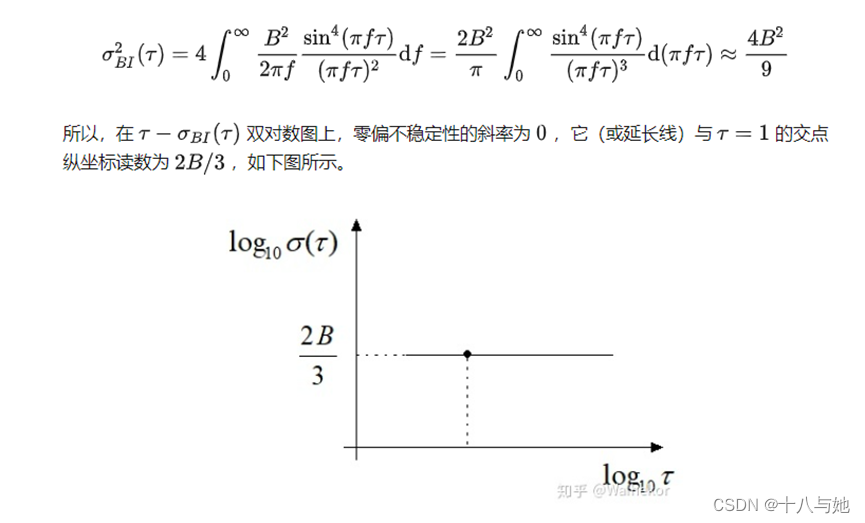
Bias Instability Noise (Bias Instability, BI)
Bias Instability noise has low-frequency characteristics, and is manifested as a slow fluctuation of the bias over time in the gyro output.
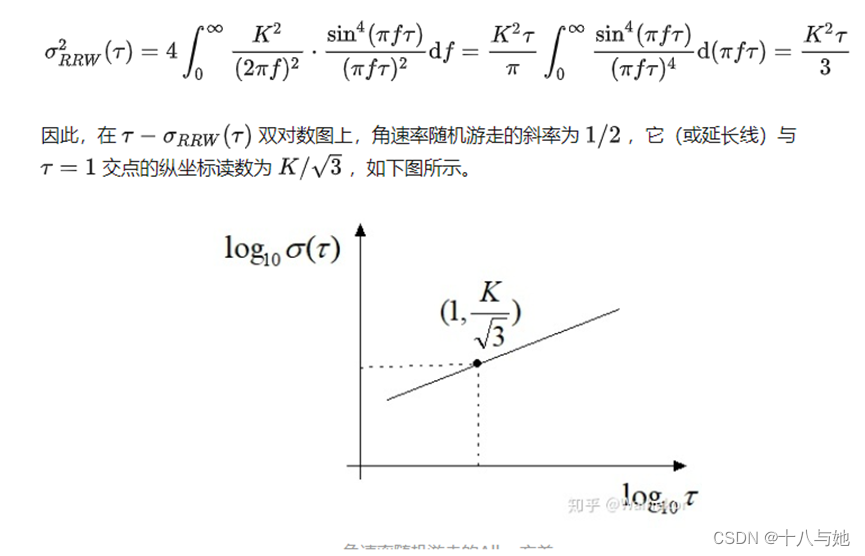
Angular rate random walk (Rate Random Walk, RRW)
is similar to the concept of angular velocity random walk. If the angular acceleration rate of the gyro is modeled as Gaussian white noise, the angular rate behaves as a random walk phenomenon.
Rate Ramp (RR)
If the angular rate output of the gyroscope changes slowly over time, such as due to changes in ambient temperature, there 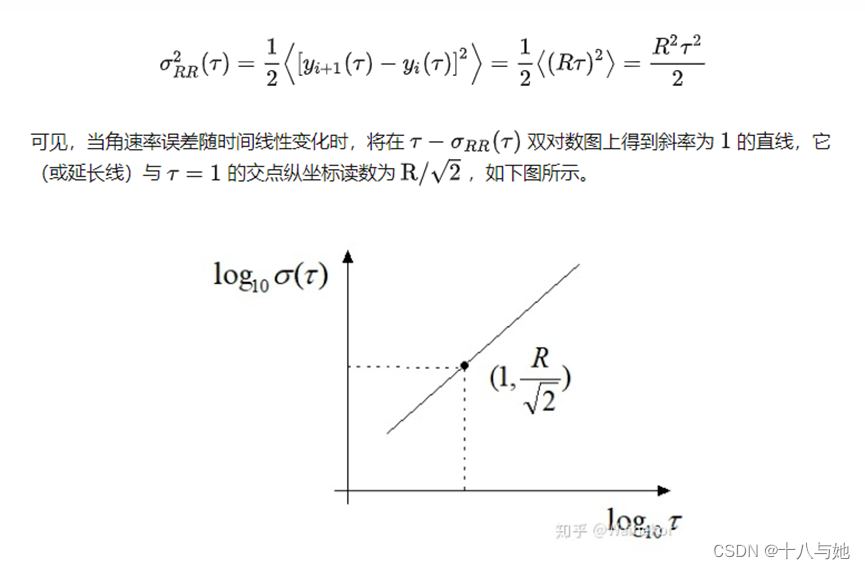
is a linear relationship between angular rate and test time
In fact, the angular rate ramp is more of a deterministic error than a random error. Angular rate ramps are often caused by system errors, such as slow changes in ambient temperature, which can be reduced by strict ambient temperature control or the introduction of compensation mechanisms