STM32F407ZGT6 is a high-performance ARM Cortex-M4 core 32-bit microcontroller (MCU) launched by STMicroelectronics. It is a member of the STM32F4 series, with powerful processing capabilities and rich peripheral functions, suitable for various application fields.
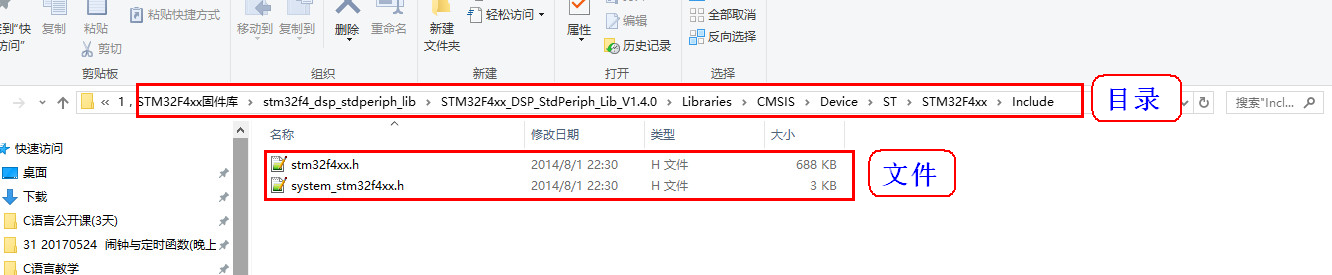
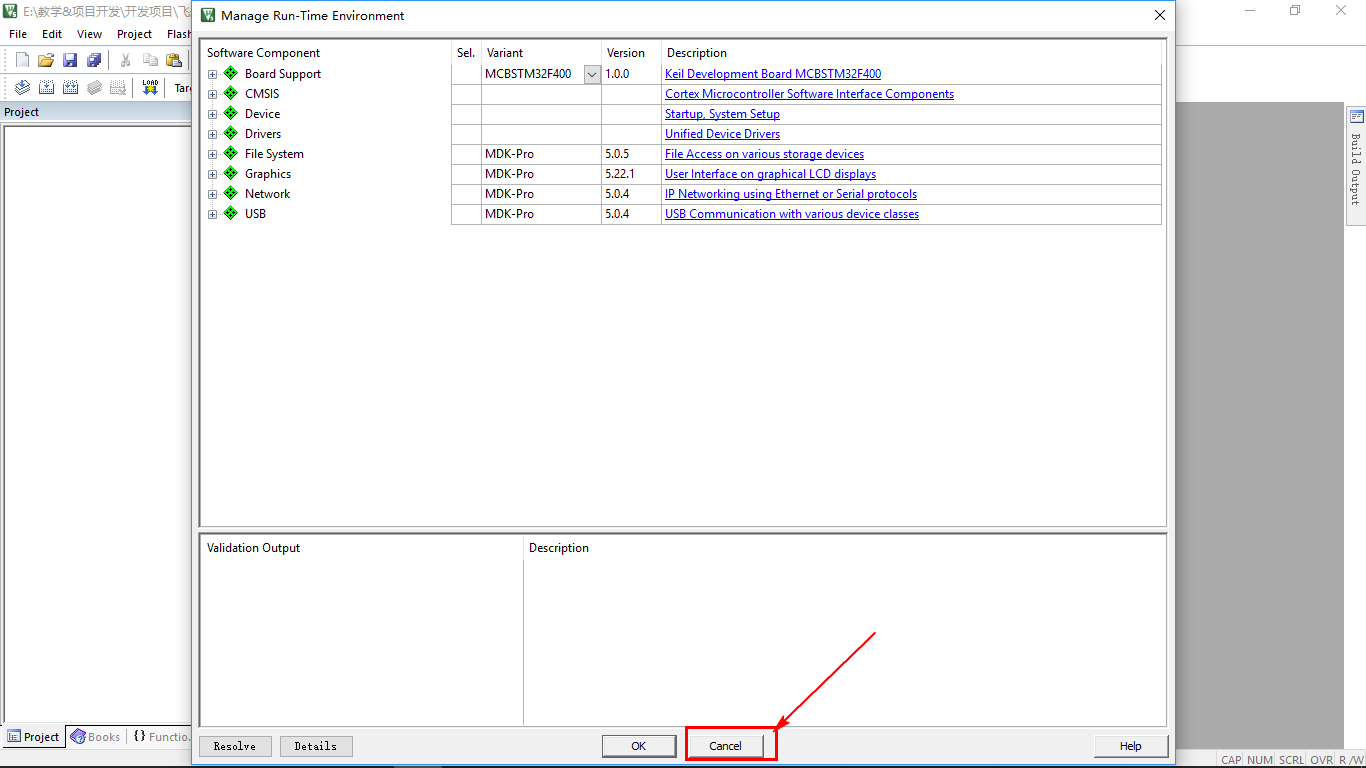
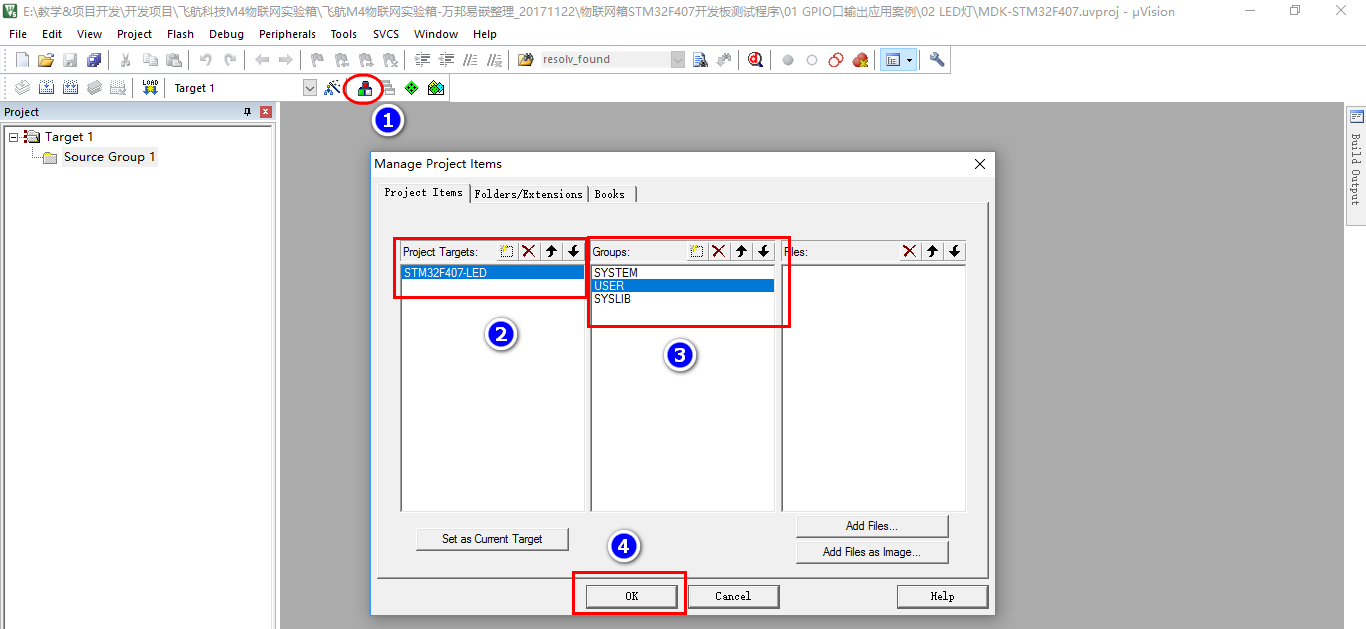
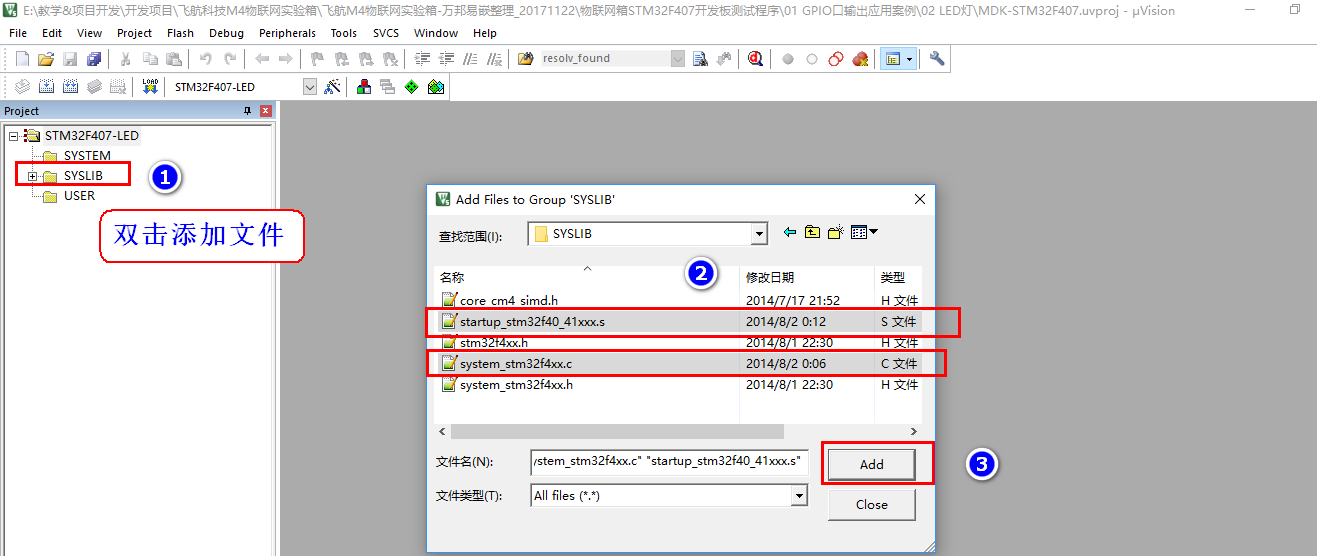
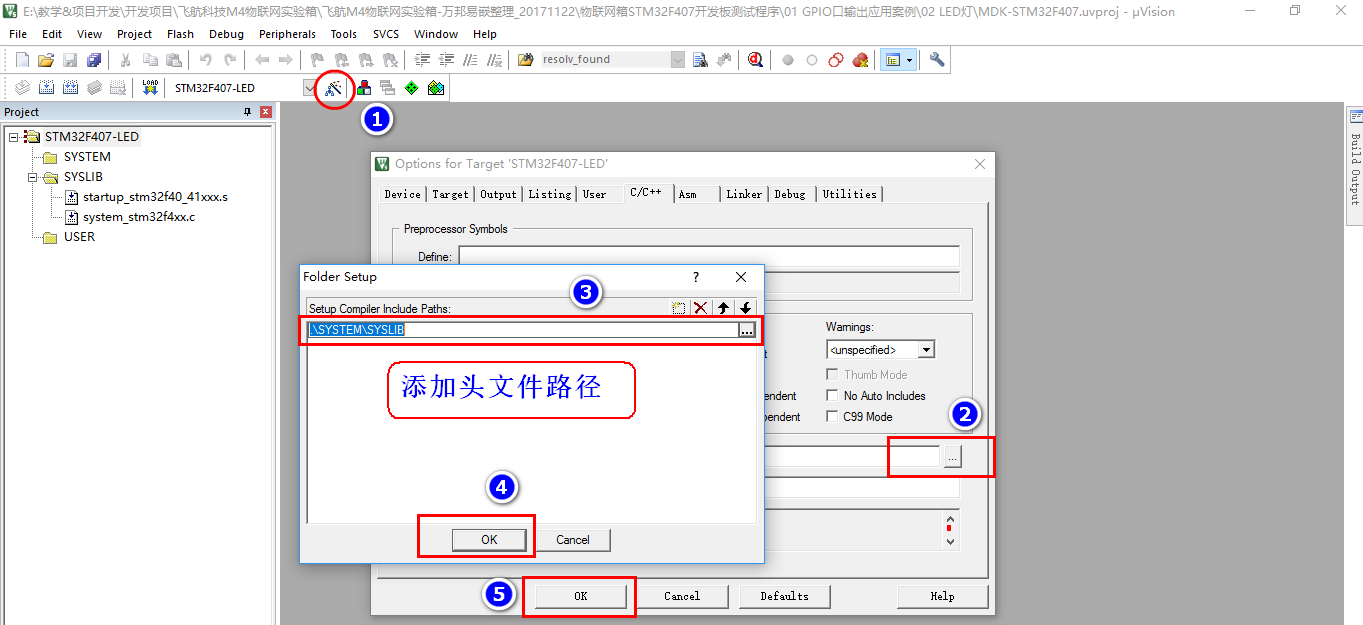
【1】F407 Dependent files required for construction projects





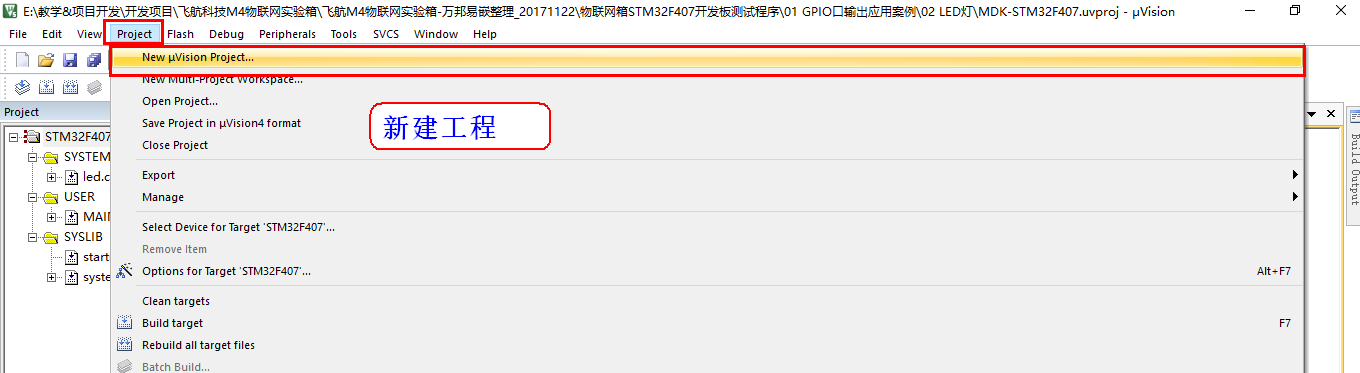
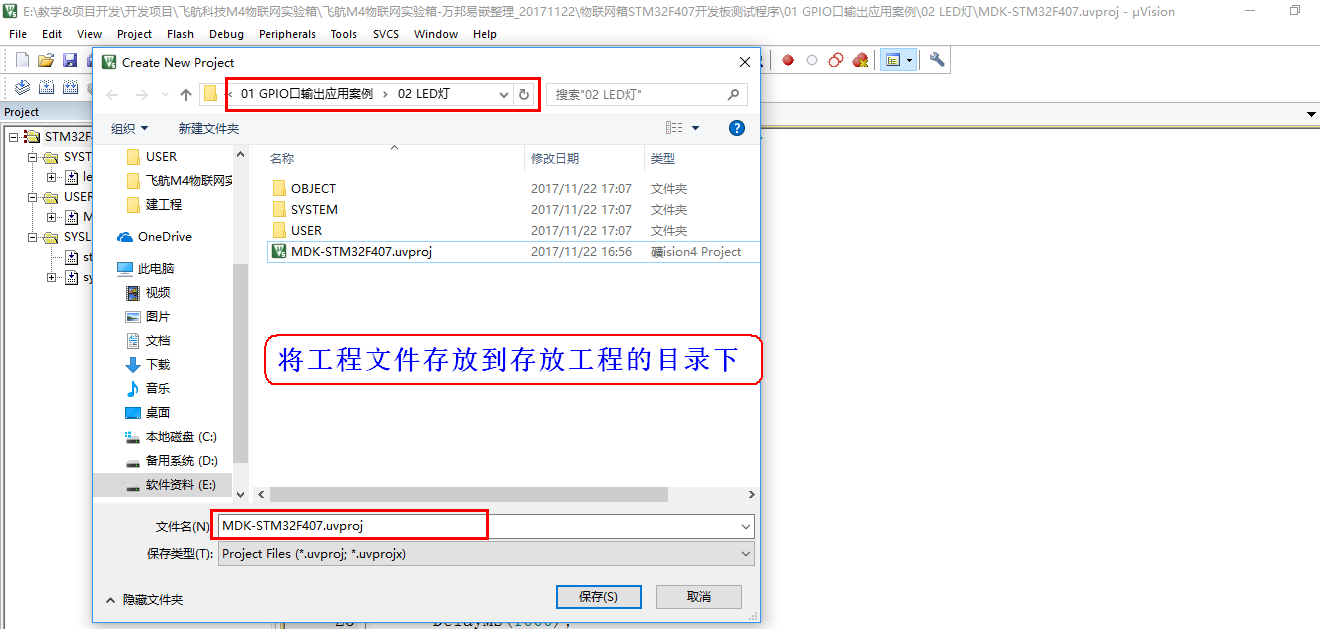
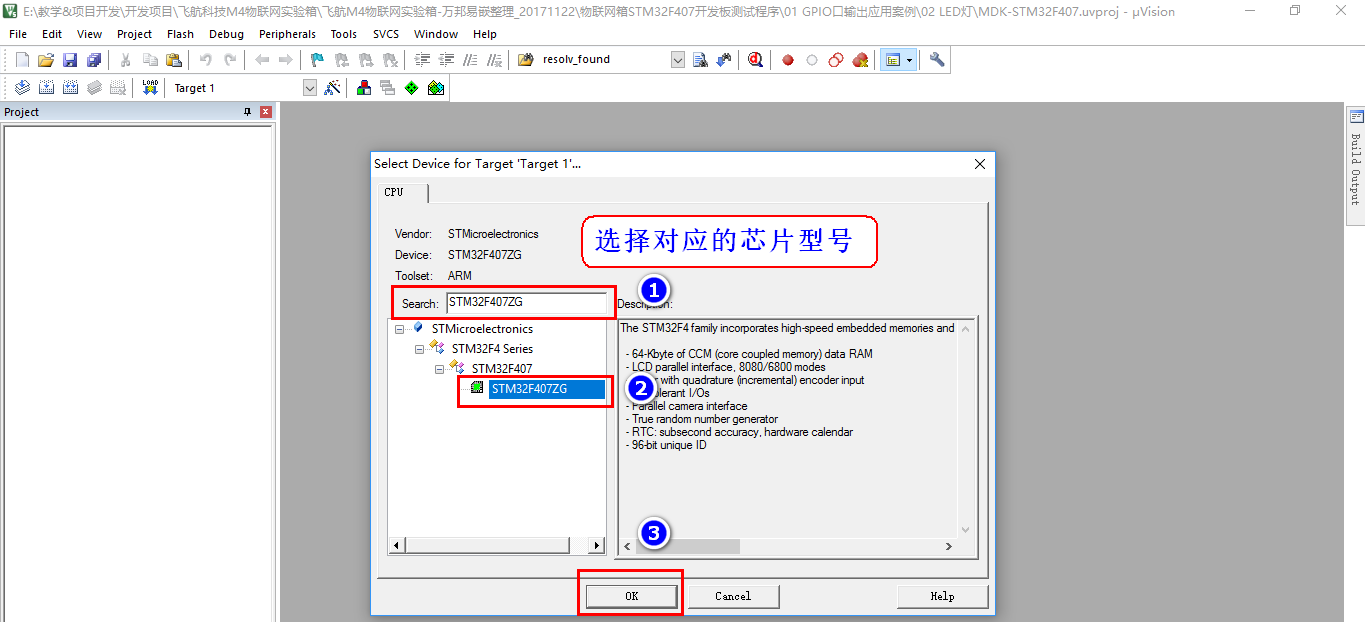
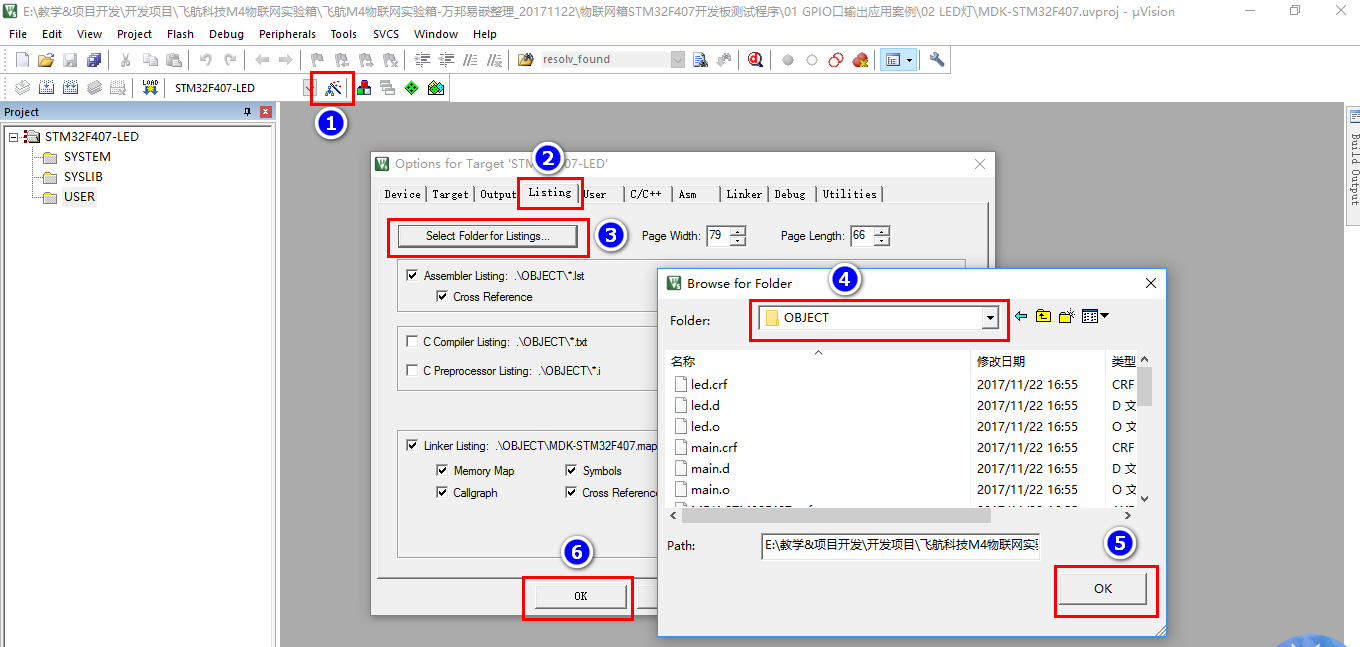
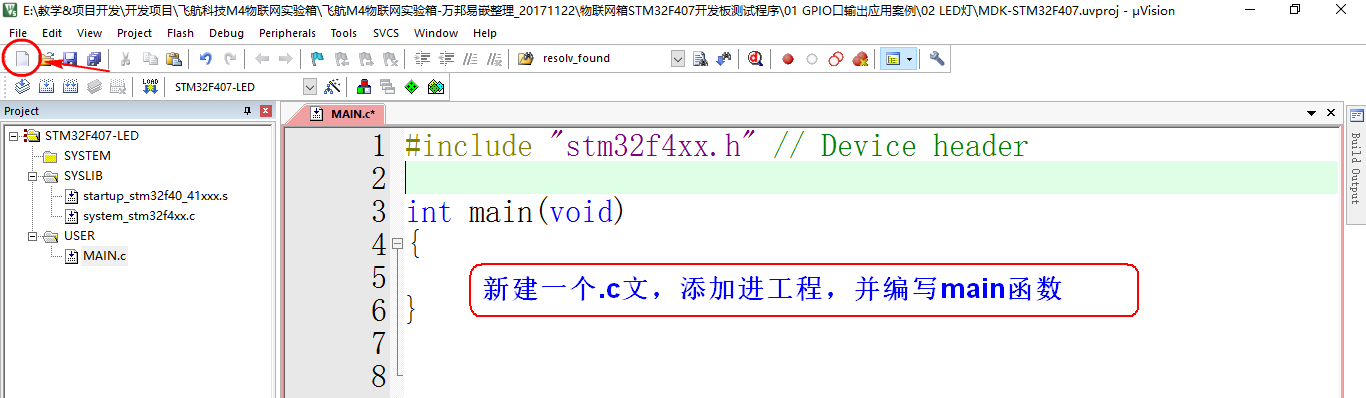
【2】 New construction
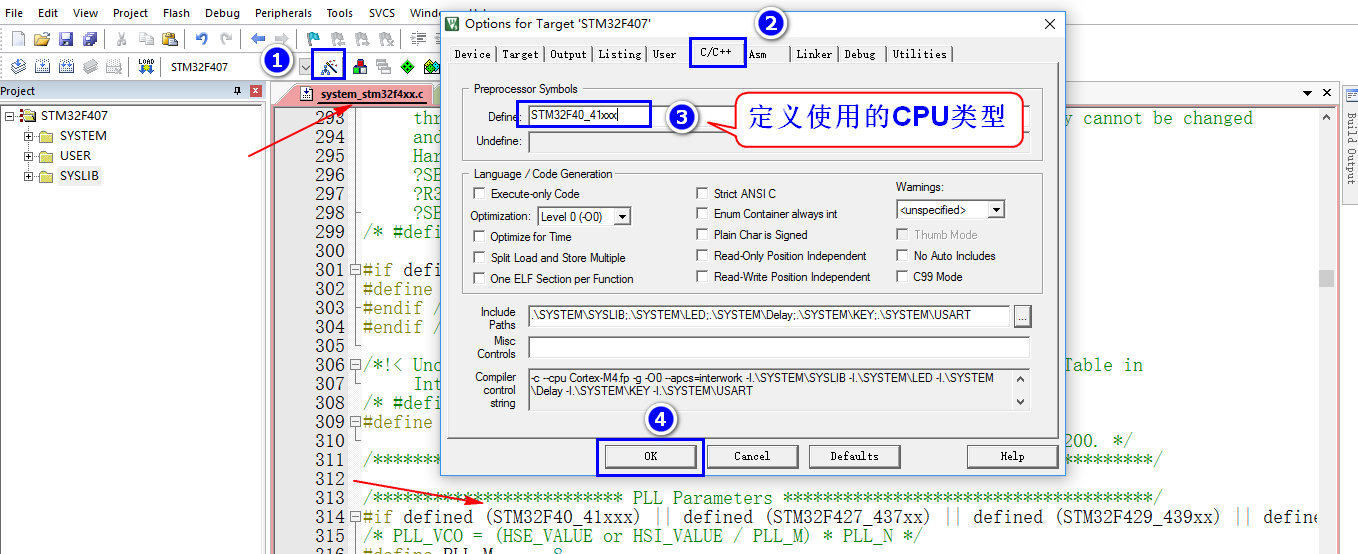
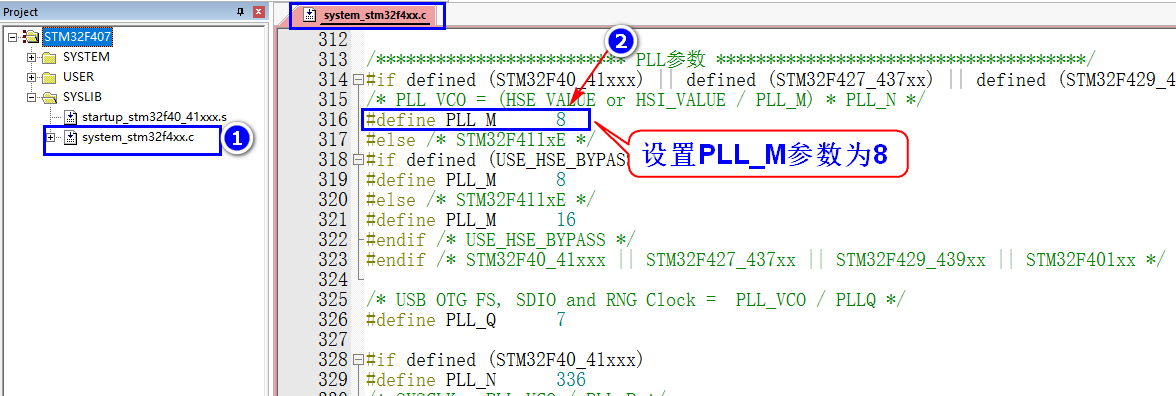
Note: The highest main frequency of STM32F4 is 168Mhz, so we generally set PLLCLK to 168Mhz (M=8, N=336, P=2), and select SYSCLK=PLLCLK through SW to get the system operating frequency of 168Mhz.
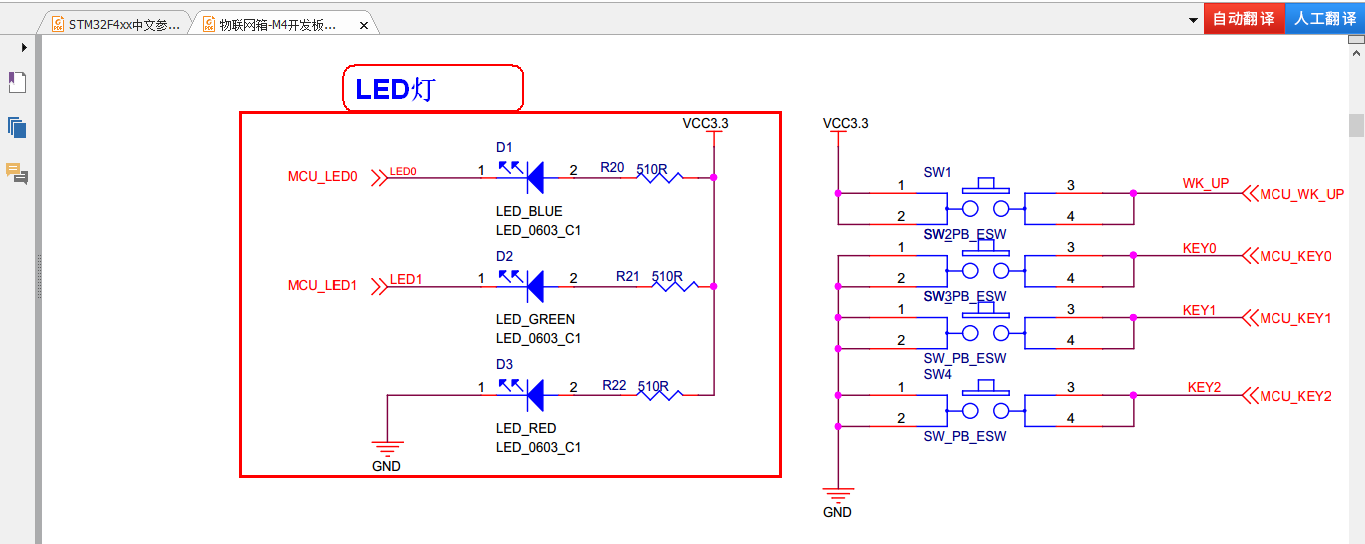
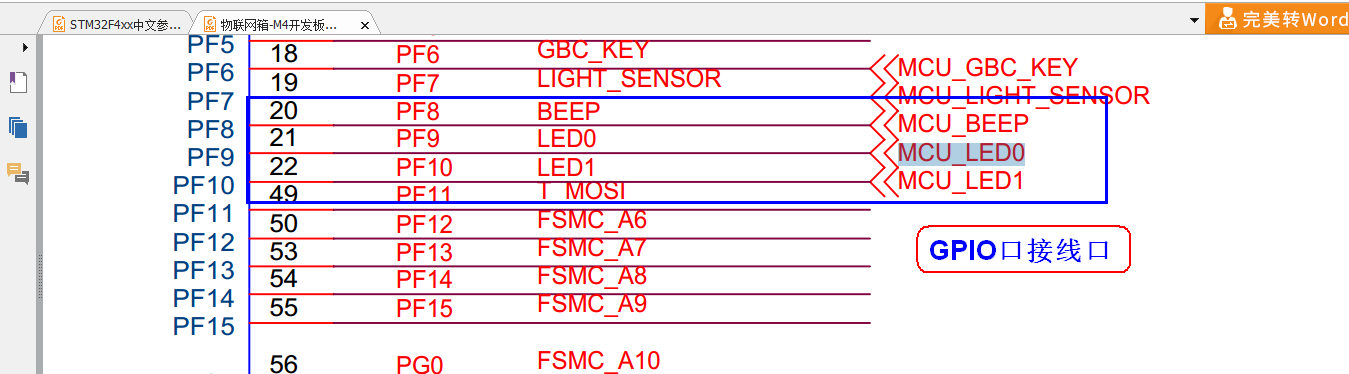
【3】Analysis of LED hardware schematic diagram
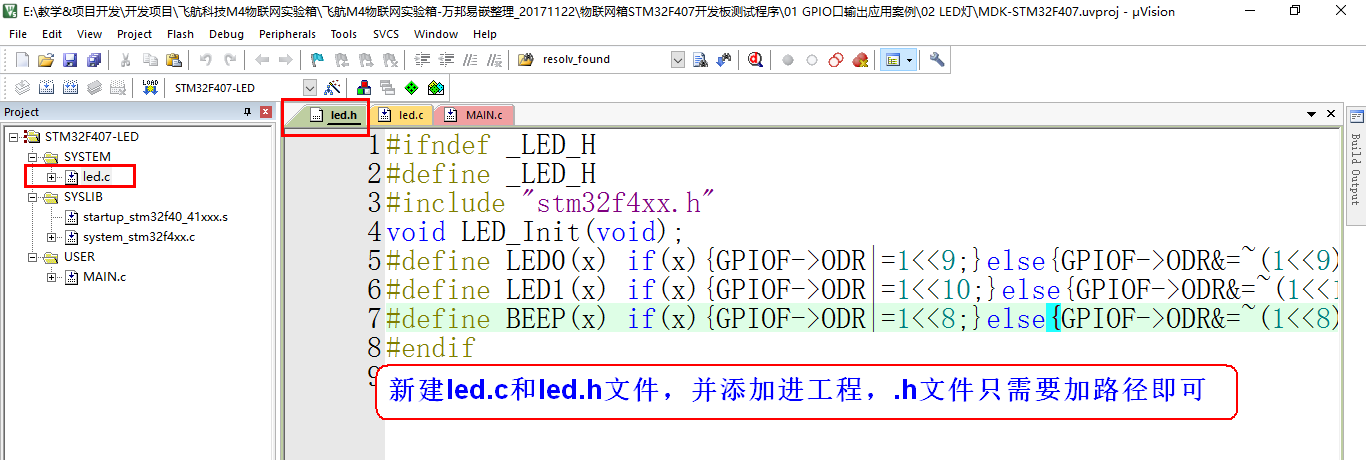
【4】Write LED driver code
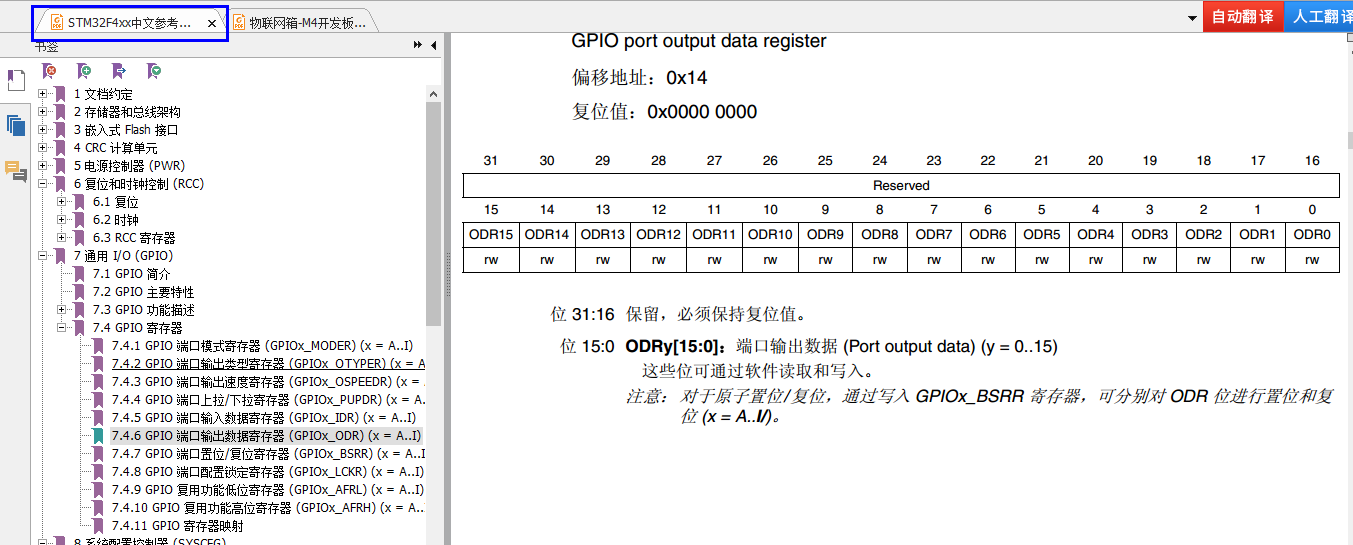
Check out the data sheet:
The code of the Led.c file is as follows:
#include "led.h"
/*
函数功能:LED初始化
硬件连接:
PF8-->BEEP --高电平响
PF9-->LED0 --低电平亮
PF10->LED1 --低电平亮
*/
void LED_Init(void)
{
/*1. 开时钟*/
RCC->AHB1ENR|=1<<5;//使能PORTF时钟
/*2. 配置GPIO口模式*/
GPIOF->MODER&=~(0x3<<8*2); //清除模式
GPIOF->MODER|=0x1<<8*2; //配置输出模式
GPIOF->MODER&=~(0x3<<9*2); //清除模式
GPIOF->MODER|=0x1<<9*2; //配置输出模式
GPIOF->MODER&=~(0x3<<10*2); //清除模式
GPIOF->MODER|=0x1<<10*2; //配置输出模式
/*3. 配置GPIO口输出类型*/
GPIOF->OTYPER&=~(0x1<<8); //0表示推挽输出
GPIOF->OTYPER&=~(0x1<<9); //0表示推挽输出
GPIOF->OTYPER&=~(0x1<<10); //0表示推挽输出
/*4. 配置GPIO口输出速度*/
GPIOF->OSPEEDR&=~(0x3<<8*2); //清除之前配置
GPIOF->OSPEEDR|=0x2<<8*2; //50MHZ输出速度
GPIOF->OSPEEDR&=~(0x3<<9*2); //清除之前配置
GPIOF->OSPEEDR|=0x2<<9*2; //50MHZ输出速度
GPIOF->OSPEEDR&=~(0x3<<8*2); //清除之前配置
GPIOF->OSPEEDR|=0x2<<10*2; //50MHZ输出速度
/*5. 配置GPIO口输出默认电平*/
GPIOF->ODR|=1<<10; //输出1
GPIOF->ODR|=1<<9; //输出1
GPIOF->ODR&=~(1<<8); //输出0
}
Led.h code is as follows
#ifndef _LED_H
#define _LED_H
#include "stm32f4xx.h"
void LED_Init(void);
#define LED0(x) if(x){
GPIOF->ODR|=1<<9;}else{
GPIOF->ODR&=~(1<<9);}
#define LED1(x) if(x){
GPIOF->ODR|=1<<10;}else{
GPIOF->ODR&=~(1<<10);}
#define BEEP(x) if(x){
GPIOF->ODR|=1<<8;}else{
GPIOF->ODR&=~(1<<8);}
#endif
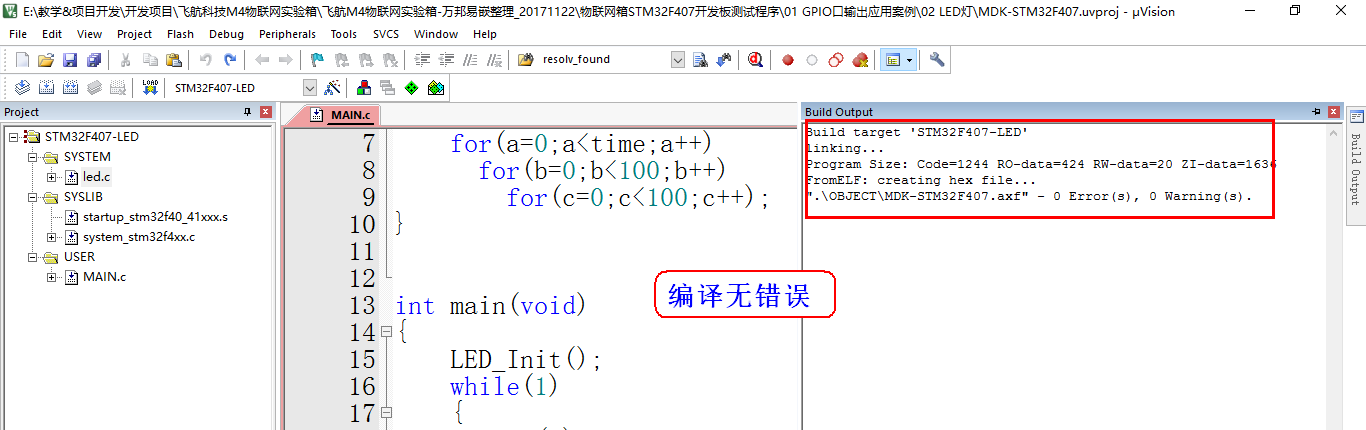
Main.c code is as follows
#include "stm32f4xx.h" // Device header
#include "led.h"
void DelayMs(u32 time)
{
u32 a,b,c;
for(a=0;a<time;a++)
for(b=0;b<100;b++)
for(c=0;c<450;c++);
}
int main(void)
{
LED_Init();
while(1)
{
LED0(0);
LED1(0);
// BEEP(0);
DelayMs(1000);
LED0(1);
LED1(1);
//BEEP(1);
DelayMs(1000);
}
}
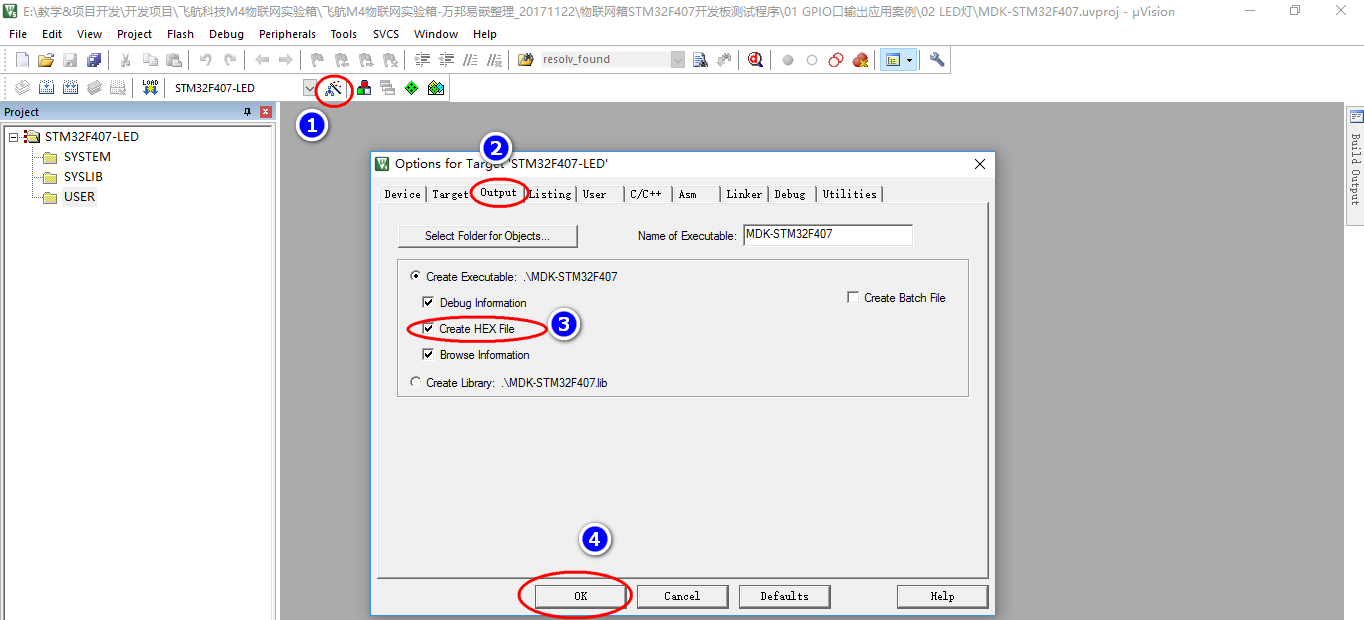
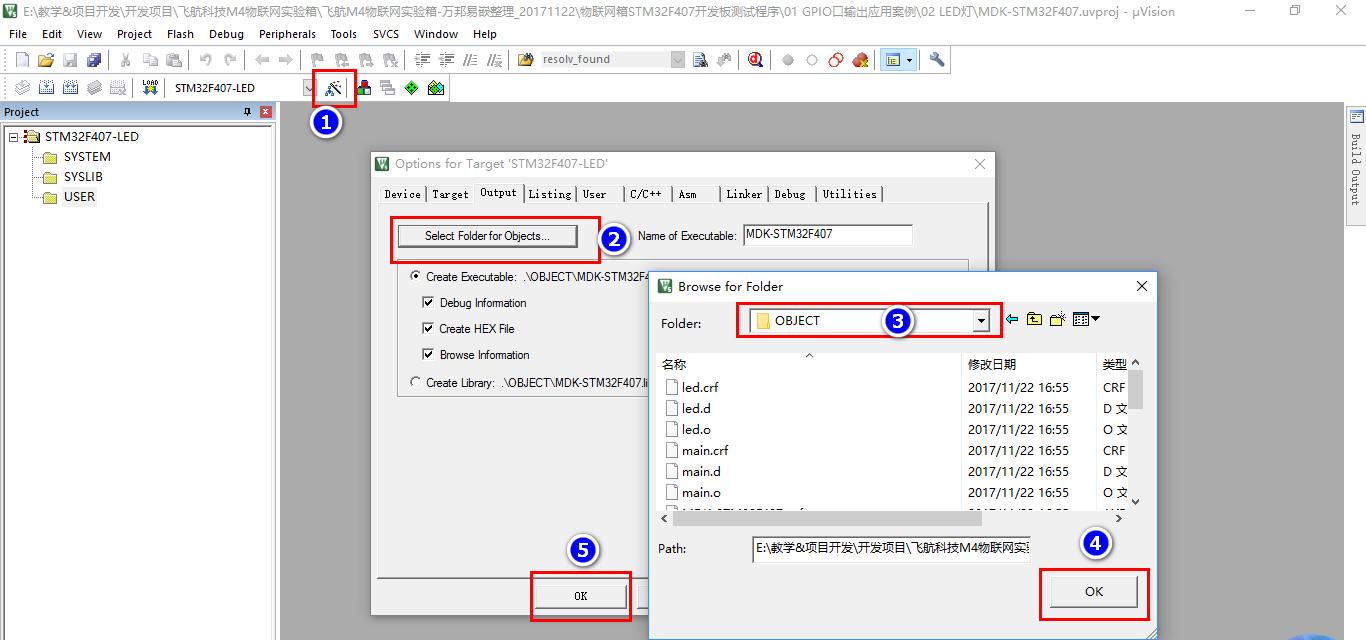
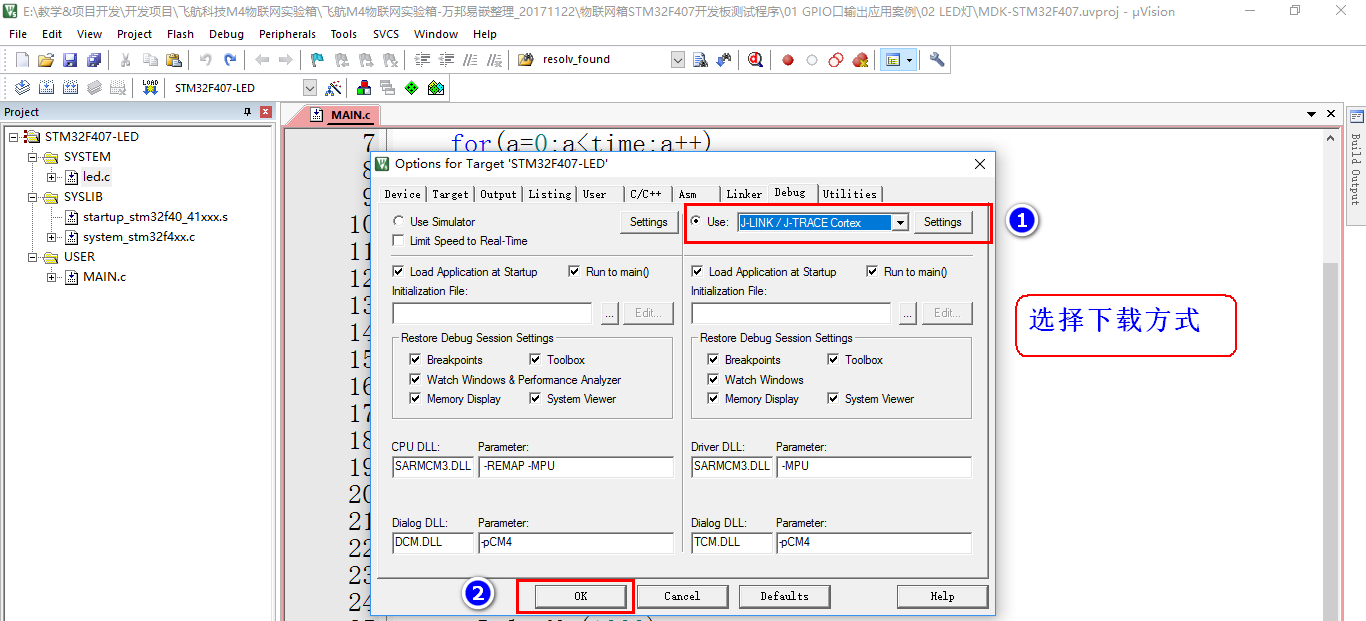
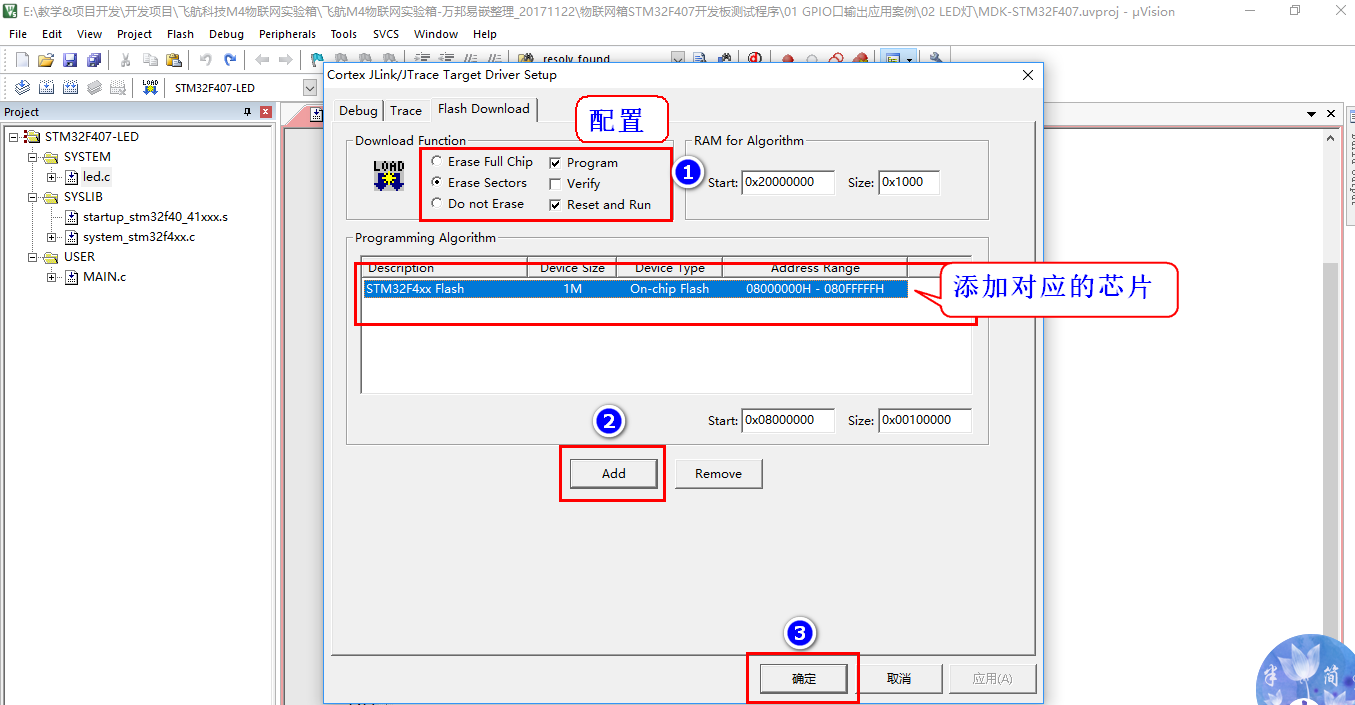
【5】Compile code configuration download
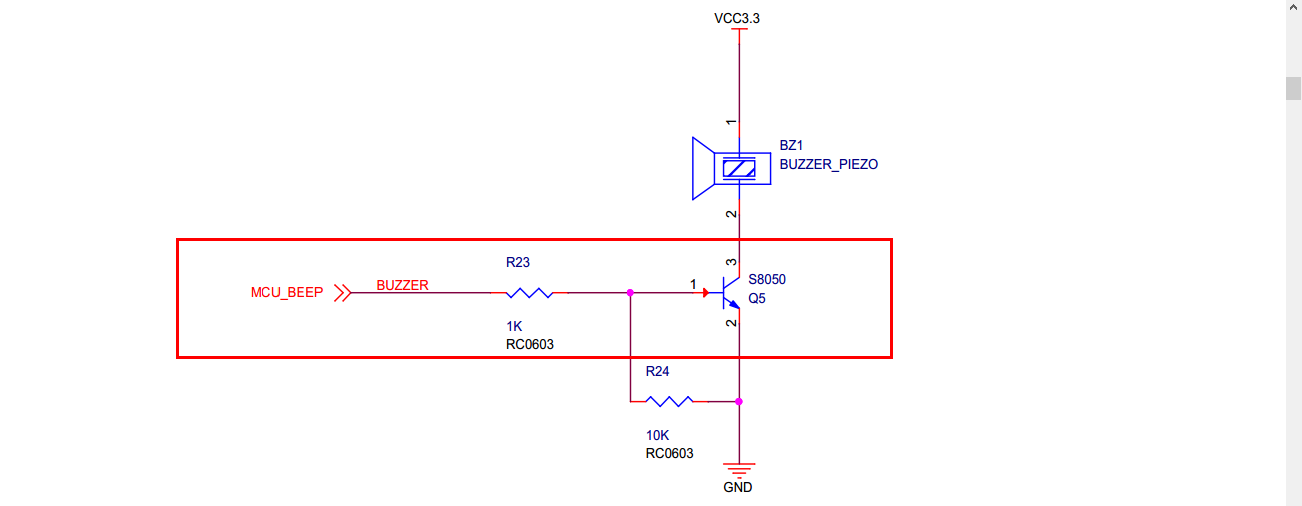
【6】Write passive buzzer driver code
Delay.c delay function code
#include "delay.h"
/*
功能 :毫秒级别的延时函数
参数 :填入延时的时间
返回值:无
说 明:频率在168MHZ情况下使用
*/
void DelayMs(u32 time)
{
u32 a,b,c;
for(a=0;a<time;a++)
for(b=0;b<100;b++)
for(c=0;c<450;c++);
}
/*
功能 :微秒级别的延时函数
参数 :填入延时的时间
返回值:无
说 明:频率在168MHZ情况下使用
*/
void DelayUs(u32 time)
{
u32 k;
while(time--)
{
k=40;
while(k--);
}
}
Led.c code
#include "led.h"
/*
函数功能:LED初始化
硬件连接:
PF8-->BEEP --高电平响
PF9-->LED0 --低电平亮
PF10->LED1 --低电平亮
*/
void LED_Init(void)
{
/*1. 开时钟*/
RCC->AHB1ENR|=1<<5;//使能PORTF时钟
/*2. 配置GPIO口模式*/
GPIOF->MODER&=~(0x3<<8*2); //清除模式
GPIOF->MODER|=0x1<<8*2; //配置输出模式
GPIOF->MODER&=~(0x3<<9*2); //清除模式
GPIOF->MODER|=0x1<<9*2; //配置输出模式
GPIOF->MODER&=~(0x3<<10*2); //清除模式
GPIOF->MODER|=0x1<<10*2; //配置输出模式
/*3. 配置GPIO口输出类型*/
GPIOF->OTYPER&=~(0x1<<8); //0表示推挽输出
GPIOF->OTYPER&=~(0x1<<9); //0表示推挽输出
GPIOF->OTYPER&=~(0x1<<10); //0表示推挽输出
/*4. 配置GPIO口输出速度*/
GPIOF->OSPEEDR&=~(0x3<<8*2); //清除之前配置
GPIOF->OSPEEDR|=0x2<<8*2; //50MHZ输出速度
GPIOF->OSPEEDR&=~(0x3<<9*2); //清除之前配置
GPIOF->OSPEEDR|=0x2<<9*2; //50MHZ输出速度
GPIOF->OSPEEDR&=~(0x3<<8*2); //清除之前配置
GPIOF->OSPEEDR|=0x2<<10*2; //50MHZ输出速度
/*5. 配置GPIO口输出默认电平*/
GPIOF->ODR|=1<<10; //输出1
GPIOF->ODR|=1<<9; //输出1
GPIOF->ODR&=~(1<<8); //输出0
}
/*
1/2000HZ=0.0005s=0.5ms=500us
1/4000HZ=0.25ms
控制蜂鸣器:产生2KHZ~5KHZ的方波即可
*/
void BEEP_Ctlrl(u8 cmd,u32 time)
{
u8 i;
if(cmd) //打开蜂鸣器
{
for(i=0;i<time;i++)
{
BEEP(0);
DelayUs(250);
BEEP(1);
DelayUs(250);
}
}
else //关闭蜂鸣器
{
BEEP(0);
for(i=0;i<time;i++)DelayUs(250);
}
}
Mian.c main function code
#include "stm32f4xx.h" // Device header
#include "led.h"
#include "delay.h"
int main(void)
{
u8 i;
LED_Init();
while(1)
{
i=!i;
BEEP_Ctlrl(i,200);
}
}