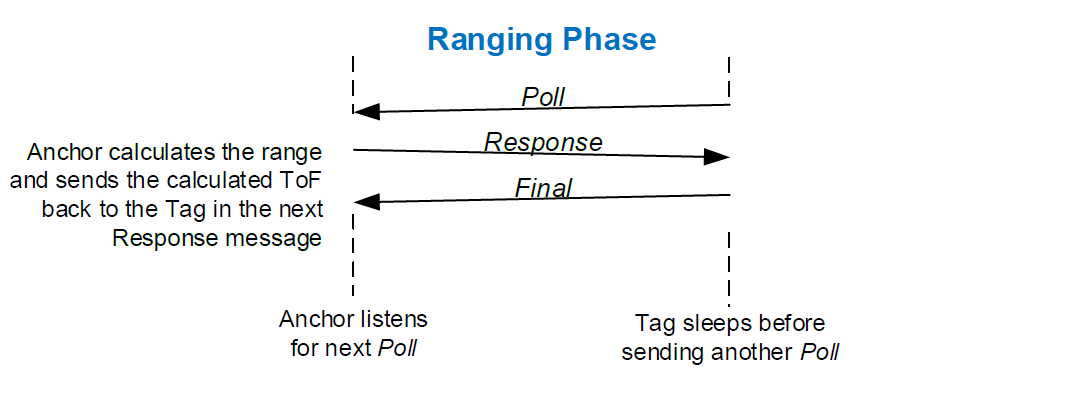
TWR测距方法是目前推广的一种测距方法,也是目前大多数用户使用的测距方法,具体原理如下图
具体算法参见:DW1000 用户手册中文版 附录3:双向测距(Two-Way Ranging)
原理很简单,节点A发送信息Poll给节点B,节点B应答Responese,节点A收到应答再回复一条Final信息。
在我们框架里实现代码也是非常容易
A 第一个信息Poll的代码
发送给节点B,我们测试的时候,节点B地址=节点A地址+1
发送的数据包,第一个个信息"P"指明了是一个Poll信息
msg_f_send.destAddr[0] =(SHORT_ADDR+1) &0xFF; msg_f_send.destAddr[1] = ((SHORT_ADDR+1)>>8) &0xFF; msg_f_send.seqNum = distance_seqnum; msg_f_send.messageData[0]='P';//Poll message //后面修改这个数据长度 dwt_writetxdata(psduLength, (uint8 *)&msg_f_send, 0) ; // write the frame data dwt_writetxfctrl(psduLength, 0); dwt_starttx(DWT_START_TX_IMMEDIATE); while (!(dwt_read32bitreg(SYS_STATUS_ID) & SYS_STATUS_TXFRS)) { }; dwt_enableframefilter(DWT_FF_DATA_EN); dwt_setrxtimeout(RESP_RX_TIMEOUT_UUS*10); dwt_rxenable(0); /* Clear good RX frame event in the DW1000 status register. */ if(++distance_seqnum == 255) distance_seqnum = 0; Tag_State = TAG_POLL_SENT;
B 节点B收到Poll信息,并返回Responese 信息
节点B接到Poll信息的时候,通过get_rx_timestamp_u64()读取了poll信息接收时间戳。
其中,第一个个信息"A"指明了是一个Responese信息,是对poll信息的应答(ack)
case 'P': /* Retrieve poll reception timestamp. */ poll_rx_ts = get_rx_timestamp_u64(); /* Set expected delay and timeout for final message reception. */ // dwt_setrxaftertxdelay(RESP_TX_TO_FINAL_RX_DLY_UUS); // dwt_setrxtimeout(FINAL_RX_TIMEOUT_UUS); msg_f_send.messageData[0]='A';//Poll ack message //后面修改这个数据长度 dwt_writetxdata(psduLength, (uint8 *)&msg_f_send, 0) ; // write the frame data dwt_writetxfctrl(psduLength, 0); dwt_starttx(DWT_START_TX_IMMEDIATE); while (!(dwt_read32bitreg(SYS_STATUS_ID) & SYS_STATUS_TXFRS)) { }; break;
关于发送response信息的地址,在收到信息的时候,会把源地址保存在目标地址,所以这个信息一定是返回给A节点的。
dwt_readrxdata(rx_buffer, frame_len, 0); msg_f = (srd_msg_dsss*)rx_buffer; //copy source address as dest address msg_f_send.destAddr[0] = msg_f->sourceAddr[0]; msg_f_send.destAddr[1] = msg_f->sourceAddr[1]; //copy source seqNum msg_f_send.seqNum = msg_f->seqNum;
C 节点A收到节点B的response信息
节点A收到信息,会收集开始发送的poll信息时间戳以及接收到response的时间戳。
poll_tx_ts = get_tx_timestamp_u64();
resp_rx_ts = get_rx_timestamp_u64();
同时用delayed tx方式算出finnal信息发送时间,并一同打包发送给节点B
其中第一个信息“F”表明这个信息是final 信息
case 'A'://Poll ack message if(Tag_State == TAG_POLL_SENT) { dwt_write32bitreg(SYS_STATUS_ID, SYS_STATUS_RXFCG | SYS_STATUS_TXFRS); //OLED_ShowString(0, 2,"Rec ACK"); /* Retrieve poll transmission and response reception timestamp. */ poll_tx_ts = get_tx_timestamp_u64(); resp_rx_ts = get_rx_timestamp_u64(); /* Compute final message transmission time. See NOTE 9 below. */ // final_tx_time = ( resp_rx_ts + (RESP_RX_TO_FINAL_TX_DLY_UUS * UUS_TO_DWT_TIME)) >> 8; final_tx_time = dwt_readsystimestamphi32() + 0x17cdc00/10;//1ms dwt_setdelayedtrxtime(final_tx_time); /* Final TX timestamp is the transmission time we programmed plus the TX antenna delay. */ final_tx_ts = (((uint64)(final_tx_time & 0xFFFFFFFE)) << 8); //final_tx_ts = (((uint64)(final_tx_time & 0xFFFFFFFE)) << 8) + TX_ANT_DLY; msg_f_send.messageData[0]='F';//Final message /* Write all timestamps in the final message. See NOTE 10 below. */ final_msg_set_ts(&msg_f_send.messageData[FINAL_MSG_POLL_TX_TS_IDX], poll_tx_ts); final_msg_set_ts(&msg_f_send.messageData[FINAL_MSG_RESP_RX_TS_IDX], resp_rx_ts); final_msg_set_ts(&msg_f_send.messageData[FINAL_MSG_FINAL_TX_TS_IDX], final_tx_ts); dwt_writetxdata(psduLength, (uint8 *)&msg_f_send, 0) ; // write the frame data dwt_writetxfctrl(psduLength, 0); dwt_starttx(DWT_START_TX_DELAYED); // dwt_starttx(DWT_START_TX_IMMEDIATE); while (!(dwt_read32bitreg(SYS_STATUS_ID) & SYS_STATUS_TXFRS)) { }; // Tag_State = TAG_POLL_ACK; Tag_State = TAG_INIT; } break;
D 节点B收到节点A发来的信息后,读取final信息的接收时间和上一个response信息的发送时间
resp_tx_ts = get_tx_timestamp_u64();
final_rx_ts = get_rx_timestamp_u64();
并通过函数final_msg_get_ts将节点A打包的三个时间信息解析出来
final_msg_get_ts(&msg_f->messageData[FINAL_MSG_POLL_TX_TS_IDX], &poll_tx_ts); final_msg_get_ts(&msg_f->messageData[FINAL_MSG_RESP_RX_TS_IDX], &resp_rx_ts); final_msg_get_ts(&msg_f->messageData[FINAL_MSG_FINAL_TX_TS_IDX], &final_tx_ts);
后面就是利用这些时间戳计算距离信息了,完整代码如下,算出距离信息,TWR算法就此结束。
case 'F': // OLED_ShowString(0, 2,"Rec Final"); /* Retrieve response transmission and final reception timestamps. */ resp_tx_ts = get_tx_timestamp_u64(); final_rx_ts = get_rx_timestamp_u64(); /* Get timestamps embedded in the final message. */ final_msg_get_ts(&msg_f->messageData[FINAL_MSG_POLL_TX_TS_IDX], &poll_tx_ts); final_msg_get_ts(&msg_f->messageData[FINAL_MSG_RESP_RX_TS_IDX], &resp_rx_ts); final_msg_get_ts(&msg_f->messageData[FINAL_MSG_FINAL_TX_TS_IDX], &final_tx_ts); /* Compute time of flight. 32-bit subtractions give correct answers even if clock has wrapped. See NOTE 10 below. */ poll_rx_ts_32 = (uint32)poll_rx_ts; resp_tx_ts_32 = (uint32)resp_tx_ts; final_rx_ts_32 = (uint32)final_rx_ts; Ra = (double)(resp_rx_ts - poll_tx_ts); Rb = (double)(final_rx_ts_32 - resp_tx_ts_32); Da = (double)(final_tx_ts - resp_rx_ts); Db = (double)(resp_tx_ts_32 - poll_rx_ts_32); tof_dtu = (int64)((Ra * Rb - Da * Db) / (Ra + Rb + Da + Db)); tof = tof_dtu * DWT_TIME_UNITS; distance = tof * SPEED_OF_LIGHT; //distance = distance - dwt_getrangebias(config.chan,(float)distance, config.prf);//距离减去矫正系数 msg_f_send.messageData[0]='d';//Poll ack message int temp = (int)(distance*100); distance_count++; sum_distance =sum_distance+distance; { sprintf(dist_str, "an0:%3.2fm", distance); OLED_ShowString(0, 4,dist_str); distance_count= 0; sum_distance = 0; }
源码下载请关注我们论坛51uwb.cn