Kinematic Information Aided User-Centric 5G Vehicular Networks in Support of Cooperative Perception for Automated Driving
LIQIN DING , (Member, IEEE), YANG WANG , PENG WU, (Student Member, IEEE), LIMING LI, and JILIANG ZHANG, (Member, IEEE)
摘要
自动驾驶汽车之间通过共享各自的感知信息实现对驾驶环境的合作感知,这对于确保复杂公共交通中自动驾驶的基本安全起着至关重要的作用。 但是,这对5G网络提出了从高数据速率和大用户密度到超高可靠性和低延迟等一系列苛刻要求,其中低延迟被认为是协作自动驾驶的关键推动力。
在本文中,我们提出了一种新的超密集5G车载网络架构,该架构通过运动信息辅助用户中心式访问,可以达到上述要求。 特别地,分布式本地访问和应用程序中心(LAACs)被设计为共同执行应用程序实现和集中式访问控制,从而可以在网络资源的动态管理中利用在应用程序层提取的车辆的运动学信息,以持续的保持车辆与其服务的LAAC之间的高性能无线通信 。
关于周期性协作感知消息(CSM)的上行链路传输,本文讨论了以运动信息辅助的用户中心式访问中关键元素的可能设计,包括访问点(AP)关联,无线电资源分配,移动性支持等 。关于实际网络部署和约束所带来的问题也有考虑。 此外,提出了一种实用的 benchmarking 访问策略集,该策略集解决了CSM的可靠性和延迟要求,并通过在高速公路和交叉路口场景下的仿真进行了评估。
Ⅰ.介绍
可以预见,汽车工业有两种新兴技术有一天可能会推动公路交通生态系统的转变:车辆通信和自动驾驶。 车辆通信使车辆彼此间(V2V)和可能影响其操纵的任何实体(路边基础设施(V2I),行人(V2P)或后端服务器(V2N))能交换有用的信息 V2X [1]。 当今可用的车辆通信标准,即基于IEEE 802.11p的专用短程通信(DSRC)/ ETSI ITS-G5和基于蜂窝的LTE-V [4],已经开始支持车辆和路侧设施间的信息传播,这些信息包括车辆状态信息(车辆类型,位置,速度,加速度等)和交通信息(交通信号灯的相位,道路工作,交通拥堵等)信息。目标有以下两点:1.实现协同感知;2.提供驾驶员辅助合作智能交通系统(C-ITS)应用列表,以提高道路安全性和效率。设施层消息,例如周期性的合作感知消息(CAM)和事件驱动的分散式环境通知消息(DENM)被标准化以传达这些状态信息。 通常,它们的有效载荷很小,并且在数据速率、端到端(E2E)延迟和可靠性方面,相关的通信要求不是很严格[5]。
另一方面,自动驾驶旨在通过将感知、计划和控制能力部署到车辆上,使驾驶员从繁琐的驾驶任务中解放出来并减少人为错误。 随着高性能硬件和算法的飞速发展,近年来自动驾驶汽车的发展正在加速。到目前为止,已经有自动乘用车和商用车在特定条件下(通常在低速下)可以行驶在专用道路上。 但是,车载感知系统的视线感知范围在根本上不足以支撑将其扩展到复杂的公共交通和高速公路上,并且它们对整个交通的安全性和效率的作用可能没有预期的乐观。 由于这些原因,将车辆通信集成到自动驾驶中是必然之选。
车辆通信对自动驾驶的支持作用存在不同阶段。 首先也是最重要的,期望通过在自动驾驶汽车之间共享感知信息来实现对复杂驾驶环境的充分、可靠感知。 与DSRC或LTE-V相比,这对基础车辆通信的要求要严格得多,并且有望通过5G来解决。由于生命之上,支持自动驾驶的车辆通信通常被归类为5G的一种典型超可靠、低延迟通信(URLLC)服务。然而,应该指出的是,实际的交通模式和通信要求可能会与一个用例有很大差异并且根据场景的不同而变化。在这项工作中,我们关注于合作感知,这不仅是因为合作感知在自动驾驶中起着基本作用,也因为它同时对数据速率、用户密度、网络吞吐量、传输可靠性和延迟提出了很高的要求,这将在第二部分中进行说明。
5G时代的移动网络正在网络架构和无线电接入技术上发生革命性的变化[22]。 移动边缘计算(MEC)正在将云计算功能部署在靠近无线接入网(RAN)的位置。 因此,将计算繁重的任务从终端设备转移到MEC服务器上成为了可能。同时,部分核心网络功能正在移至网络边缘以允许本地数据转发。接入点(AP)的超密集部署被认为是适应5G不断增长的流量密度的关键推动力。 但是,超密集网络(UDN)的部署存在重大挑战,这包括频繁切换和对目前以小区为中心的RAN的严重小区间干扰。为了应对这些挑战,通过软件定义网络(SDN)和利用网络功能虚拟化技术(NFV)来实现5G RAN的虚拟化,从而实现以用户为中心的访问方案。 在以用户为中心的UDN中,密集型AP被公式化为逻辑单元,并协同向用户提供访问服务。 尤其是,当以AP为逻辑单元时,它会随着用户的移动而动态更新,因此从用户的角度来看,它始终位于逻辑单元的中心,并始终具有较高的体验质量(QoE)。 无线电资源由分布式本地控制器管理,并以协调的方式提供给用户。 因此,可以潜在地实现高可靠性和低等待时间。
在以小区为中心的UDN中,高速移动的用户将经常跨越小区边界。 放大的切换速率和附近的大量AP将导致过多的信令开销。 因此,在引入以用户为中心的访问策略之前,UDN被认为不适合车辆通信。 在[33]中,强调了由高移动性引起的信道状态信息(CSI)老化问题。 提出了一种新颖的用于CSI估计的无线帧结构和一种考虑了CSI老化的空间域调度器,并展示了它们为用户吞吐量带来的收益。 在[37]中,使用随机几何工具分析了车辆的移动性能,包括切换率和开销率。 结果展示了信道容量和切换率之间的权衡。 在[38]中,考虑到车辆网络中的典型DL广播流量,扩展了以用户为中心的访问,使得用户中心式接入可以扩展到由一个逻辑单元服务的一组邻近的车辆上。本文作者致力于最大化服务车辆组的数量的功率分配的研究。然而,仍遗留了许多以用户为中心的超密集车载网络的基本问题。
我们确定了以用户为中心的超密集车载网络的以下关键特征,这些特征将促使我们的研究:
- 在实施过程中,最大的挑战是对移动性的支持,尤其是如何随着车辆的高速运动,动态管理时空频率资源。
- 车辆通信本质上是以应用程序为中心的。 因此,在系统设计中必须考虑各种应用程序的特定流量模式和通信要求。
- 车辆的运动在很大程度上是可预测的,这使得在应用层提取的车辆运动状态信息成为了移动支持的良好处理方式。
在这项工作中,我们通过共同考虑应用程序和通信,提出了一种运动信息辅助的以用户为中心的车载网络体系结构。 特别地,我们将一个部署在MEC服务器上的功能实体称为本地访问和应用程序中心(LAAC),它用来负责应用程序的实现和访问控制。我们讨论了LAAC如何利用车辆的运动学信息进行以用户为中心的访问,并同时满足严格的通信要求。还讨论了实际网络部署和约束带来的问题。此外,本文提出了用于协同感知消息(CSM)的周期性UL传输的基准策略,以实现协作感知,并通过仿真评估了它们的性能。
本文的其余部分安排如下。 第二部分介绍了合作感知对自动驾驶的概念和重要性,并总结了相关的交通模式和通信要求。 第三部分在解释了设计考虑因素后提出了建议的系统。 第四部分讨论了运动信息辅助的用户中心式的访问解决方案。 第五节给出了基准测试策略和仿真结果。第六节总结了本文。
Ⅱ.自动驾驶中的合作感知
在高动态驾驶环境下执行适当且可靠的感知是自动驾驶车辆安全操作的前提[2],[7]。 通过自动驾驶车辆之间交换本地感知的环境信息而实现的合作感知是克服独立车载感知系统缺点的关键。在本节中,我们从自动驾驶技术的角度说明概念和重要性,并确定交通模式和通信需求以支持 合作感知。
A.概念和重要性
当今开发的大多数自动车辆都配备了许多冗余的高性能传感器设置,包括雷达,激光雷达,单声道和立体声相机等。通过融合和处理这些传感器收集的数据,可以进行多种感知任务,例如感知道路形状、可驾驶区域、静态障碍物检测和运动物体的检测/跟踪/预测,这都是由感知系统完成的。 基于感知结果,开发了称为局部动态地图(LDM)的动态环境详细模型,并将其用于轨迹规划,运动规划和车辆控制。
然而,独立的感知策略具有根本的局限性[7],[8]。 板载传感器的感应范围受到限制,并限制在视线范围内,测量结果嘈杂且容易受到光线和天气等环境条件的影响(例如,在弱光或强光条件下,相机的性能会降低, 激光雷达无法在雨雪中正常工作)。这些因素在很大程度上不允许自动驾驶汽车在复杂环境中的操作,例如人口稠密的市区,那里的车辆经常穿过十字路口,街道被高楼大厦包围。 此外,当今大多数自动驾驶汽车所依赖的高清3D激光雷达的成本可能高于其驾驶的车辆,这对商业化构成了巨大障碍。
因此,提出了合作感知来克服这些缺点。 要求自动车辆彼此共享由其车载感知系统感测到的环境信息以及其自身的状态信息。 [8]之后,本文将携带感知信息的设施层消息 称为CSM 。 图1中示意性地示出了该想法:仅凭车载感知,自动车辆V1仅检测到四辆车辆。 通过融合由四个自动/合作车辆共享的CSM和CAM,该路段上的所有车辆都被捕获在LDM中。

合作感知的好处是多方面的。首先(无疑)可以将自动驾驶汽车的感知范围扩展到视线和视野之外,从而可以消除盲点。 反过来,减小了单个车辆的检测范围,使整个系统更能容忍由于不利的环境条件而导致的传感性能下降。 由传感器损坏或故障引起的单节点故障也可以大大减少。 此外,由于在分布位置和从不同角度获得了对同一感兴趣区域的多次测量,因此可以提高感知准确性和置信度。 最后(但并非最不重要)一点是,协作感知策略更具成本效益,因为具有中等性能的传感器将可以满足需求,并且通信设备通常价格便宜。 在实践中,传感器和感知基础设施也可以部署在道路上的战略性地点,例如交叉路口和汇合点,以进一步增强合作感知的优势。
B.交通模式和通信需求
尽管一些研究机构已经研究了合作感知[8],[11]-[14],但设施层消息尚未标准化。 尽管如此,还是达成了一些共识:为了传达有关驾驶环境的全面而最新的信息,CSM有望以高频率定期生成和传输,并包含车载对环境中检测到的物体的详细描述。 感知系统,包括主要属性,例如位置,航向,速度,加速度以及各自的置信度[8],[15],[16]。 由于驾驶环境是高度动态的,并且CSM中包含的信息很快就会过时,因此需要紧密的E2E延迟。 由于涉及生命安全的特性,要求非常高的传输可靠性。
下一代移动网络(NGMN)联盟估计,CSM的有效负载可能高达6000字节,以详细描述100个检测到的对象。 关于这一点,应保证E2E延迟低于20毫秒,可靠性高达99.999%[15]。 根据第三代合作伙伴计划(3GPP),CSM的有效载荷应至少包含1600字节以传达与10个检测到的对象有关的信息。在紧急情况下,要求E2E延迟和可靠性分别为3ms和99.999%,其他情况分别为10ms和99.99%[16]。 与合作感知相比,这些要求要严格得多,如表1所示。

由于有效载荷大、空中延迟限制严格,因此需要高传输速率。 此外,由于合作感知在高车辆密度的密集场景中重要性最高,因此需要大的网络吞吐量来支持每单位面积协同自动车辆产生的巨大数据量的传输。 因此,在某种程度上,合作感知涵盖了5G三种主要流量类型的关键特征,即增强型移动宽带(eMBB),大规模机器类型通信(mMTC)和URLLC。 最后,自动车辆的高机动性带来了额外的挑战:无线通道的时间变化迅速,多普勒传播可能很大,车辆非常频繁地穿越小区边界[40]。 使用有限的无线电资源来确保大量自动车辆的QoE一致性是一个至关重要的问题。
Ⅲ.支持5G的用户中心式车载网络架构
A.设计考量
LDM:局部动态地图
CAM:周期性的合作感知消息
CSM:携带感知信息的设施层消息
UDN:超密集网络
提出用于协作感知的分布式实施策略其实很简单。 即,每辆自动驾驶汽车从位于所需感知范围内的其他汽车收集CAM / CSM,并使用其车载计算机开发LDM。在这方面,一般考虑使用毫米波车辆通信技术用于短距离传感器信息交换[41]。但是,即使消息可以在延迟限制内可靠地传递,融合和处理由不同位置的车辆收集的大量环境数据本身在技术上也具有挑战性和计算上的要求[7]。
某个区域的LDM对于位于其中的车辆具有共同的收益,而CAM/CSM在车辆本地产生和使用。 因此,将协作感知应用程序卸载到5G的MEC服务器是非常有利的。一方面,由于MEC服务器的计算能力比车载计算机强大得多,因此可以减少融合多源数据所需的处理时间。另一方面,与基于云计算的实施相比,由于数据传输仍在本地,因此消除了因通过回程网络进行路由而导致的延迟。 作为结果,可以向用户提供最新的LDM。当自动驾驶汽车在交通中的百分比(即渗透率)足够大时,甚至可以以比CSM更高的速率生成LDM。 更重要的是,由于消息都汇聚到了强大的本地中心并由其分发,因此可以更好地解决诸如身份验证,授权和加密之类的安全问题,以保护车辆免受恶意攻击[9],[42]。 另外,通过利用LDM提供的交通环境信息,C-ITS应用程序也可以在MEC服务器上实现,并通过通信设备提供给传统车辆和其他道路用户。 从这个意义上说,MEC服务器充当C-ITS路边单元(RSU)。
这种本地集中实施策略的成功依赖于CSM的UL传输和LDM的DL分发的高性能。在DL中,可以增强多播和广播以有效分发LDM。 同时,在UL中由于临近车辆生成的CSM中包含的环境信息冗余性高、流量密度高,这与当今的蜂窝网络完全相反。 高流量密度要求可以通过AP的密集化来解决,并且以用户为中心的访问策略提供了在移动过程中控制干扰并维持高质量连接的方法。 然而,要为自动驾驶汽车服务并获得所有承诺的收益,先决条件是需要根据用户的移动主动进行服务AP更新和无线电资源管理。 现有研究中提出的以用户为中心的访问策略,包括那些专门用于车辆通信的策略[33],[37],[38],通常基于信道状态信息(CSI)。在车载网络中,考虑到AP的覆盖范围小和自动车辆的高移动性,它们的实现将导致极高的信令开销。 此外,协作感知以及许多其他用例都具有周期性的流量模式,因此半永久性调度更可减少开销并确保低延迟[18],这也使基于CSI的策略不适合。
幸运的是,在UDN中,车辆与服务AP之间的距离很短,这增加了视线(LOS)传输的可能性[30],[33],特别是因为轻量级AP可以部署在战略性地点。 结果,基于地理位置的通信和无线电资源管理技术[44]-[46]变得可行。
此外,用于自动驾驶的车辆的通信具有以下特殊性:
- 自动车辆的运动状态,即它们的位置,速度,加速度,航向等,将传递给应用中心。
- 尽管车辆具有高度机动性,但是它们的运动被限制在某些区域内,例如在道路上和停车场,并且必须遵守交通法规。 因此,他们的未来位置在很大程度上是可以预测的。
换句话说,在应用中心提取的车辆运动学信息为以用户为中心的车辆网络的移动性管理提供了良好的处理方法。
基于以上考虑,我们提出了一种5G功能的以用户为中心的自动驾驶汽车系统体系结构,该体系结构综合考虑了应用程序的实现和通信需求,并在以用户为中心的访问控制中利用了应用程序层运动学信息。
B.系统描述

我们提出的系统架构如图2所示并描述如下。 AP沿允许自动驾驶的道路密集部署。 现有的基础设施,例如 可以利用路灯和建筑物的墙壁进行部署。 宏基站(BS)也覆盖了整个区域。 AP和宏BS都通过前传链路连接到MEC服务器。MEC服务器可以与宏BS部署在相同的站点。 为车辆通信而分割的网络资源由托管在MEC服务器上的分布式LAAC管理。
LAAC由两个功能单元组成:一个APplcation Center(APC)(用于运行协作感知和其他C-ITS应用程序)和一个Access Control Center(ACC)(用于管理基础设施的访问和无线资源)来以用户中心的形式为自动/协同车辆提供通信服务。组织成逻辑cell的AP负责数据传输,这个传输可能发生在车辆通信专用频带上,例如广泛考虑的5.9 GHz频带上。而控制信令是使用不同的并且可能是较低的频带经由宏BS发送的。
通过ACC和APC之间的接口,由UL中的自动/协同车辆发送的设施层消息(例如CAM和CSM)从ACC传递到APC,之后回传协同感知产生的LDM和其他C-ITS应用数据。这些数据使用单播,多播或广播以DL形式发送到目标车辆。 同时,由ACC提取并包含在LDM中的所有车辆的运动信息都由ACC进行访问管理。
一旦车辆启动引擎,其通信终端就会打开,加入网络的请求会通过宏BS发送到位于核心网络的控制中心。 如果请求被批准,则将逻辑单元ID分配给车辆,并将管理任务移交给车辆所在区域的LAAC。 对于每个用户,ACC选择其逻辑小区的服务AP,确定协作的发送/接收策略,分配无线电资源,最重要的是,根据车辆的移动和网络拓扑的变化进行动态调整。
在UL中,每个车辆的服务AP对为其分配的无线电资源上发送的CSM执行协作接收。 在DL中,车辆仍可以由其自己的逻辑单元服务。 但是一种更有效的方式是合并位于附近的车辆的逻辑单元[47],并使用多播/广播来传播生成的LDM [38]。
我们在此指出,尽管我们的最初目的是支持对自动驾驶的协作感知,但不难看出,许多其他用例的通信需求(例如,信息娱乐类型应用程序中与后端服务器的通信)也可以基于已建立的系统架构上,只要UL / DL传输发挥作用即可。 但是,具体的访问策略应根据流量模式和通信要求进行调整。
Ⅳ.运动信息辅助用户中心式访问
在本节中,我们讨论如何在以用户为中心的访问策略设计中利用车辆的运动信息。 并讨论实际网络部署和约束带来的问题、和周期性CSM的UL传输。我们注意到,大多数基于基础设施的车辆通信中的工作,包括那些以用户为中心的访问[37],[38],都致力于DL。 据我们所知,专门针对UL的研究很少。
回想一下,我们需要高数据速率,低端到端延迟和高可靠性。对数据速率和可靠性的要求可以转换为对接收信号干扰加噪声比(SINR)的要求。 端到端等待时间,即车辆上CSM的生成与MEC服务器成功接收之间的时间差,由排队延迟,空中传输延迟,处理延迟和重传延迟组成[48]。 以上这些因素的限制都来自于我们需要降低E2E延迟
A.AP集团和联合接收
由于AP和车辆的位置可获得的,因此可以使用位置相关策略选择逻辑小区的服务AP。 例如,可以选择最接近车辆的一定数量的AP,或者距车辆一定距离内的AP。由于车辆和服务AP之间的传播距离短,如果存在LOS路径,则信道条件将很好。但是,由于在实际情况下LOS路径可能被诸如公共汽车和树木之类的障碍物阻塞,因此可能会出现严重的阴影衰落。 此外,当多个链接穿过相同的障碍物时,它们的阴影衰落在空间上是相关的[49]。 因此,重要的是从不同方向选择服务AP,而不是仅基于距离。
不同车辆的逻辑单元可以重叠,但为了避免干扰将为其分配有单独的时频资源。 在实践中,由于有限的处理能力和前传容量,可能会限制AP可以服务的最大用户数量。 另一方面,车辆在空间上分布不均。 例如,交叉路口处的车辆密度通常较高。 因此,AP关联策略必须考虑负载平衡。
CSM的UL传输要求高数据速率和高可靠性。 如果AP仅具有RF单元,则所有基带处理将在MEC服务器上执行。 在这种情况下,可以应用许多高级CoMP联合接收技术,例如最大比率合并(MRC)。如果AP具有基带处理能力,则服务AP可以独立完成接收。与MRC相比,实现分集的增益要低,但是对前传的负担要小得多。 因此,如果前传的容量有限,则后一种策略更适合。 前传容量限制是要考虑的重要问题,因为无线前传[50]对于UDN是一个极具吸引力的解决方案。
由于其较大的物理尺寸,很可能在车辆上安装天线阵列和多个RF链。 然后,可以形成多输入多输出(MIMO)系统,并且可以利用各种MIMO技术。 既可以实现复用增益又可以实现分集增益,从而可以提高数据速率和可靠性。 在[44]中,考虑到UDN中的高LOS传输概率,提出了一种基于地理位置的波束成形技术,这种情况下车辆也可以使用。 而且,也可以允许使用不同时频资源分配的多连接性[51],这将使访问设计更加灵活。
B.无线资源分配
时频资源被分成正交的资源块(RB并由车),辆共享。 由于CSM的传输是周期性的,因此需要半永久策略来确保低延迟。 而且,由于限制了由不同车辆产生的CSM的大小,因此可以将相同数量的资源分配给每个车辆。 为了方便讨论,我们假定资源被划分为可以在一个RB上交付CSM。
被分配了相同RB的车,他们的UL传输会相互干扰。 因此,RB分配策略的重要任务是干扰控制。由于传播距离短,因此可以根据车辆的相对位置来分配RB。 例如,遵循针对LTE-V2V提出的策略[6],可以定义RB重用距离,并且不允许位于重用距离内的每两个车辆在同一RB上传输。 显然,重用距离的选择也会影响接收到的SINR。
RB分配策略也应考虑延迟约束。具体来说,它确定排队延迟和空中传输延迟。CSM由自动车辆的车载感知系统以相同的速率生成,但时间随机。生成CSM后,将其存储在缓存中等待发送。分配RB的等待时间越短越好,以最大程度地减少排队延迟。但是,只能分配附近车辆不占用的那些RB来进行干扰控制。 因此,应使用最大排队延迟约束。 另一方面,有多种方法来划分时频资源[48]:可以使RB在时域变宽而在频域变窄,反之亦可,然而传输数据的总量是不变的。在前一种情况下,允许更多的车辆同时发送,并且可以减少排队延迟,但是会导致更大的空中延迟。 在后一种情况下,结果相反。但是它们对整体性能的影响可能有所不同,因此需要仔细评估。
如果数据包接收失败,则车辆可能需要使用其他RB重新发送CSM。为了确保低延迟和高可靠性,可以保留用于重传的专用资源池。但是这将降低总体频谱效率。 在这方面,应在仔细评估对初始传输和重传性能的影响后,才选择保留的RB。
除了时频资源,ACC还可能需要控制车辆的发射功率。考虑到AP密集部署并且车辆由多个AP服务的情况,只要AP的拓扑结构保持不变,根据目标接收的SINR水平固定车辆的发射功率就是可行的。然而,车辆的密度也随时间变化。在车辆密度低的几个小时内,例如在夜晚,为了节省能源,部分AP可以进入空闲/睡眠模式。 此时网络拓扑将发生变化,平均传输距离将更长。 因此,应该相应地调整发射功率以保持SINR电平。
C.移动性支持
由于ACC知道车辆的位置、前进方向、速度和加速度,因此它可以通过估计车辆的未来位置来主动更新服务AP。这个操作可能会删除逻辑单元的当前成员,并添加新的AP。此变更对车辆是透明的。并需要开发有效的算法。
由于车辆以不同的速度和方向移动,它们的相对位置会随着时间而变化。 因此,ACC需要跟踪和预测通过同一RB传输的车辆的位置。一旦发现两个同道车辆距离太近,就会向其中一个重新分配新的RB。在资源管理算法的设计中,要在效率和性能之间进行权衡。关于性能,要考虑许多因素,例如必须进行下一次调整之前的干扰水平和可持续持续时间。穷举法搜索可行的RB可以优化性能,但是要付出高计算复杂度和低时间效率的代价。 或者可以通过降低性能来提高效率。
应该注意的是,整个地区将分为许多区域,每个区域都由LAAC管理。 当车辆在两个相邻区域内机动时,访问管理任务也将以主动方式从当前LAAC移交给目标区域之一。LAAC之间的接口将在此系统中扮演非常重要的角色。 通过该接口,应经常交换位于边界附近的车辆的运动状态和进入组织的信息。这些信息不仅是切换过程所必需的,也是分布式访问管理算法所必需的。
Ⅴ.数字基准
本节中,我们将通过仿真评估在简单场景中支持CSM的周期UL传输的建议体系结构的性能。 目的是检查以用户为中心的超密集网络是否可以容纳UL流量,以及是否可以满足延迟和可靠性要求。 因此,没有给出与服务AP更新和RB重新分配有关的与用户移动性相关的问题的策略,这些策略有待进一步研究。 我们没有尝试找到最佳的方法,而是在模拟中采用了实用的访问策略来为将来的工作提供基准。
A.场景模型和访问策略
考虑了Anurban高速公路场景和anurban交叉场景,其二维模型如图3所示。
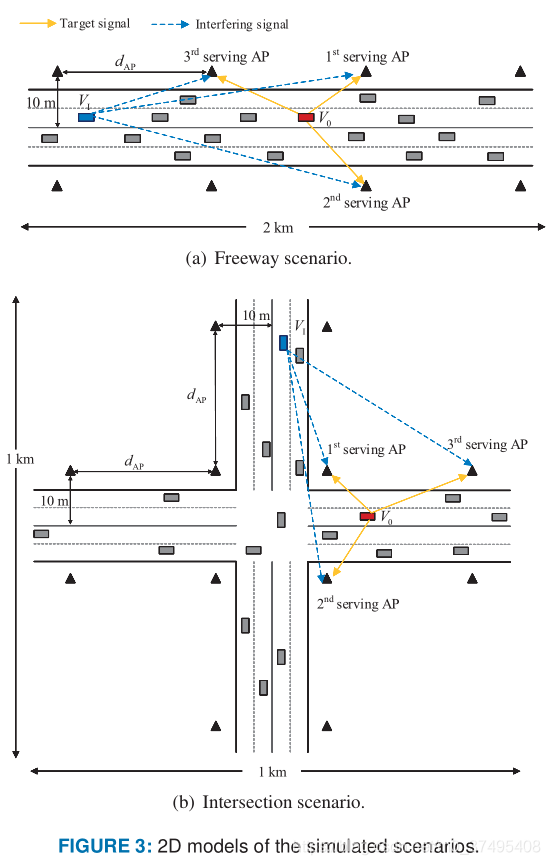
在高速公路场景中,路段长2公里,而在交叉路口场景中,两个垂直的路段长1公里,在它们的中点相交。所有道路的两侧各有一条3.5米宽的双车道。车辆沿着每个车道的中心线分布。它们的位置遵循一维齐次泊松点过程(PPP)。车辆之间的平均距离以给出(单位为米)。相应的,每条道路上的车辆密度为每公里
辆。 AP在道路两侧对称且均匀分布,两个相邻AP之间的距离以
(单位为米)表示。在AP和车辆上均假定使用单个天线,并且天线高度分别由
和
表示,以米为单位。 在模拟中,道路的两端延长了1 km,但是位于延伸部分的车辆在性能评估中并未考虑在内。
假定高速公路上的所有车辆都是自动车辆,它们会定期生成CSM,并希望将其发送到UL中的MEC服务器。 消息速率固定为,有效载荷大小由6000字节给出。 遵循均匀分布,在消息周期
中随机选择车辆生成CSM的时间实例。分配了中心频率
时B = 20 MHz的专用带宽。 即,没有来自其他业务的干扰。RB被设置为在频域中占据整个带宽,在时域中占据1 ms。因此,将T×B时频资源总共划分为100个RB,由
表示,以由所有车辆共享。 要在1ms内发送6000字节的CSM,需要有效载荷传输速率为48 Mbps。 我们将接收器的SINR阈值
设置为12 dB,基于此阈值,在20 MHz带宽上的Shannon信道容量约为81.5 Mbps。 当收到的SINR达到此阈值时,CSM被视为可靠接收。
考虑一个自动车辆,并用
~ uni(0, T]表示其CSM生成时刻,根据距
的二维距离选择K个服务AP,考虑AP分布的对称性和可能的空间 阴影衰落的相关性,使用以下策略。第一个候选者是最接近
的AP(位于
位于道路的同一侧); 第二个候选对象是相对的那个,最接近
; 第三个候选者位于同一侧,第二个最接近
;等等。

RB分配策略同时考虑了排队延迟控制和干扰控制。 定义了最大排队延迟L(以毫秒为单位)和RB重用距离D(以米为单位)。要求在生成CSM之后,必须在限制内为车辆分配RB,同时,RB不能被相对距离小于
的任何两辆车辆重用。为了简单起见,忽略了车道的宽度,在交叉路口场景中,当两辆车分别位于两条垂直道路上时,它们到相交点的距离之和即为两辆车之间的距离之和,如图4所示。特别地,
的RB分配过程总结如下:

如果将标记为拥塞,则将不会传输其生成的CSM。 否则,其K个服务AP将尝试独立接收发送的CSM。 由此实现了宏分集增益。 因此,有效接收的SINR由下式给出:
(1)
其中SINR k表示在第k个服务AP处接收到的SINR。 如果SINR eff低于τ,则认为CSM数据包丢失。 不允许重传。 因此,端到端传输延迟由L + 1 ms限制。
用表示被分配了与V 0相同的RB的那组车辆,SINR k计算为:
(2)
其中P k,0 RX和P k,l RX分别表示来自V 0的目标信号功率和来自V 0的干扰信号功率。 N 0是功率谱密度为-174 dBm / Hz的加性高斯白噪声(AWGN)的功率。 每个车辆的发射功率固定为P TX = 10 dBm。 接收信号功率的计算方式如下(为清楚起见,省略了上标):
(in dBm) (3)
其中PL,X和δ表示路径损耗,大规模阴影衰落 和小规模多径衰落。
表2中显示了3GPP为小型BS场景[52]定义的3D-UMi路径损耗模型,其中d 2D和d 3D分别代表AP和车辆之间的2D和3D(计数高度)距离,以及为对数正态阴影衰落X的标准偏差。该模型区分了LOS和非视距(NLOS)传输情况,LOS概率由下式给出:
(4)
(4)根据(4),当≤18 m时,LOS概率为1。多径衰落δ遵循瑞利分布。
由于合作感知的性能取决于所有车辆而不是单个车辆的CSM接收可靠性水平,因此将从整个系统的角度评估性能。 定义了三个性能指标:
-
拥塞率(CR),用
表示,是指路段上所有车辆中拥塞车辆的比率,即在排队延迟限制内未分配RB的那些车辆。
-
由P PLR表示的分组丢失率(PLR)被定义为在分配了RB的所有车辆中丢失了CSM的车辆的比率,即,其有效接收的SINR未达到
的车辆的比率。
-
中断概率,用
表示,并计算为
表示CSM的概率 在E2E延迟限制之内,网络中任何车辆产生的故障都无法转移到MEC服务器。
显然,降低CR和PLR以获得高整体可靠性很重要。
B.仿真结果
1)L和D的影响
首先,在两种情况下,我们分别设置 = 30 m,
= 10 m和
= 1.5 m。从{75 m,100m,125m}选择RB重用距离D,从{4ms,6 ms,8 ms}选择排队延迟极限L。 分别在图5,图6和图7中相对于平均车距d VEH绘制了平均CR,PLR和停电概率,该平均车距d VEH在10 m至50 m之间变化。 假设所有车辆的长度均为5 m,则对应于2秒安全距离的平均间隔在9km/h到81km/h之间,这代表了堵车和通常的交通场景。注意,车辆密度与d VEH成反比。 在最多
个系统实现中,对结果进行平均。 在每种实现中,从路段上的每辆车发送20个CSM,其位置不会更改,但会为每个CSM生成独立的通道实现。 在本节的所有图中,D = 75 m的结果以红色绘制,D = 100 m的蓝色绘制,D = 125 m的绿色绘制。

从图5可以清楚地看出,CR由排队延迟极限L和车辆密度共同决定。 L的减小和的减小(车辆密度的增加)都会降低CR。 当
和L固定时,可以通过选择较小的D来降低CR。由于交叉路口情景中竞争车辆的数量较大,因此与高速公路情景相比,在相同
和L设置下会产生较高的CR。
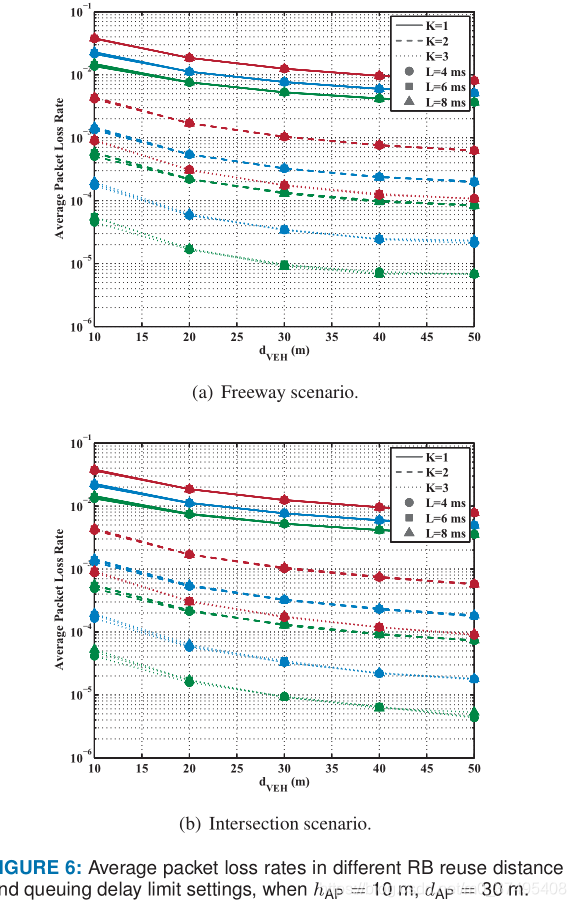
图6显示,PLR也随着车辆密度的增加而增长,但是与CR相比要慢得多。 L的变化对PLR几乎没有影响,因为在所有设置中拥挤车辆的百分比都足够小。 但是,可以通过增加D来降低PLR,以使同频道干扰源分离得更远,或者通过增加K以获得更高的分集增益。 与干扰源之间的差异相比,在两种不同情况下实现的PLR之间的差异要小得多,因为干扰源之间的间隔有效。
由于D的变化对CR和PLR具有相反的影响,因此在选择D时存在折衷。从图7可以看出,对于不同的L,使用不同的D选择获得的中断概率曲线的关系是不同的。 因此,应在不同的用户密度,通信要求和方案下仔细优化D。 当 = 50 m,L = 8ms,D = 125 m和K = 3时,在高速公路情景中的停机概率达到10 -5。但是,当车辆密度很大时(
= 10 m) ,由于CR较大,很难将中断概率降低到10 -2以下。 为了改善中断性能,可以通过选择较小的D来减小CR,然后增加K来弥补PLR带来的降级。 但是,应注意的是,RB的短缺是基本约束,同时,更大的K值意味着对前传链路的容量和AP处理能力更大的要求。
2)AP部署的影响
接下来,在高速公路场景中,在不同的AP部署下评估性能,其中L固定为8 ms,D从{75 m,100 m,125m}中选择。 在交叉路口场景中,预计会有类似的影响。 考虑三种设置:1) = 3 m,
= 30 m,2)
= 10 m,
= 10 m,以及3)
= 3 m,
= 10 m。 由于AP部署与所采用的RB分配策略无关,因此CR性能保持与图5(a)所示的性能相同(用三角形标记)。 图8和图9分别绘制了平均PLR和中断概率。
通过比较图8和图6,可以清楚地看到,通过减小h AP或缩小可以减少PLR。通过减少
,缩短了车辆与服务AP之间的3D距离。 因此,减少了路径损耗并且改善了接收到的SINR。
的缩小还有助于减小传输距离并改善信道状况。 更重要的是,它增加了LOS传输的可能性。 结果,当将
设置为较小的值时,对于任何K,通过降低
所带来的PLR性能的提高都明显更大。最终,将图9与图7进行比较,可以看出 在更多设置中可以达到10 -5停机概率目标。


为了提供有关可靠性性能的更多详细信息,在图10中绘制了在高速公路情景下所有系统实现中获得的的累积分布函数(CDF),其中L = 8 ms,
= 50 m。 设置。 研究有效接收到的SINR是因为通常对链路级传输可靠性更感兴趣。 表3给出了一些重要的统计数据。对于大多数传输,实现的有效SINR足够高。 当我们查看尾部分布时,可以看出,在所有设置中,
≤12 dB的概率都被限制在10 -5以下,而实际值非常接近平均PLR。 这是可以理解的,因为如果在一个系统中实现的PLR很大,则平均PLR将会大大提高。 有趣的是,当(
,
,D,K)由(3, 10, 125, 2)给出时,
是在这之中最大的值但方差也是最大的。这是因为一个更大的K(在其他三个设置中K=3)可以有效地帮助减少多样性增益带来的方差。

仍然需要强调的是,此处采用的性能指标可能并非最适合协作感知应用程序。 当车辆密度增加时,由于将消息速率设置为固定,所以每单位面积和时间生成的CSM数量也变大,但是CSM中包含的信息变得更加冗余。 此外,较大的车辆密度通常意味着平均速度较低,即环境的动态性较差。 因此,在不降低协作感知性能的情况下降低消息速率是可行的。 在ETSI ITS-G5中,这可以通过分散式拥塞控制(DCC)功能解决。 同样,定义性能指标以使其更适合应用程序也是至关重要的,将来还需要做更多的工作。
Ⅵ.结束语
在这篇文章中,提出了一个以运动信息辅助的用户中心式超密集车载网络架构,用以支持自动驾驶场景下的协同感知,特别是,网络功能是分布式的LAAC托管在MEC服务器上,既充当应用程序中心,又充当以用户为中心的访问控制中心。本文重点讨论了周期性CSM的UL传输,讨论了运动信息辅助以用户为中心的访问策略的可能设计,这些策略涵盖AP关联,联合接收,无线电资源分配和移动性支持。 还提出了一种实用的基准测试策略集,并通过简单场景下的计算机仿真对其进行了评估。 结果表明,可以同时满足对可支持的车辆密度,数据速率,可靠性和等待时间的要求,但需要谨慎选择关键参数。
但是,就建议的基准测试策略而言,还需要做更多的工作。AP关联策略和RB分配策略的参数应在不同的系统部署和实际约束下进行优化。 为此,有必要对性能指标进行分析评估。根据第四部分的讨论,需要开发实用的算法,并在现实的假设和约束下,并考虑车辆的实际时空分布,在不同场景下评估其性能。特别地,应包括车辆的机动性模型,并且需要用于在车辆运动之后进行动态时空-频率资源管理的算法。如上一节末尾所述,定义更适合应用程序需求的性能指标也很重要。 最后,研究运动状态中的错误对系统性能的影响至关重要。
