前言
- 本文的所有操作已经实践过的,只要每一步照做,一定会跑通的。
(1)添加一个系统调用,实现对指定进程的nice值的修改或读取功能,并返回系统最新的nice值即优先级prio。
建议调用原型为:
int mysetnice(pid_t pid, int flag, int nicevalue,void_user*prio,void_user*nice)
参数含义:
- pid:进程ID
- flag:若值为0,表示读取nice值;若值为1表示修改nice值。
- prio,nice:指向进程当前优先级及nice值。
- 返回值:系统调用成功时返回0,失败时返回错误码EFAULT。
(2)写一个简单的应用程序测试(3)添加的系统调用
添加系统调用
添加系统调用的主要步骤为:
- 修改系统调用表
- 申明系统调用服务例程原型
- 实现系统调用服务例程
修改系统调用表
以root用户在linux-4.16 目录下工作:
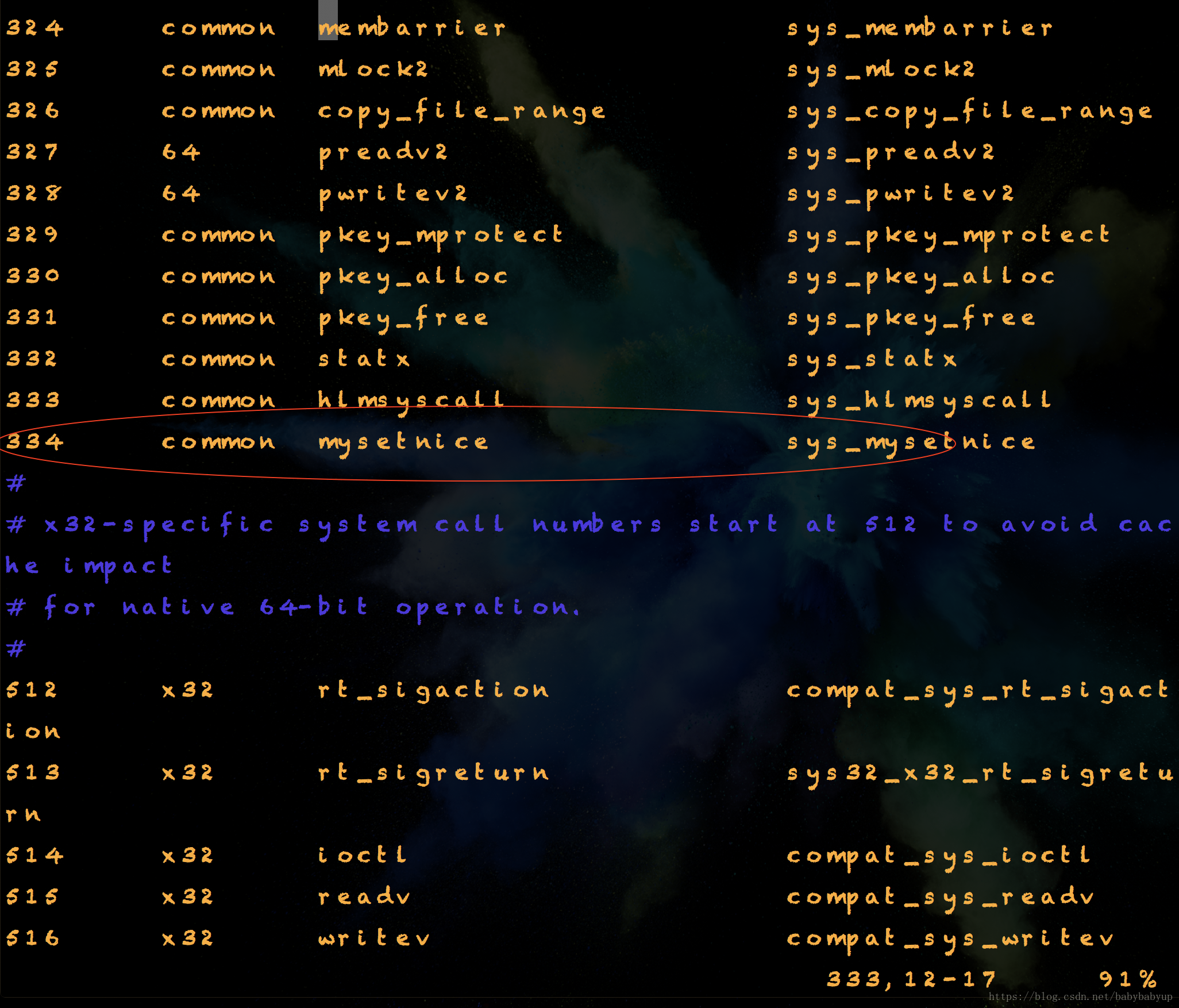
vim arch/x86/entry/syscalls/syscall_64.tbl添加系统调用号334 的系统调用,系统调用名为mysetnice,服务例程入口为sys_mysetnice
申明系统调用服务例程原型
执行命令
vim include/linux/syscalls.h 添加
asmlinkage long sys_mysetnice(pid_t pid,int flag,int nicevalue,void __user*prio,void __user*nice);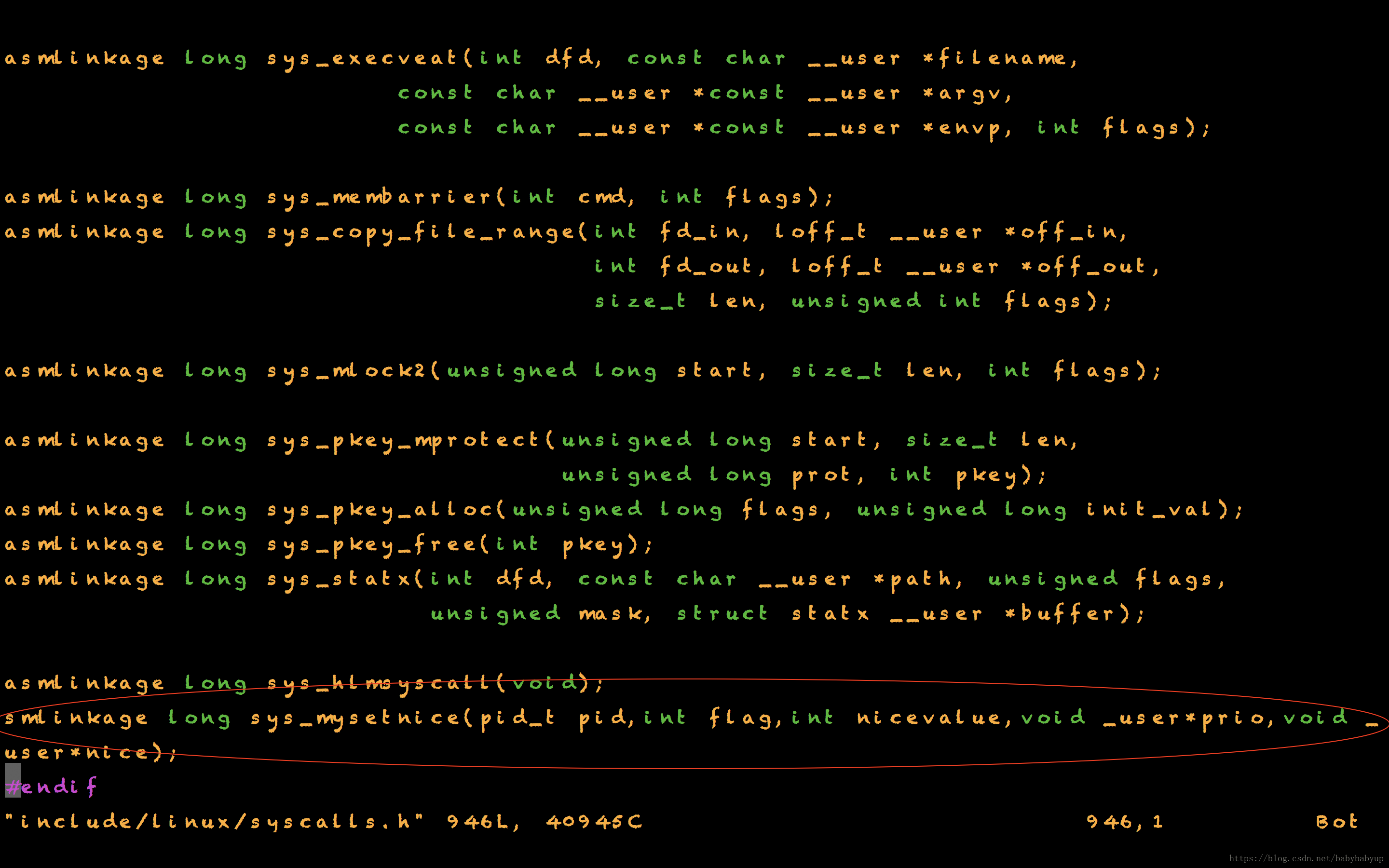
实现系统调用服务例程
执行命令:
vim kernel/sys.c 添加
SYSCALL_DEFINE5(mysetnice,pid_t,pid,int,flag,int,nicevalue,void __user*,prio,void __user*,nice){
struct pid * kpid;
struct task_struct * task;
kpid = find_get_pid(pid);/* 返回pid */
task = pid_task(kpid, PIDTYPE_PID);/* 返回task_struct */
int n;
n = task_nice(task);/* 返回进程当前nice值 */
int p;
p = task_prio(task);
if(flag == 1)
{
set_user_nice(task, nicevalue);/* 修改进程nice值 */
/* printk("修改后的nice值:%d\n", nicevalue);*/
n = task_nice(task);
copy_to_user(nice,&n,sizeof(n));
copy_to_user(prio,&p,sizeof(p));
return 0;
}
else if(flag == 0)
{
/* printk("该进程的nice值为%d\n", n);
printk("进程优先级: %d\n", p);*/
copy_to_user(nice,&n,sizeof(n));
copy_to_user(prio,&p,sizeof(p));
return 0;
}
return EFAULT;
}
解释一下:注释掉的是输出到内核,不注释掉可以通过dmesg 查看。

编译内核
这个已经在之前的博文中写到了,可以查看
https://blog.csdn.net/babybabyup/article/details/79720082
慢慢等编译完成
编写测试函数
服务例程:
SYSCALL_DEFINE5(mysetnice,pid_t,pid,int,flag,int,nicevalue,void __user*,prio,void __user*,nice),系统调用号为334。在传参数的时候要格外注意。具体思路:手动设定pid(用ps命令查看),flag,nice,然后输出最新的prio以及nice。
- 具体函数:
#define _GNU_SOURCE
#include <unistd.h>
#include<sys/syscall.h>
#include<stdio.h>
#include<stdlib.h>
int main(){
pid_t pid;
int nicevalue;
int flag;
int p = 0;
int n = 0;
int *prio;
int *nice;
prio = &p;
nice = &n;
/*
* 获取pid
* */
printf("请输入pid:\n");
scanf("%d",&pid);
/*
* 获取nice;
* */
printf("pid赋值成功\n请输入nice:\n");
scanf("%d",&nicevalue);
/*
* 获取flag;
* */
printf("nice赋值成功\n请输入flag:\n");
scanf("%d",&flag);
/*
* 调用添加的系统调用;
* */
syscall(334,pid,flag,nicevalue,prio,nice);
/*
* 输出最新的prio以及nice;
* */
printf("现在的nice为%d\n,prio为%d\n",n,p);
return 0;
}nice的取值范围为-20~19
运行截图
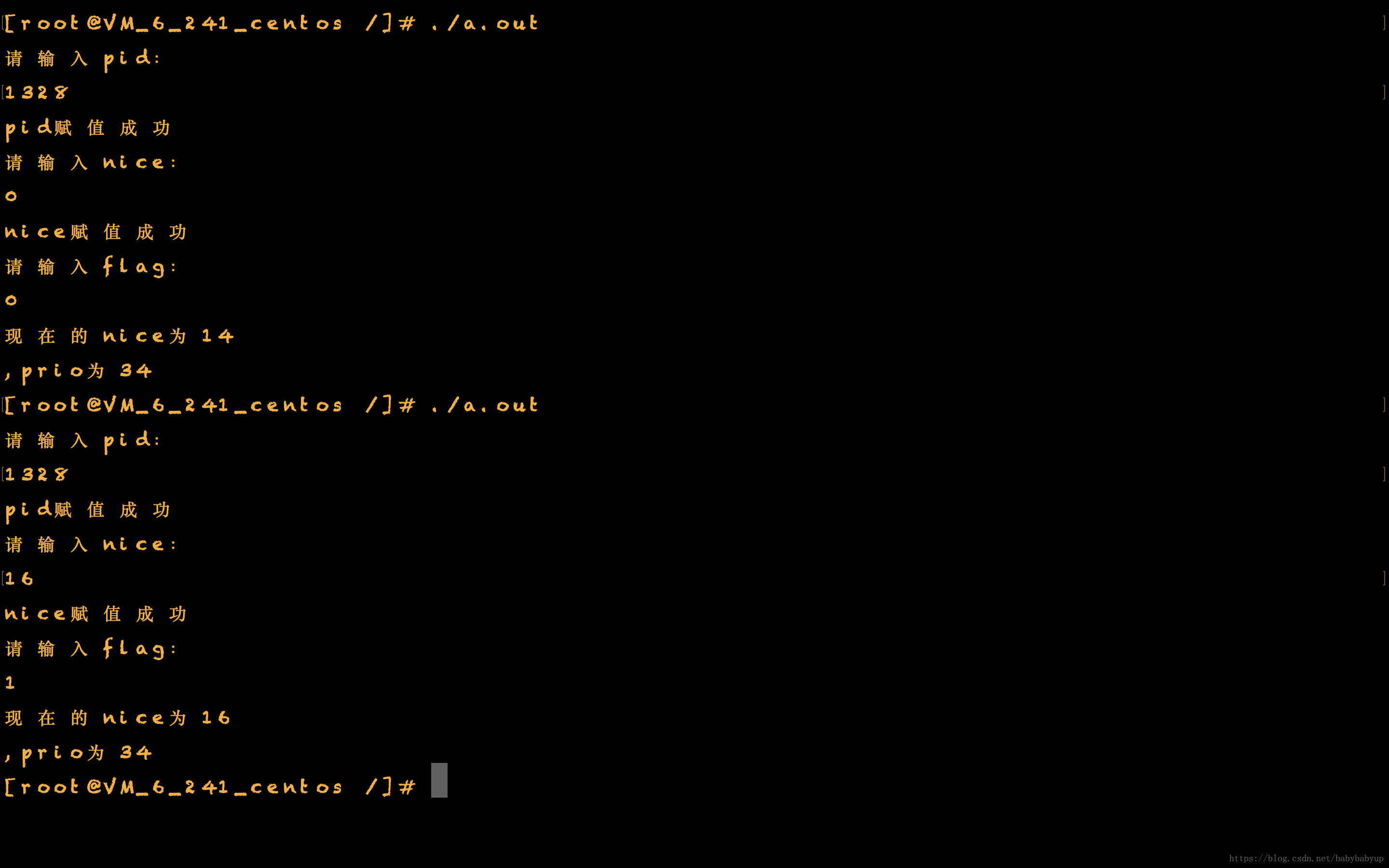
再次查看修改后的

今天看了整个下午的源代码,但是现在还是两眼一抹黑。。。验收的时候还神奇的过了。。部分源代码可以参考一下
https://blog.csdn.net/babybabyup/article/details/80102576
找源代码找的好辛苦。。。