Introduction
(1)IVPR问题:
根据一张图片从视频中识别出行人的方法称为 image to video person re-id(IVPR)
应用:
① 通过嫌犯照片,从视频中识别出嫌犯;
② 通过照片,寻找走失人口.
(2)图片-视频行人匹配问题的描述:
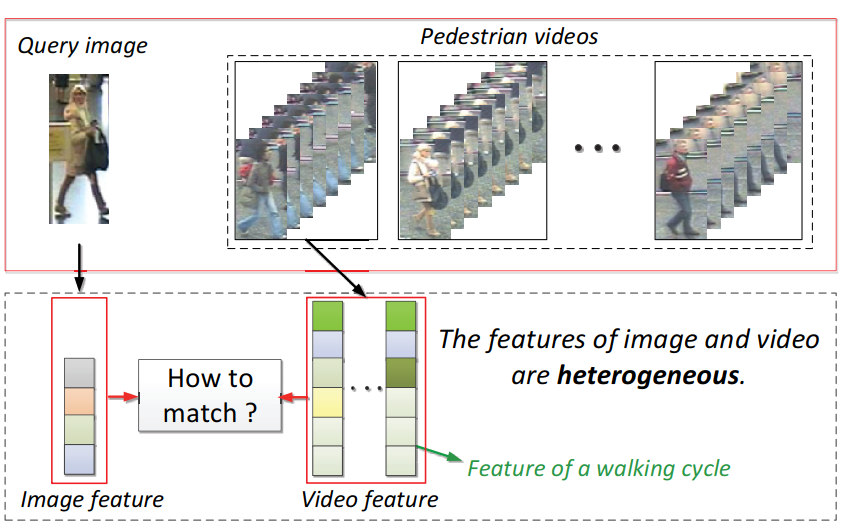
(3)IVPR的难点:
① 图像、视频的特征不同:视频包含视觉外貌特征(visual appearance features)和时空特征(spatial-temporal features),而图片只包含视觉外貌特征;
② IVPR是一个点到集合的匹配问题(point-to-set),每一段视频的不同帧或者步行周期都有较大的变化.
(4)Motivation:
现存的行人重识别方法需要两个对象提供同类的特征,然而在IVPR问题中,只有视觉外貌特征能够从两个对象中提取出,而时空特征只能在视频提取,因此无法应用到现存的方法中. 在视频行人重识别中,时空特征和视觉外貌特征是互补的,不可或缺,仅仅使用视觉外貌特征会限制识别性能. 并且现有的算法并不适用于点到集合的匹配问题.
(5)Contribution:
① 首次对图像-视频匹配问题进行研究.
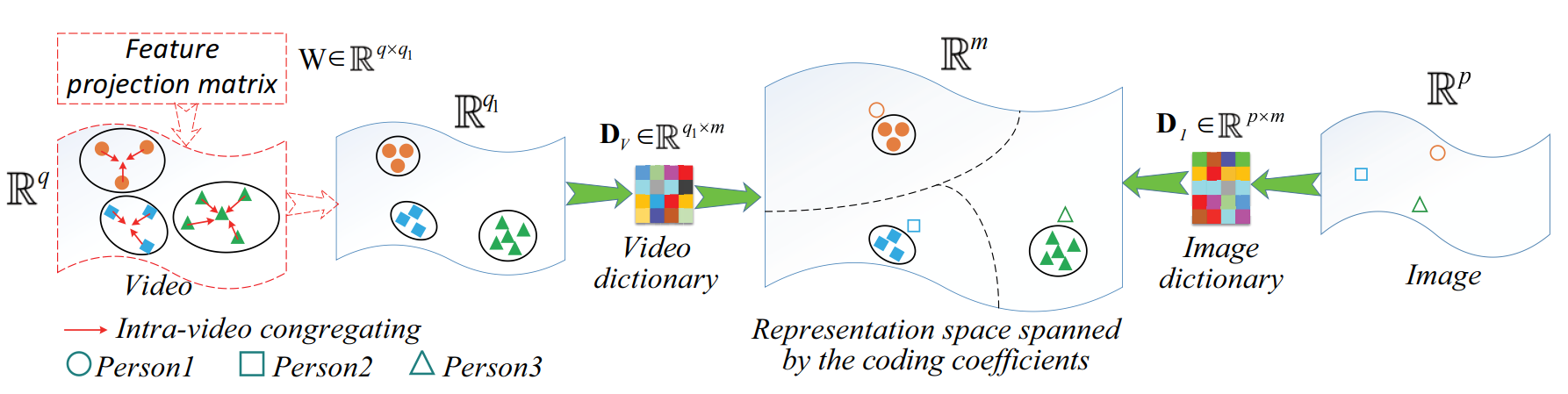
② 提出了一个联合特征投影矩阵和异构字典对学习方法(PHDL),特征投影矩阵(joint feature projection matrix)使得同一个视频之间的变化降低,异构字典对(heterogeneous dictionary pair)使得异构的图片和视频的特征转换成相同维度的编码;设计了一个点到集合的系数区分度项,确保特征编码有较好的区分度.
③ 设计了一个视频聚集项,来降低视频内部的变化,提高视频的紧凑型.
The Proposed Approach
(1)问题定义:
① 参数及变量定义:
X = {x1, ..., xi, ..., xn}:训练图像特征集,xi 表示第 i 个行人图片,规格为 p 维(其中 n 为行人数量);
Y = {Y1, ..., Yi, ..., Yn}:训练视频特征集,Yi = {yi,1, ..., yi,j, ..., yi,ni} 表示第 i 个行人视频,yi,j 表示第 i 个视频的第 j 个步态周期提取的特征,规格为 q 维(其中 ni 为第 i 个行人的步态周期数);
W:学习得到的特征压缩矩阵(feature projection matrix FPM),规格为 q*q1(其中q1为压缩后的特征维度);
DI:学习得到的图片字典,规格为 p*m(其中 m 为原子数量);
DV:学习得到的视频字典,规格为 q1*m;
A = {a1, ..., ai, ..., an}:X 通过 DI 得到的编码系数矩阵(coding coefficient matrix);
B = {B1, ..., Bi, ..., Bn}:Y 通过 DV 得到的编码系数矩阵,其中 Bi = {bi,1, ..., bi,j, ... bi,ni}.
② PHDL方法介绍:
③ 问题定义:
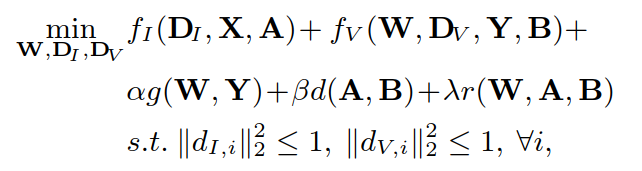
其中的参数和函数:
α、β、γ 是平衡因子(balancing factor),
dI,i、dV,i 是 DI、DV 的第 i 个原子.
![]() :图片重构保真度项(image reconstruction fidelity term),个人理解:衡量原始数据集和字典矩阵编码后的差异,尽量要缩小两者间的差距,使得编码结果与原始数据更贴近.
:图片重构保真度项(image reconstruction fidelity term),个人理解:衡量原始数据集和字典矩阵编码后的差异,尽量要缩小两者间的差距,使得编码结果与原始数据更贴近.
![]() :视频重构保真项(video reconstruction fidelity term).
:视频重构保真项(video reconstruction fidelity term).
![]() :视频聚合项(video congregating term),理解为所有视频的每个特征与特征均值 m 的距离.
:视频聚合项(video congregating term),理解为所有视频的每个特征与特征均值 m 的距离.
 :点到集合编码差异项(point-to-set coefficient discriminant term),对于匹配成功的 image-video pair 距离更短,对于匹配失败的 image-video pair 距离更长,其中
:点到集合编码差异项(point-to-set coefficient discriminant term),对于匹配成功的 image-video pair 距离更短,对于匹配失败的 image-video pair 距离更长,其中![]() ,S 为匹配成功的集合,Q 为匹配失败的集合,η 为平衡因子.
,S 为匹配成功的集合,Q 为匹配失败的集合,η 为平衡因子.
![]() :正则化项(regularization term),个人的理解是正则化项通常用于防止过拟合.
:正则化项(regularization term),个人的理解是正则化项通常用于防止过拟合.
(2)优化算法:
将目标函数分为三个子问题:编码系数更新(A、B更新)、字典矩阵更新(DI、DV更新)、特征投影矩阵更新(W更新).
① 初始化 W、DI、DV、A、B:
首先通过下式的优化,初始化W:

(文中说用特征分解的方法,如何实现?)
再用随机矩阵的方法对字典矩阵进行初始化;
最后对A、B的初始化可以视为岭回归(ridge regression)问题:
![]()
![]()
分析得出:
![]()
![]()
(岭归回问题待学习,上述结论待推导)
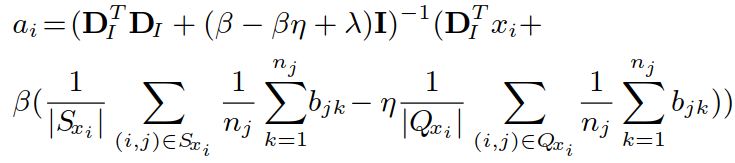
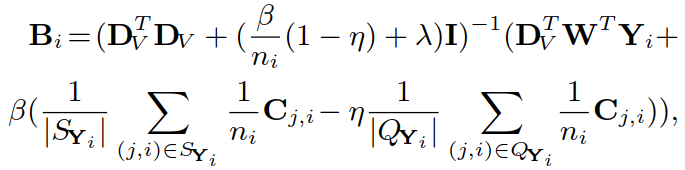
② W、DI、DV确定,更新A、B:

采用求导的方式得到结果(其中 Cj,i 的每一列是 aj):
推导过程如下( Bi 类似)

③ 确定 A、B、W,更新 DI 和 DV:
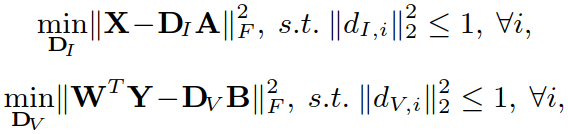
引入变量 S (其中 si 表示 S 中的第 i 个原子):

使用ADMM算法对求解 DI 进行优化(求解 DV 类似):

(ADMM算法待学习)
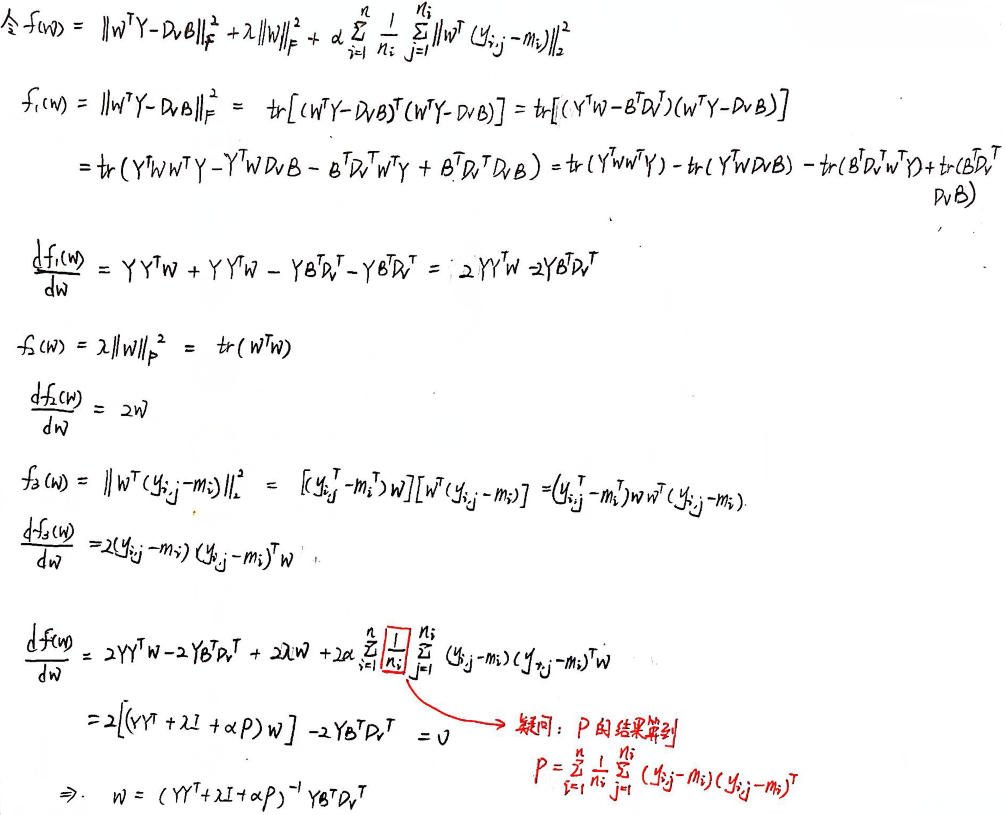
④ 确定 DI、DV、A、B,更新 W:
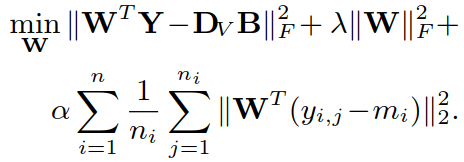
通过求导得出解:![]()
其中 ![]() (但我算到的结果不一致)
(但我算到的结果不一致)
推导过程:
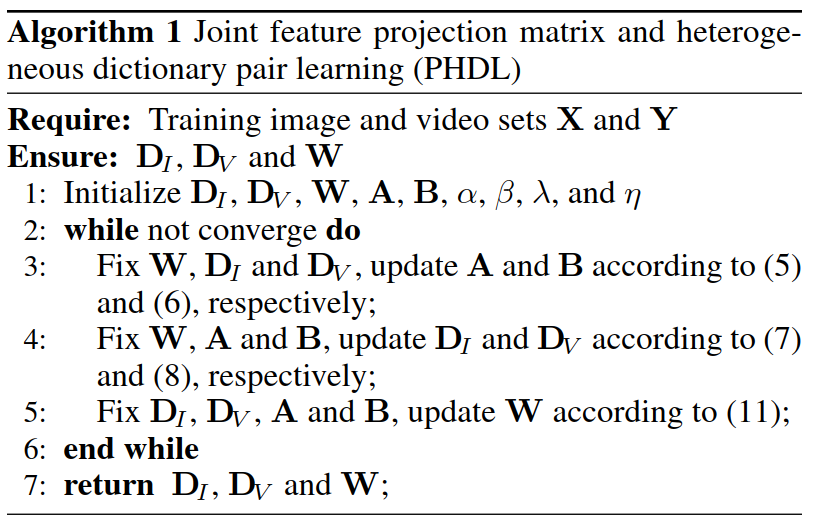
⑤ 优化算法流程:
(3)结果预测:
待测图片:x
视频库:Z = [Z1, ..., Zi, ...,Zl],其中 Zi = [zi,1, ..., zi,j, ..., zi,ni] 表示第 i 个视频的特征集.
行人重识别过程:
① 将图片 x 通过 DI 转为编码a;
② 将视频集 Z 通过 DV 编码 G;
③ 计算两者间的距离:![]() ,对结果进行排序.
,对结果进行排序.
Experimental Results
(1)数据集:
① iLIDS-VID数据集:
该数据集含有300个行人的600个图像序列,每个行人都有来自两个相机拍摄的图像序列.
每个图像序列含有22-192帧,平均还有71帧.
② PRID2011数据集:
Cam-A含有385个行人的图像序列,Cam-B含有749个行人的图像序列.
每个序列含有5-675帧,平均含有84帧(低于20帧的需要被忽略).
(2)实验设置:
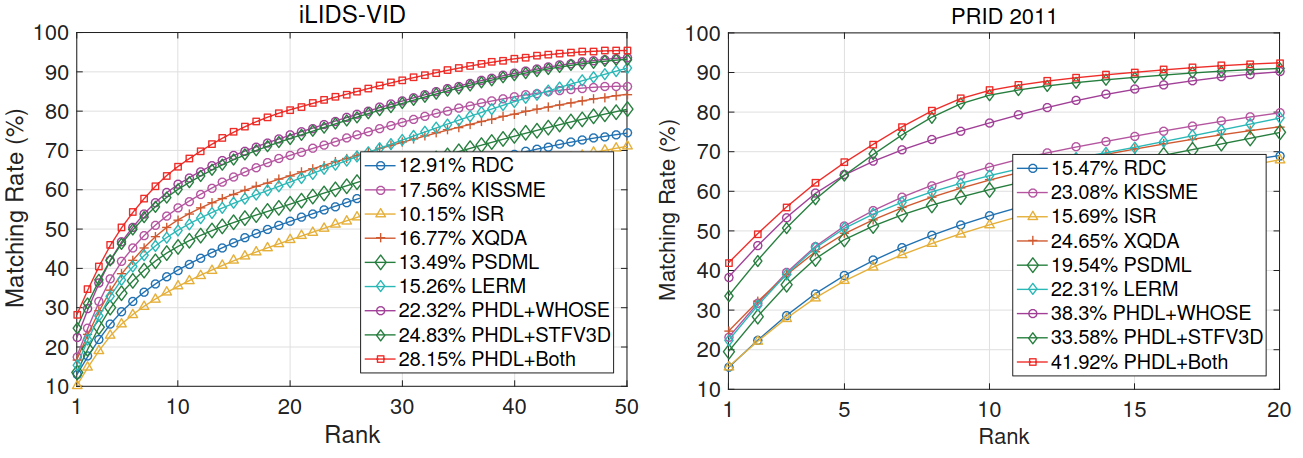
① 对比方法:RDC、KISSME、ISR、XQDA、PSDML、LERM.
② 特征选取:WHOSE、STFV3D.
③ 评估设置:从一个相机的视频序列中随机挑选一帧作为待测图片,从另一个相机的视频中进行识别. 数据集的50%作为训练集,50%作为测试集.
④ 参数设置:对于iLIDS-VID数据集:α = 10, β = 0.8, λ = 0.012, η = 0.12,字典规格120,W的列数460;对于 PRID2011数据集:α = 12, β = 0.7, λ = 0.01, η = 0.14,字典规格180,W的列数380.
(3)实验结果:
Discussion
(1)特征压缩矩阵的效果:
若没有使用特征压缩矩阵 W ,记为 PHDL-W:

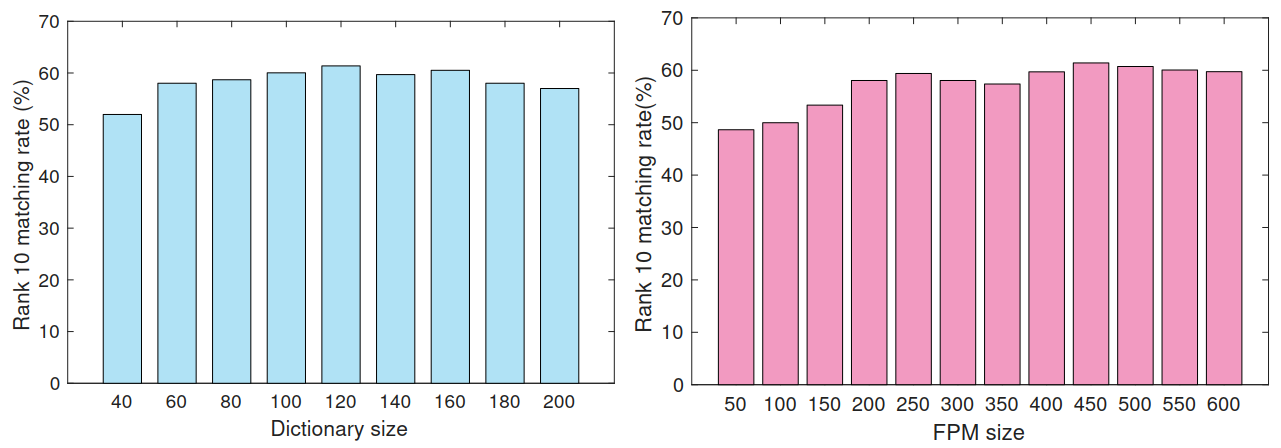
(2)字典规格和特征压缩矩阵规格的选择:
根据在iLIDS-VID数据集上的实验结果,最终选定字典大小为120,FPM大小为[400, 600]之间.(PRID2011数据集类似)
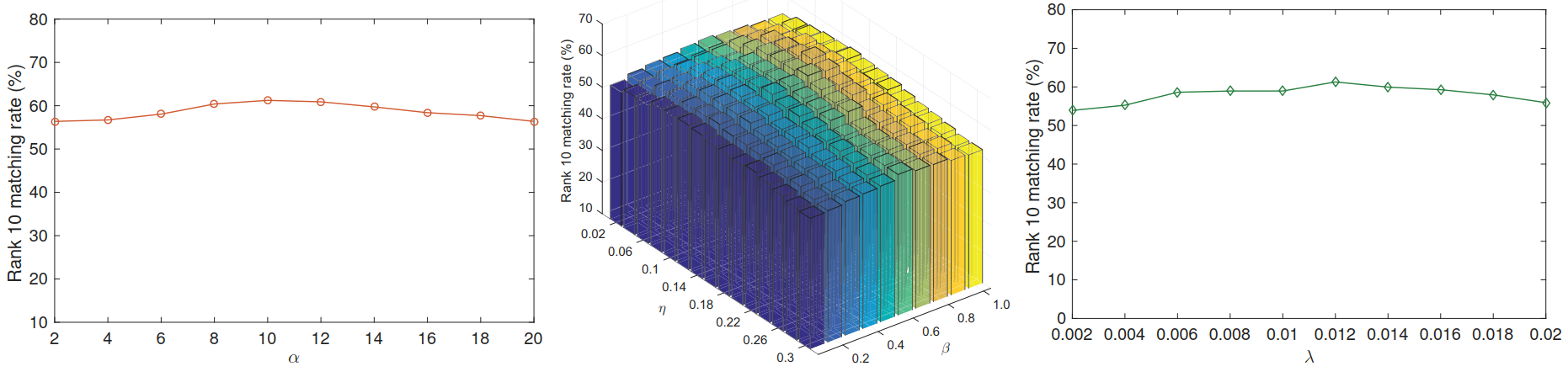
(3)参数的选择:
根据在iLIDS-VID数据集上的实验结果,α 选择[6, 16]之间,β 和 η 选择0.8和0.12,λ 选择[0.006, 0.016]之间.(PRID2011数据集类似)
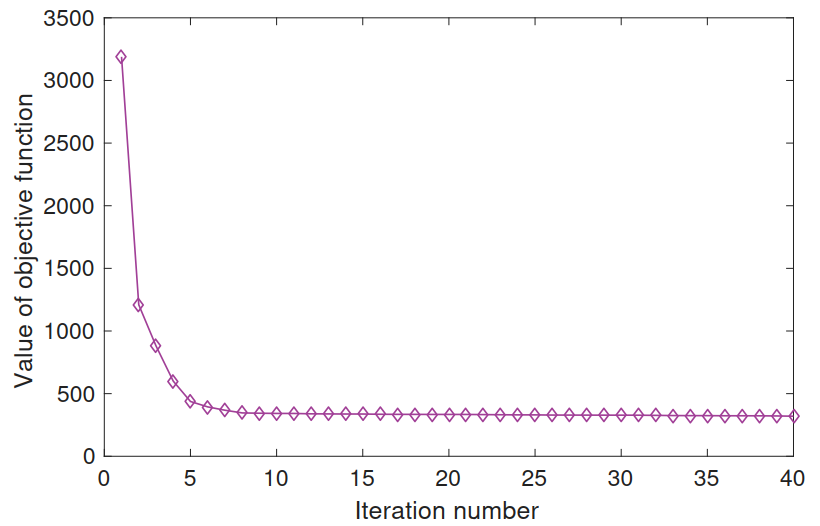
(4)迭代次数的选择:
在实验中,迭代15次基本趋于水平.