Unity 使用物理射线(Physics.Raycast),实现扇形(Fan-Shaped)区域碰撞检测。
参考之前的制作简单AI: Unity 有限状态机(Finite State Machine)的理解 与 实现简单的可插拔(Pluggable)AI脚本对象。
源码:GentleTank/PluggableAI/Scripts/Decision/LookDecision.cs
方法一:
实现原理:(lookAngle / 2) / lookAccurte
很简单,就是射多几条角度平均的射线。可以设置角度,精度(射线数量),来调节扇形区域的检测。每条射线夹角是总夹角处于2,再除于精度。
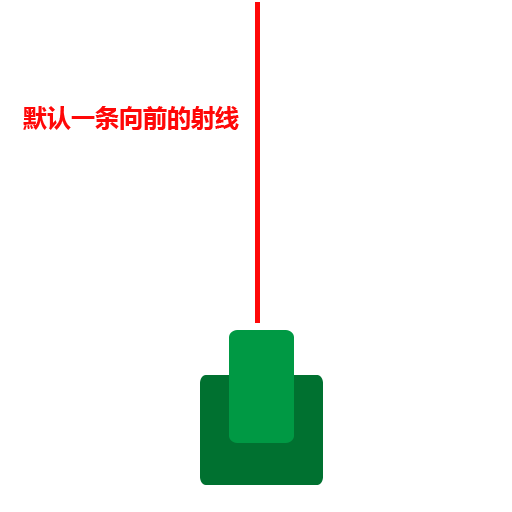
1. 默认是射出一条向前的射线,精度为0。
2. 设置角度为90,精度为1,就会多出两条相对正前方45度的射线。

3.设置精度为2。

实现代码
//
// LookDecision
//
//放射线检测
private bool Look(StateController controller)
{
var defaultStats = controller.defaultStats;
//一条向前的射线
if (LookAround(controller, Quaternion.identity, Color.green))
return true;
//多一个精确度就多两条对称的射线,每条射线夹角是总角度除与精度
float subAngle = (defaultStats.lookAngle / 2) / defaultStats.lookAccurate;
for (int i = 0; i < defaultStats.lookAccurate; i++)
{
if (LookAround(controller, Quaternion.Euler(0, -1 * subAngle * (i + 1), 0), Color.green)
|| LookAround(controller, Quaternion.Euler(0, subAngle * (i + 1), 0), Color.green))
return true;
}
return false;
}
//射出射线检测是否有Player
static public bool LookAround(StateController controller, Quaternion eulerAnger,Color DebugColor)
{
Debug.DrawRay(controller.eyes.position, eulerAnger * controller.eyes.forward.normalized * controller.defaultStats.lookRange, DebugColor);
RaycastHit hit;
if (Physics.Raycast(controller.eyes.position, eulerAnger * controller.eyes.forward, out hit, controller.defaultStats.lookRange) && hit.collider.CompareTag("Player"))
{
controller.chaseTarget = hit.transform;
return true;
}
return false;
}
最终效果
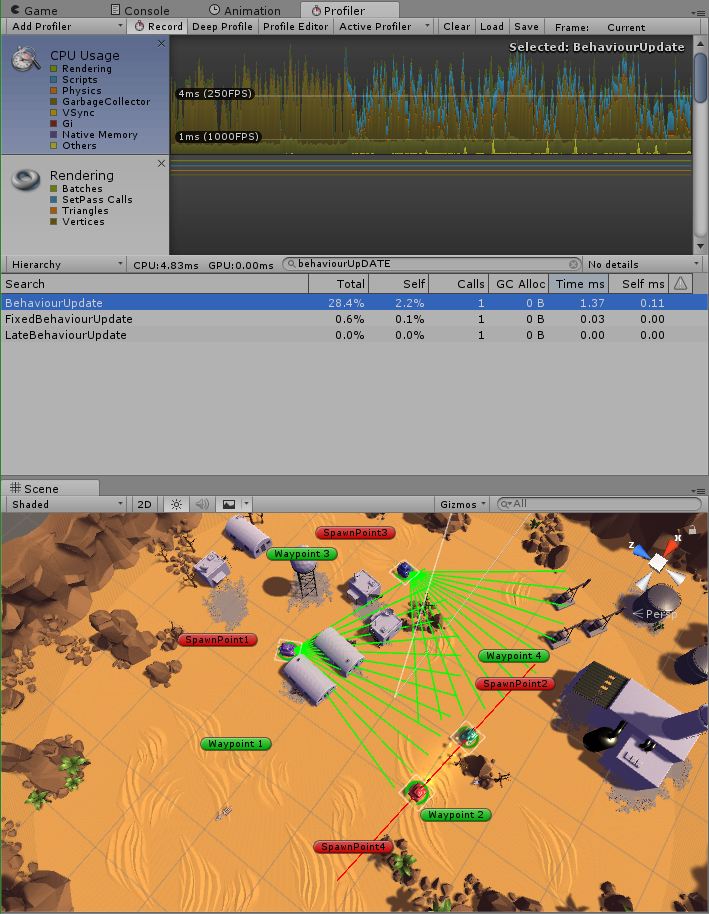
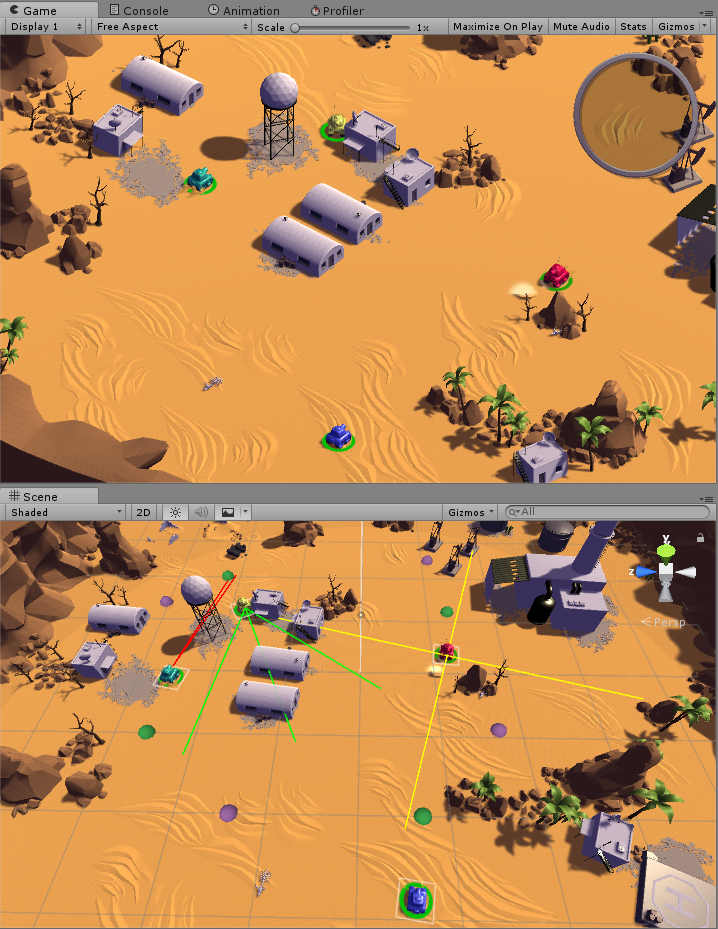
查找角度:90、精度:6,追杀角度15、精度2。

- 红坦克是查找时敌人发出的绿色射线;
- 绿坦克是追杀时发出红色射线;
- 蓝坦克在第一条默认射线就检测到敌人,所以就不需要在添加额外角度射线。
查找精度:50、追杀精度:10。
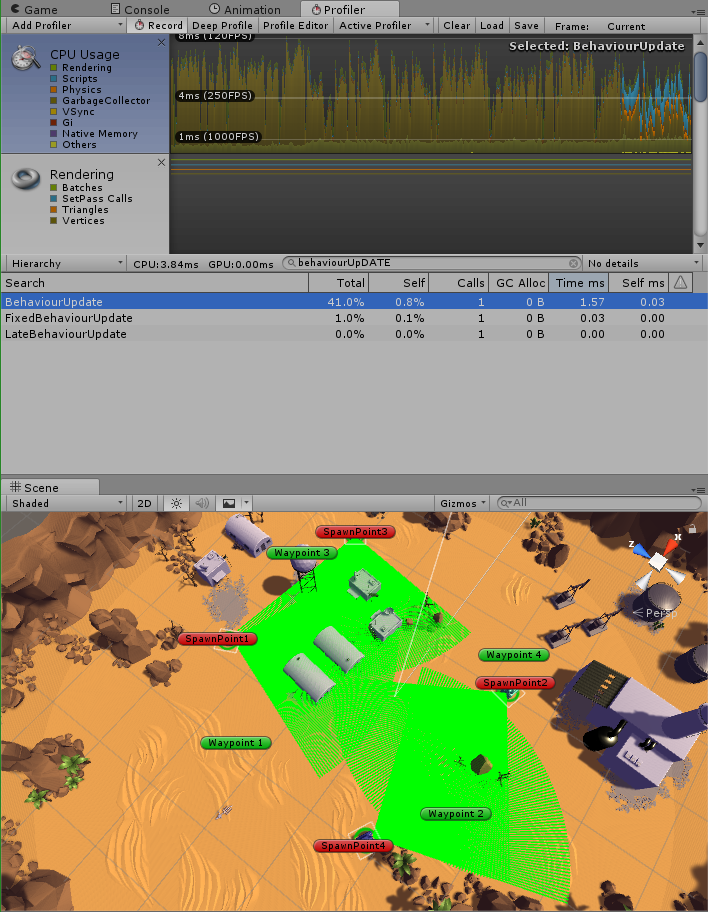
基本像个扇形了,而且性能没有太大变化。
-
方法2:
相对方法一,可以说又省代码,又省内存。缺点就是检测扇形区域每一帧只有一个方向。
原理:只用一条射线,每次调用的时候旋转一定角度。如果一秒走30帧,那就是一秒可以变化30次角度。一般来说也够了。实现起来就相当简单了。使用Mathf.Repeat来获取角度就好了。//
// LookDecision
//[Range(0, 360)]
public float angle = 90f; //检测前方角度范围
[Range(0, 100)]
public float distance = 25f; //检测距离
public float rotatePerSecond = 90f; //每秒旋转角度//放射线检测
private bool Look(StateController controller)
{
if (LookAround(controller, Quaternion.Euler(0, -angle / 2 + Mathf.Repeat(rotatePerSecond * Time.time, angle), 0), distance, debugColor))
return true;
return false;
} 
上图中射线其实是一直在摆动的。
-
方法3:
就是结合方法1和方法2了,多条线同时旋转检测,算是结合前两者的优点了。
原理就是在方法2基础上,多加一层循环,即同一帧有多条线检测,如下修改代码。
-
[Range(1, 50)]
public float accuracy = 1f; //检测精度private bool Look(StateController controller)
{
float subAngle = angle / accuracy; //每条射线需要检测的角度范围
for (int i = 0; i < accuracy; i++)
if (LookAround(controller, Quaternion.Euler(0, -angle / 2 + i * subAngle + Mathf.Repeat(rotatePerSecond * Time.time, subAngle), 0), distance, debugColor))
return true;
return false;
} 
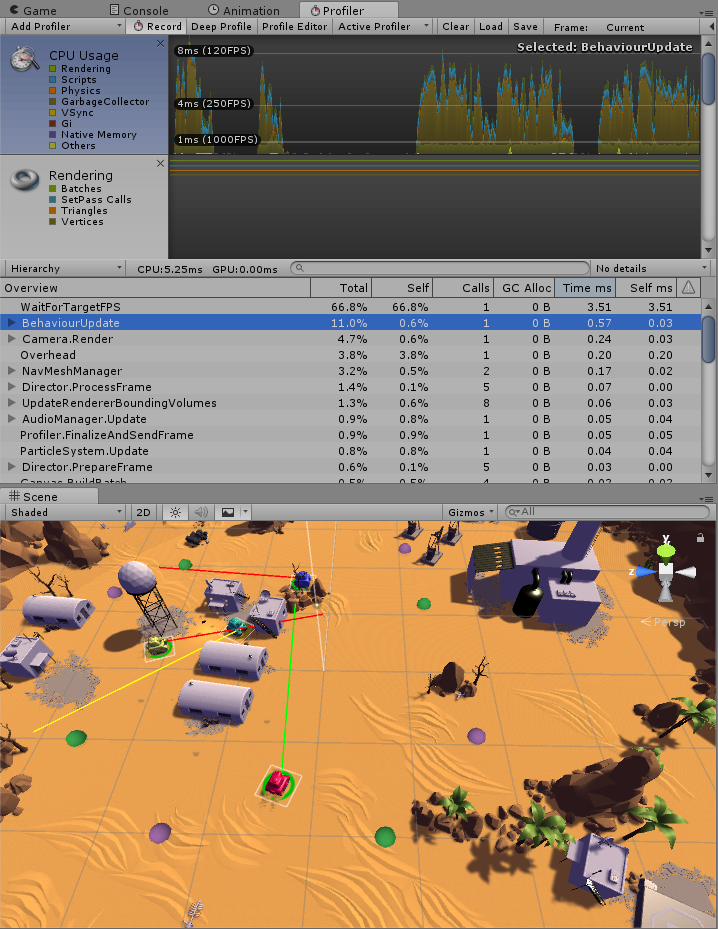
说明:
蓝色坦克:攻击了红坦克。红坦克就同时放出
红色坦克:巡逻时不知道被谁打了,同时放出四条黄色射线旋转检测,每条射线只要旋转90°就可以检测完周围360°。
绿色坦克:发现了敌人,每次先直接射出一条正前方的红线(因为攻击时经常只需要这一条第一帧就抓到敌人),另外一条就是旋转的检测射线。
黄色坦克:正在巡逻。三条绿色同时旋转,检测角度为90°,所以每条射线只要旋转30°。