版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。
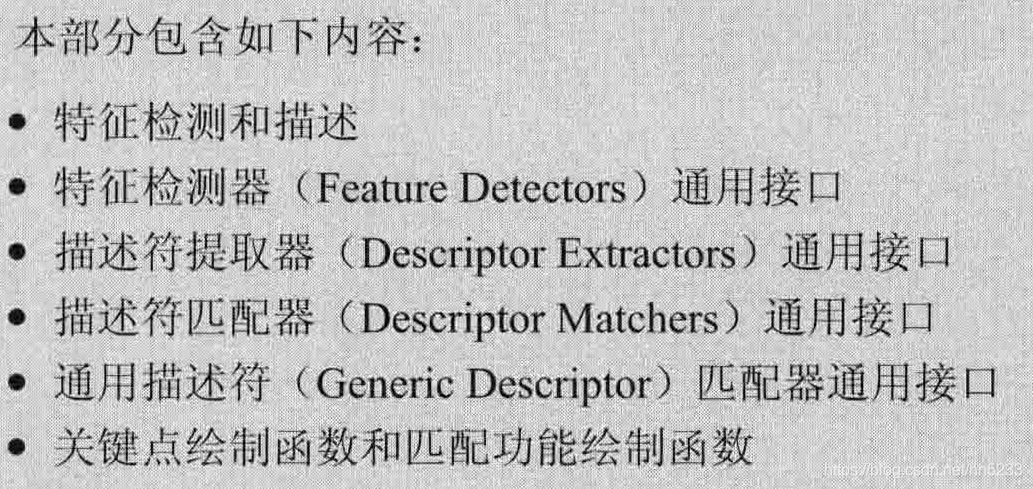
第四部分:
feature2d组件–只在opencv2中有,opencv3移植到第三方库xfeature2d中,并且不稳定!
第十章:角点检测

思考:这里的意思应该是说,"角点"不只是传统意义上的角点了,而是代表一种特征点(描述某类特性)
1.Harris角点检测–基于模板(亮度)的检测
(1) 兴趣点和角点
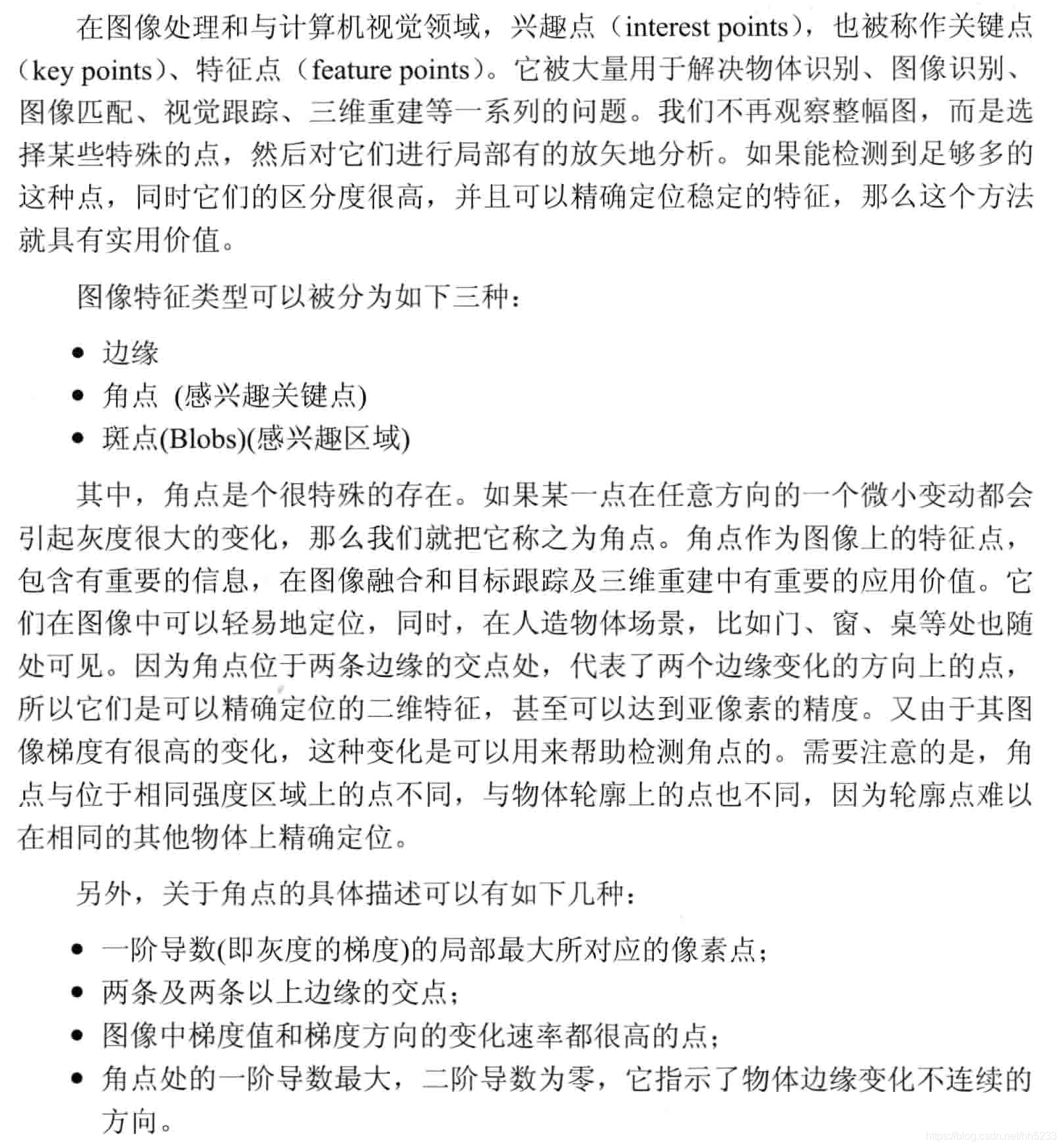
注:角点:在任意方向的一个微小变动都会引起灰度很大的变化!
(2)角点检测


注:基于模板的检测:图像亮度的变化,将与零点亮度对比足够大的点定义为角点
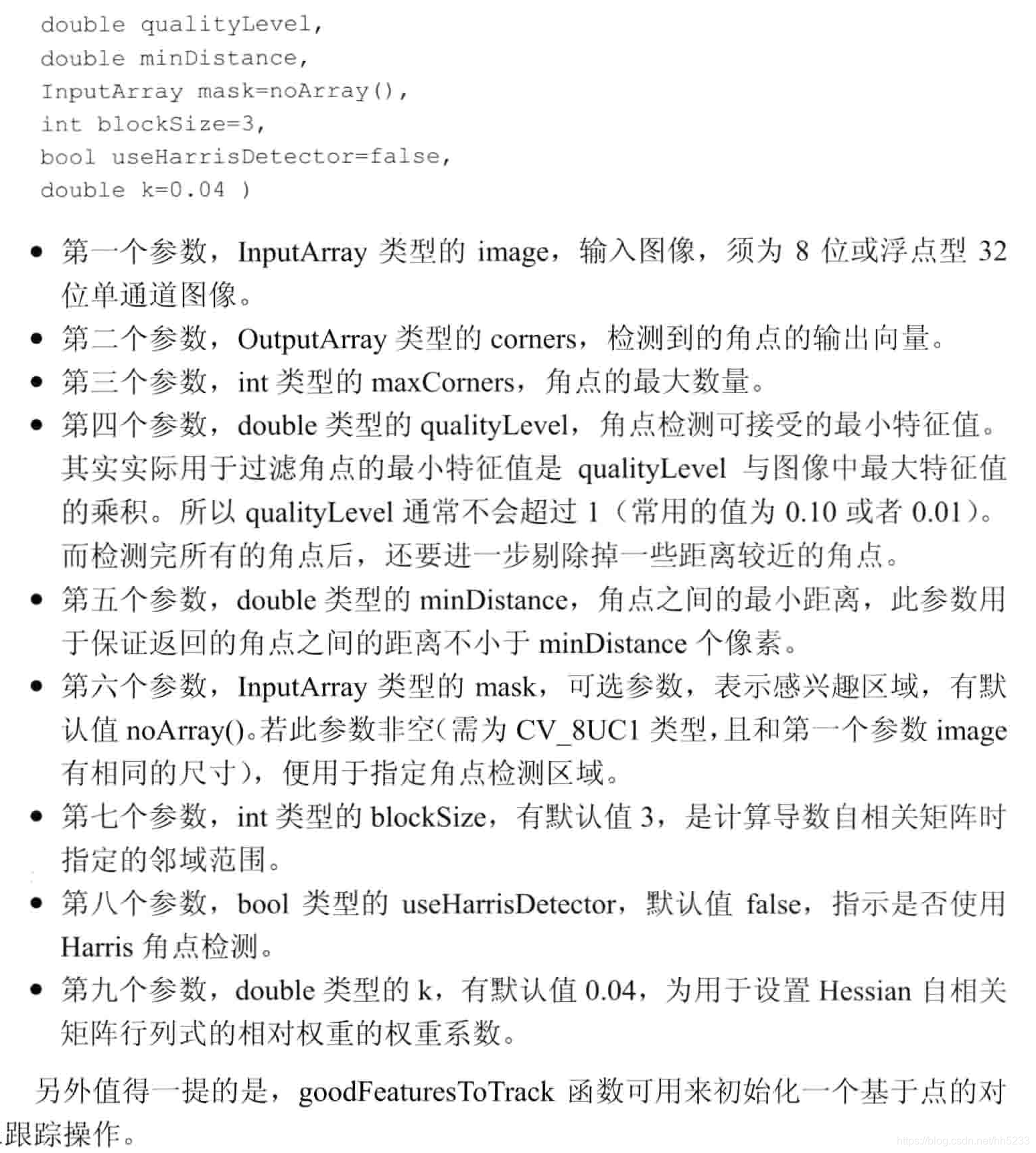
(3)实现Harris角点检测的函数:cornerHarris()
2.shi-Tomasi角点检测–相较Harri检测方法,检测出的角点会更准确
(1)确定图像强角点:goodFeaturToTrack()
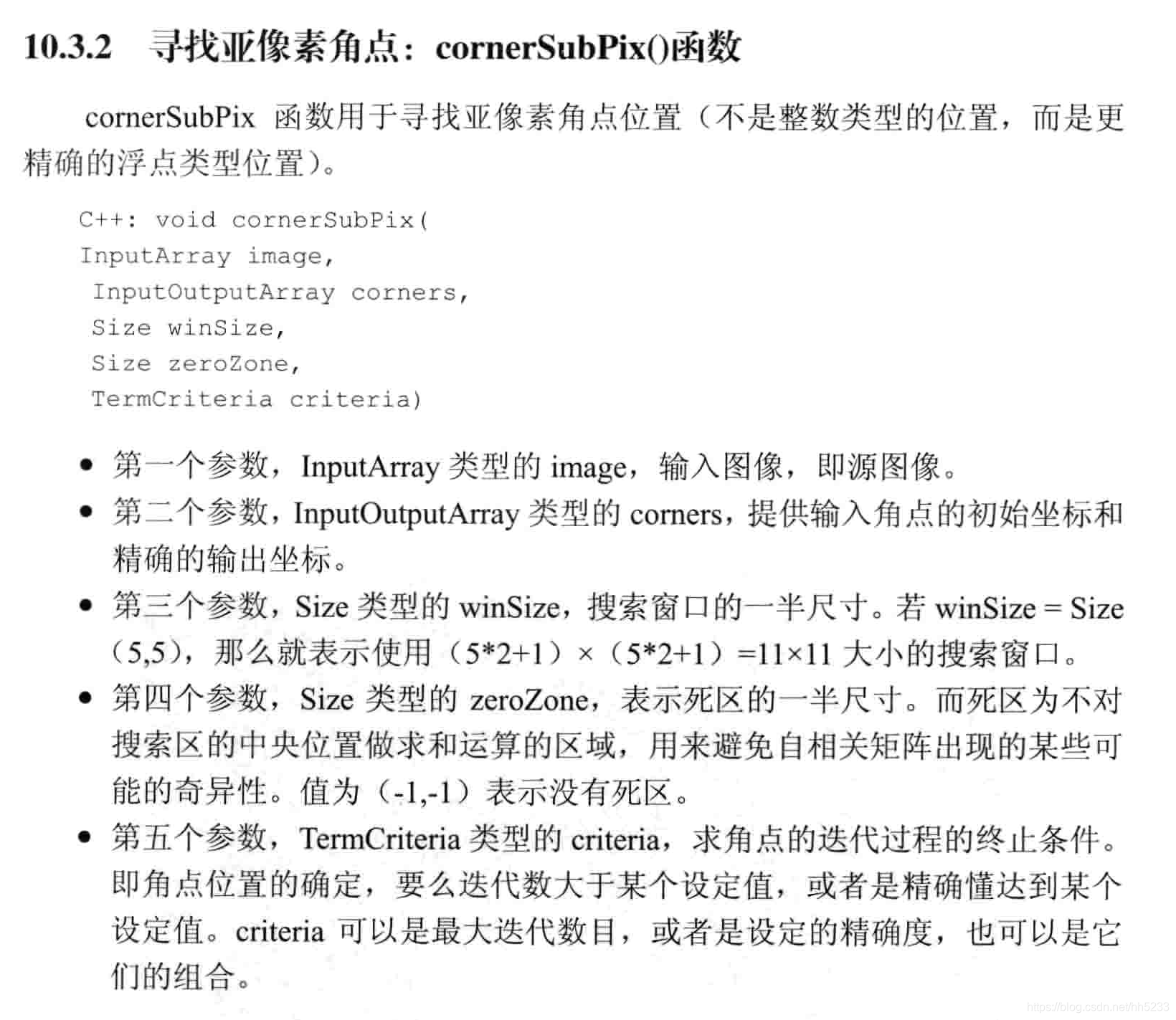
3.亚像素级角点检测
解释:https://blog.csdn.net/andylanzhiyong/article/details/84675463
(1)寻找亚像素角点函数:cornerSubPix() 函数
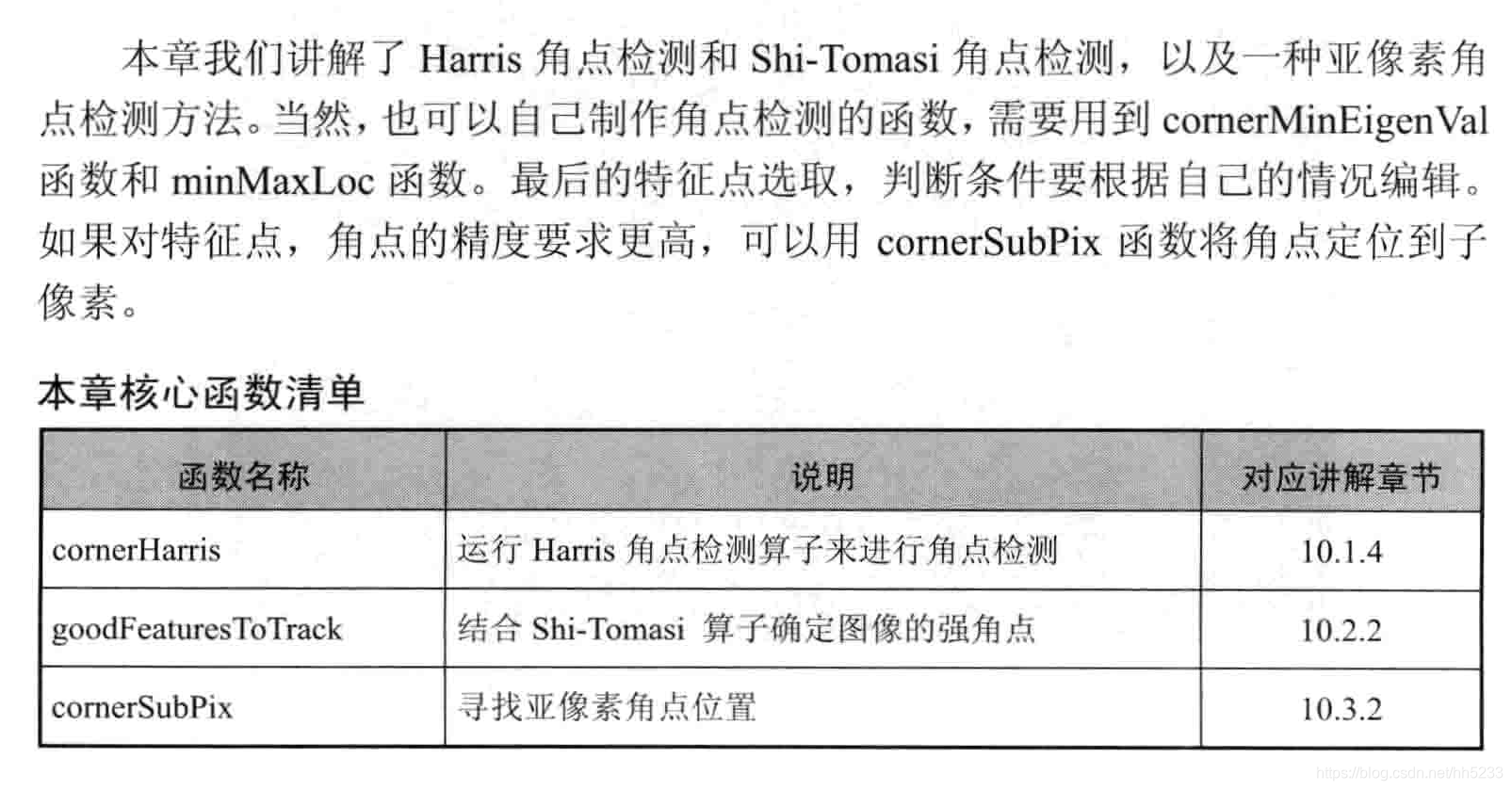
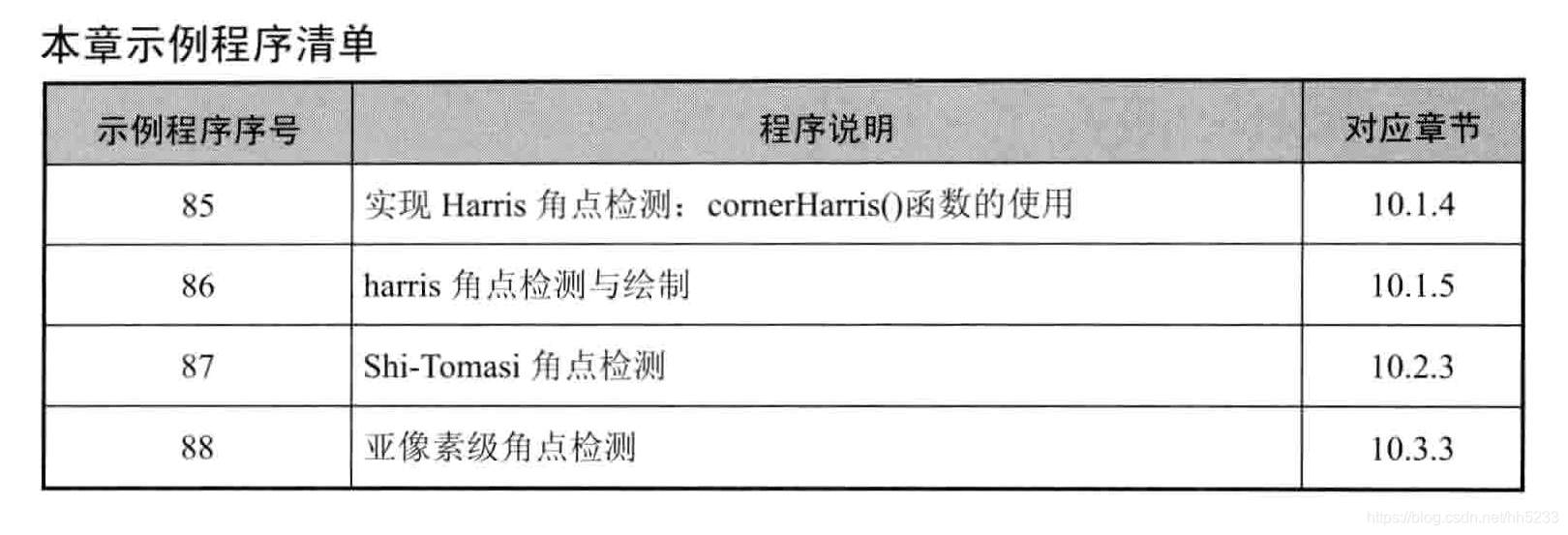
总结