之前在《机器学习---感知机(Machine Learning Perceptron)》一文中介绍了感知机算法的理论知识,现在让我们来实践一下。
有两个数据文件:data1和data2,分别用于PLA和Pocket Algorithm。可在以下地址下载:
先回顾一下感知机算法:
1,初始化w
2,找出一个分类错误点
3,修正错误,假设迭代次数为t次(t=1,2,...),那么修正公式为:![]()
4,直至没有分类错误点,返回最终的w
接下来让我们安照算法步骤,一步一步进行。
首先导入需要用到的库,其中pandas用于读取数据文件,matplotlib用于画图,numpy用于数组运算:
import pandas as pd import matplotlib.pyplot as plt fig,ax=plt.subplots() import numpy as np
读取数据文件:
data=pd.read_csv(r"...\data1.csv",header=None)
提取特征和目标:
X=data.iloc[:,[0,1]] #提取特征 y=data[2] #提取目标
提取不同类别的数据,用于画图:
x_positive=X[y==1]
x_negative=X[y==-1]
画图:
ax.scatter(x_positive[0],x_positive[1],marker="o",label="y=+1") ax.scatter(x_negative[0],x_negative[1],marker="x",label="y=-1") ax.legend() ax.set_xlabel("x1") ax.set_ylabel("x2") ax.set_title("Original Data")

从上图可以看到数据是线性可分的,接下来我们先把数据归一化:
mean=X.mean(axis=0) sigma=X.std(axis=0) X=(X-mean)/sigma
再画图看看:

设置好特征和权重,用于数组运算:
X[2]=np.ones((X.shape[0],1)) #给特征增加一列常数项 X=X.values #把特征转换成ndarray格式 ###初始化w### w=X[0].copy() #选取原点到第一个点的向量作为w的初始值 w[2]=0 #增加一项---阈值,阈值初始化为0 w=w.reshape(3,1)
画出初始法向量和初始分类直线(因为是在二维空间,所以是直线):
###画出初始法向量### ax.scatter(w[0],w[1],color="red") ax.plot([0,w[0]],[0,w[1]]) ###画出初始分类直线### line_x=np.linspace(-3,3,10) line_y=(-w[2]-w[0]*line_x)/w[1] ax.plot(line_x,line_y)
注:因为w1x1+w2x2+b=0,现在我们已经有了w和b的值,因此只需要设置x1的值,就可以计算出x2的值。
注:注意要适当调整一下图像比例,否则显示不对,具体请见完整代码。

现在我们已经完成初始化w的工作,接下去就是要找出分类错误点。现在的思路是:先计算出在当前参数w下的预测目标,然后把其和目标y进行比较,这样就可以知道分类错误的地方了。
scores=np.dot(X,w) #把特征和权重点乘,得到目前参数下预测出的目标分数 y_pred=np.ones((scores.shape[0],1)) #设置预测目标,初始化值全为1,形状和目标分数相同 y=y.values.reshape((y_pred.shape[0],1)) #把目标转换成ndarray格式,形状和预测目标相同 loc_negative=np.where(scores<0)[0] #标记分数为负数的地方 y_pred[loc_negative]=-1 #使标记为负数的地方预测目标变为-1 loc_wrong=np.where(y_pred!=y)[0] #标记分类错误的地方
找出分类错误点后,我们对w进行修正(这里选取第一个分类错误点进行更新):
w=w+y[loc_wrong][0]*X[loc_wrong,:][0].reshape(3,1)
最后进行迭代就可以找出最终的w:
for i in range(100): scores=np.dot(X,w) #把特征和权重点乘,得到此参数下预测出的目标分数 y_pred=np.ones((scores.shape[0],1)) #设置预测目标,初始化值全为1,形状和目标分数相同 loc_negative=np.where(scores<0)[0] #标记分数为负数的地方 y_pred[loc_negative]=-1 #使标记为负数的地方预测目标变为-1 loc_wrong=np.where(y_pred!=y)[0] #标记分类错误的地方 print("错误分类点有{}个。".format(len(loc_wrong))) if len(loc_wrong)>0: w=w+y[loc_wrong][0]*X[loc_wrong,:][0].reshape(3,1) else: break print("参数w:{}".format(w)) print("分类直线:{}x1+{}x2+{}=0".format(w[0][0],w[1][0],w[2][0])) line_x=np.linspace(-3,3,10) line_y=(-w[2]-w[0]*line_x)/w[1] ax.plot(line_x,line_y)
运行结果:
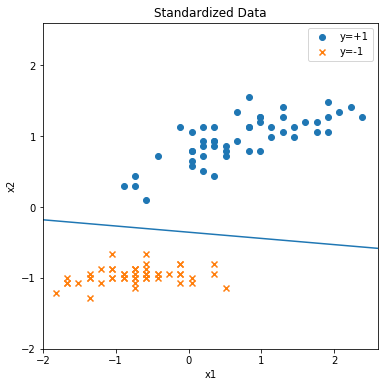
错误分类点有5个。 错误分类点有2个。 错误分类点有3个。 错误分类点有0个。 参数w:[[0.24622161] [2.81328976] [1. ]] 分类直线:0.2462216100520832x1+2.8132897563595076x2+1.0=0
画出的分类直线:
最后的最后,将上述代码整理一下。感知机算法完整代码如下(除去用于画图的代码,核心代码不到20行):
import pandas as pd import matplotlib.pyplot as plt fig,ax=plt.subplots(figsize=(6,6)) import numpy as np data=pd.read_csv(r"...\data1.csv",header=None) X=data.iloc[:,[0,1]] #提取特征 y=data[2] #提取目标 ###把数据归一化### mean=X.mean(axis=0) sigma=X.std(axis=0) X=(X-mean)/sigma ###提取不同类别的数据,用于画图### x_positive=X[y==1] x_negative=X[y==-1] ax.scatter(x_positive[0],x_positive[1],marker="o",label="y=+1") ax.scatter(x_negative[0],x_negative[1],marker="x",label="y=-1") ax.legend() ax.set_xlabel("x1") ax.set_ylabel("x2") ax.set_title("Standardized Data") ax.set_xlim(-2,2.6) ax.set_ylim(-2,2.6) X[2]=np.ones((X.shape[0],1)) #给特征增加一列常数项 X=X.values #把特征转换成ndarray格式 ###初始化w### w=X[0].copy() #选取原点到第一个点的向量作为w的初始值 w[2]=0 #增加一项---阈值,阈值初始化为0 w=w.reshape(3,1) y=y.values.reshape(100,1) #把目标转换成ndarray格式,形状和预测目标相同 def compare(X,w,y): ###用于比较预测目标y_pred和实际目标y是否相符,返回分类错误的地方loc_wrong### ###输入特征,权重,目标### scores=np.dot(X,w) #把特征和权重点乘,得到此参数下预测出的目标分数 y_pred=np.ones((scores.shape[0],1)) #设置预测目标,初始化值全为1,形状和目标分数相同 loc_negative=np.where(scores<0)[0] #标记分数为负数的地方 y_pred[loc_negative]=-1 #使标记为负数的地方预测目标变为-1 loc_wrong=np.where(y_pred!=y)[0] #标记分类错误的地方 return loc_wrong def update(X,w,y): ###用于更新权重w,返回更新后的权重w### ###输入特征,权重,目标### w=w+y[compare(X,w,y)][0]*X[compare(X,w,y),:][0].reshape(3,1) return w def perceptron(X,w,y): ###感知机算法,显示最终的权重和分类直线,并画出分类直线### ###输入特征,初始权重,目标### while len(compare(X,w,y))>0: print("错误分类点有{}个。".format(len(compare(X,w,y)))) w=update(X,w,y) print("参数w:{}".format(w)) print("分类直线:{}x1+{}x2+{}=0".format(w[0][0],w[1][0],w[2][0])) line_x=np.linspace(-3,3,10) line_y=(-w[2]-w[0]*line_x)/w[1] ax.plot(line_x,line_y) plt.show()
接下来看一下data2文件和口袋算法的应用。首先回顾一下Pocket Algorithm:
1,初始化w,把w作为最好的解放入口袋
2,随机找出一个分类错误点
3,修正错误,假设迭代次数为t次(t=1,2,...),那么修正公式为:![]()
4,如果wt+1比w犯的错误少,那么用wt+1替代w,放入口袋
5,经过t次迭代后停止,返回口袋里最终的结果
口袋算法和PLA差不多,因此代码还是用上述感知机算法的框架,只需要局部修改一下即可。
首先画出原始数据图像和归一化后的数据图像:(代码和之前类似,故在此不再赘述)

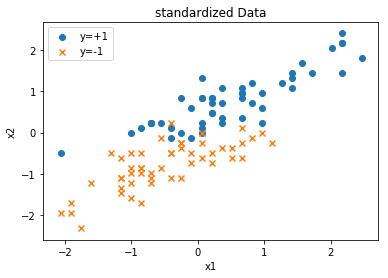
可以看到数据是线性不可分的。接下来修改一下perceptron函数和update函数。
def perceptron_pocket(X,w,y): ###感知机口袋算法,显示n次迭代后最好的权重和分类直线,并画出分类直线### ###输入特征,初始权重,目标### best_len=len(compare(X,w,y)) #初始化最少的分类错误点个数 best_w=w #初始化口袋里最好的参数w for i in range(100): print("错误分类点有{}个。".format(len(compare(X,w,y)))) w=update(X,w,y) #如果当前参数下分类错误点个数小于最少的分类错误点个数,那么更新最少的分类错误点个数和口袋里最好的参数w if len(compare(X,w,y))<best_len: best_len=len(compare(X,w,y)) best_w=w print("参数best_w:{}".format(best_w)) print("分类直线:{}x1+{}x2+{}=0".format(best_w[0][0],best_w[1][0],best_w[2][0])) print("最少分类错误点的个数:{}个".format(best_len)) line_x=np.linspace(-3,3,10) line_y=(-best_w[2]-best_w[0]*line_x)/best_w[1] ax.plot(line_x,line_y)
perceptron函数主要增加了一个口袋,用于存放最好的解,函数名称改为perceptron_pocket。
def update(X,w,y): ###用于更新权重w,返回更新后的权重w### ###输入特征,权重,目标### num=len(compare(X,w,y)) #分类错误点的个数 w=w+y[compare(X,w,y)][np.random.choice(num)]*X[compare(X,w,y),:][np.random.choice(num)].reshape(3,1) return w
update函数将“选取第一个分类错误点进行更新”修改为“随机选取分类错误点进行更新”。
运行结果如下(由于带有随机性,每次运行结果都不同):
错误分类点有9个。 错误分类点有30个。 错误分类点有11个。 错误分类点有24个。 错误分类点有5个。 错误分类点有22个。 错误分类点有16个。 错误分类点有17个。 错误分类点有5个。 错误分类点有15个。 错误分类点有5个。 错误分类点有15个。 错误分类点有6个。 错误分类点有13个。 错误分类点有7个。 错误分类点有12个。 错误分类点有9个。 错误分类点有14个。 错误分类点有12个。 错误分类点有16个。 错误分类点有9个。 错误分类点有10个。 错误分类点有12个。 错误分类点有12个。 错误分类点有7个。 错误分类点有16个。 错误分类点有5个。 错误分类点有7个。 错误分类点有6个。 错误分类点有10个。 错误分类点有6个。 错误分类点有9个。 错误分类点有11个。 错误分类点有7个。 错误分类点有5个。 错误分类点有11个。 错误分类点有6个。 错误分类点有8个。 错误分类点有6个。 错误分类点有12个。 错误分类点有6个。 错误分类点有11个。 错误分类点有14个。 错误分类点有10个。 错误分类点有5个。 错误分类点有5个。 错误分类点有5个。 错误分类点有4个。 错误分类点有6个。 错误分类点有6个。 错误分类点有6个。 错误分类点有9个。 错误分类点有6个。 错误分类点有10个。 错误分类点有6个。 错误分类点有7个。 错误分类点有6个。 错误分类点有10个。 错误分类点有6个。 错误分类点有10个。 错误分类点有5个。 错误分类点有10个。 错误分类点有6个。 错误分类点有8个。 错误分类点有6个。 错误分类点有5个。 错误分类点有6个。 错误分类点有7个。 错误分类点有9个。 错误分类点有7个。 错误分类点有6个。 错误分类点有7个。 错误分类点有6个。 错误分类点有4个。 错误分类点有6个。 错误分类点有10个。 错误分类点有6个。 错误分类点有11个。 错误分类点有15个。 错误分类点有10个。 错误分类点有5个。 错误分类点有5个。 错误分类点有6个。 错误分类点有9个。 错误分类点有6个。 错误分类点有8个。 错误分类点有5个。 错误分类点有10个。 错误分类点有5个。 错误分类点有10个。 错误分类点有6个。 错误分类点有10个。 错误分类点有18个。 错误分类点有9个。 错误分类点有10个。 错误分类点有10个。 错误分类点有5个。 错误分类点有5个。 错误分类点有6个。 错误分类点有8个。 参数best_w:[[-1.09227879] [ 5.19393394] [ 1. ]] 分类直线:-1.0922787897353627x1+5.193933943326238x2+1.0=0 最少分类错误点的个数:4个
分类直线画图如下:

口袋算法完整代码如下:
import pandas as pd import matplotlib.pyplot as plt fig,ax=plt.subplots() import numpy as np data=pd.read_csv(r"...\data2.csv",header=None) X=data.iloc[:,[0,1]] #提取特征 y=data[2] #提取目标 ###把数据归一化### mean=X.mean(axis=0) sigma=X.std(axis=0) X=(X-mean)/sigma ###提取不同类别的数据,用于画图### x_positive=X[y==1] x_negative=X[y==-1] ax.scatter(x_positive[0],x_positive[1],marker="o",label="y=+1") ax.scatter(x_negative[0],x_negative[1],marker="x",label="y=-1") ax.legend() ax.set_xlabel("x1") ax.set_ylabel("x2") ax.set_title("standardized Data") X[2]=np.ones((X.shape[0],1)) #增加一列常数项 X=X.values #把特征转换成ndarray格式 ###初始化w### w=X[0].copy() #选取原点到第一个点的向量作为w的初始值 w[2]=0 #增加一项---阈值,阈值初始化为0 w=w.reshape(3,1) y=y.values.reshape(100,1) #把目标转换成ndarray格式,形状和预测目标相同 def compare(X,w,y): ###用于比较预测目标y_pred和实际目标y是否相符,返回分类错误的地方loc_wrong### ###输入特征,权重,目标### scores=np.dot(X,w) #把特征和权重点乘,得到此参数下预测出的目标分数 y_pred=np.ones((scores.shape[0],1)) #设置预测目标,初始化值全为1,形状和目标分数相同 loc_negative=np.where(scores<0)[0] #标记分数为负数的地方 y_pred[loc_negative]=-1 #使标记为负数的地方预测目标变为-1 loc_wrong=np.where(y_pred!=y)[0] #标记分类错误的地方 return loc_wrong def update(X,w,y): ###用于更新权重w,返回更新后的权重w### ###输入特征,权重,目标### num=len(compare(X,w,y)) #分类错误点的个数 w=w+y[compare(X,w,y)][np.random.choice(num)]*X[compare(X,w,y),:][np.random.choice(num)].reshape(3,1) return w def perceptron_pocket(X,w,y): ###感知机口袋算法,显示n次迭代后最好的权重和分类直线,并画出分类直线### ###输入特征,初始权重,目标### best_len=len(compare(X,w,y)) #初始化最少的分类错误点个数 best_w=w #初始化口袋里最好的参数w for i in range(100): print("错误分类点有{}个。".format(len(compare(X,w,y)))) w=update(X,w,y) #如果当前参数下分类错误点个数小于最少的分类错误点个数,那么更新最少的分类错误点个数和口袋里最好的参数w if len(compare(X,w,y))<best_len: best_len=len(compare(X,w,y)) best_w=w print("参数best_w:{}".format(best_w)) print("分类直线:{}x1+{}x2+{}=0".format(best_w[0][0],best_w[1][0],best_w[2][0])) print("最少分类错误点的个数:{}个".format(best_len)) line_x=np.linspace(-3,3,10) line_y=(-best_w[2]-best_w[0]*line_x)/best_w[1] ax.plot(line_x,line_y) plt.show()