基于互信息的匹配代价计算由于需要初始视差值,所以需要通过分层迭代的方式得到较为准确的匹配代价值,而且概率分布计算稍显复杂,这导致代价计算的效率并不高。学者Zabih和Woodfill 1 提出的基于Census变换法也被广泛用于匹配代价计算。Census变换是使用像素邻域内的局部灰度差异将像素灰度转换为比特串,思路非常简单,通过将邻域窗口(窗口大小为n×m,n和m都为奇数)内的像素灰度值与窗口中心像素的灰度值进行比较,将比较得到的布尔值映射到一个比特串中,最后用比特串的值作为中心像素的Census变换值Cs,如公式1所示:
式1

其中,n’和m’分别为不大于n和m的一半的最大整数,为比特位的逐位连接运算,ξ运算则由公式2定义:
式2
基于Census变换的匹配代价计算方法是计算左右影像对应的两个像素的Census变换值的汉明(Hamming)距离,即
式3

Hamming距离即两个比特串的对应位不相同的数量,计算方法为将两个比特串进行亦或运算,再统计亦或运算结果的比特位中不为1的个数。
基于Census变换的匹配代价计算方法如图1所示,
图1 汉明距离示意图
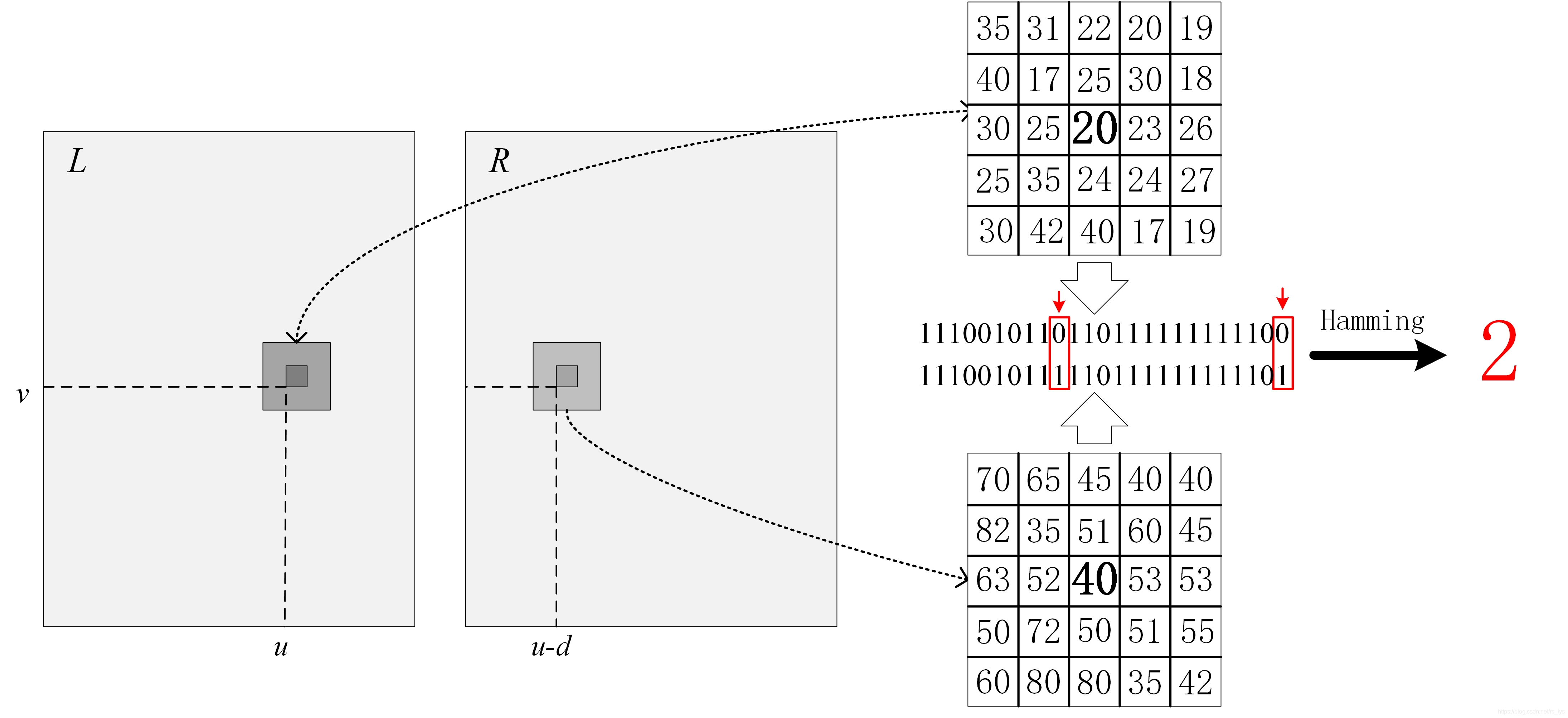
从图1可以看出,Census变换对整体的明暗变化并不敏感,因为是比较的相对灰度关系,所以即使左右影像亮度不一致,也能得到较好的匹配效果。
Census相比互信息还具有并行度高的优点,因为Census变换值是局部窗口运算,所以每个像素可以独立运算,这个特性让其可以很好的设计多线程并行计算模型,无论是CPU并行还是GPU并行都能达到非常高的并行效率。

在实际匹配过程中,简单的执行匹配代价计算并不能得到高质量的视差图,必须经过代价聚合步骤,聚合后的代价能够更准确地反应匹配相似度,下篇博客中,将为大家详解SGM的代价聚合步骤,查看请点击 >> link
ZABIH R, WOODFILL J. Non-parametric local transforms for computing visual correspondence[M]. 1994: 151-158. ↩︎