Opencv3.2.0使用SIFT/SURF等算子的解决方法
一、需要文件下载
OpenCV3.2.0 : https://github.com/opencv/opencv/releases/download/3.2.0/opencv-3.2.0-vc14.exe
opencv_contrib3.2.0 : https://github.com/opencv/opencv_contrib/archive/3.2.0.zip (可以根据自己本机已经配置的opencv版本下载对应的opencv_contrib)
opencv_contrib: https://github.com/opencv/opencv_contrib/tags
CMake(可以去官网下载较新的版本) : https://cmake.org/download/
二、文件安装
1.安装opencv(若本机之前已装好,跳过此步)
将下载好的opencv-3.2.0-vc14.exe(不是.zip文件)双击打开->选择安装目录D:\Program Files (x86)\OpenCV3.2.0
装好之后在安装目录下会有个opencv的文件夹

然后最好把下载下来的opencv_contrib也解压在该目录下创立的文件夹opencv_extra里
三、CMake配置生成文件
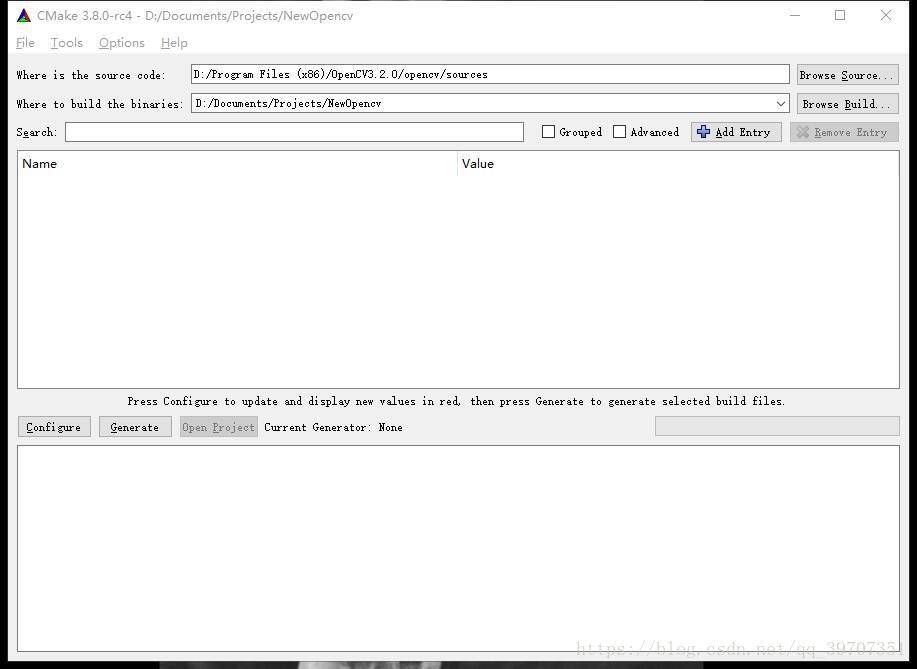
源路径选择的是opencv3.2.0安装目录下的sources目录,目的路径随意选择一个空目录即可;然后点击Configure后出现如下选择框:
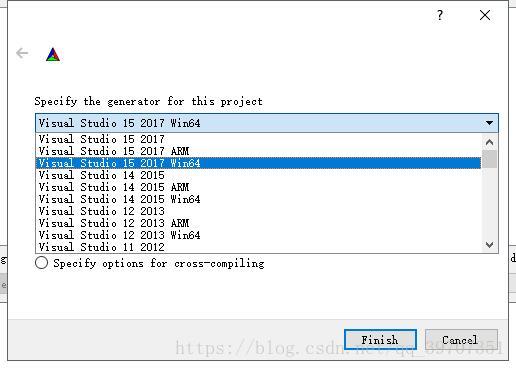
选择对应环境即可,VS2017,win64;点finish;等待ing… 直到出现如下界面:
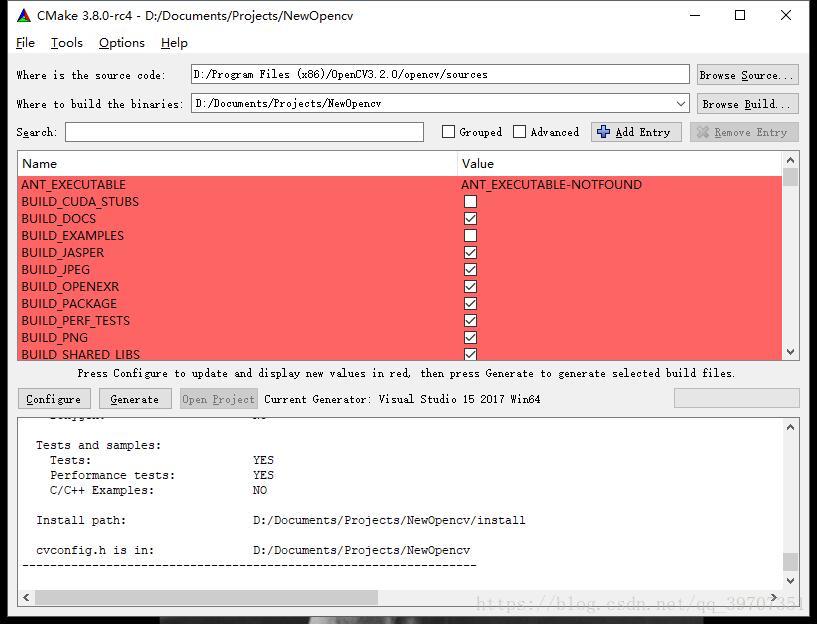
往下拉直到找到OPENCV_EXTRA_MODULES_PATH 选择解压opencv_contrib目录下的modules文件夹,如下图(其他选项最好不要随意乱动,默认选项即可):

目录选好之后,点击Generate;继续等待ing…
这一步我在刚开始配置的时候总是会在下载protobuf-cpp-3.1.0.tar.gz文件的时候报错,之后上网找了解决方法,需要自己手动下载一个protobuf-cpp-3.1.0.tar.gz去替换如下所示路径中的文件:
D:\Program Files (x86)\OpenCV3.2.0\opencv_extra\opencv_contrib-3.2.0\modules\dnn.download\bd5e3eed635a8d32e2b99658633815ef\v3.1.0目录下的protobuf-cpp-3.1.0.tar.gz(亲测有效)
附上下载地址:链接: https://download.csdn.net/download/qq_39707351/10454808
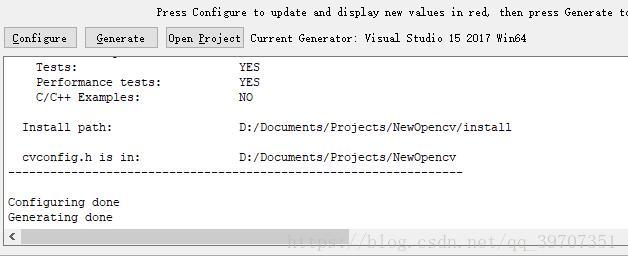
替换并且配置后出现Configure done;Generate done就是CMake成功了:
四、编译生成install
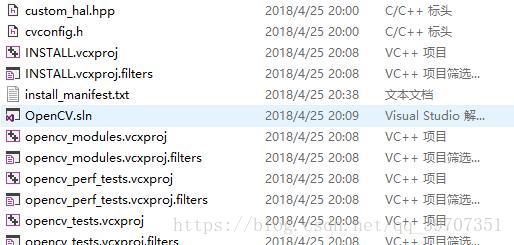
1、首先在CMake的目的路径 D:\Documents\Projects\NewOpencv 下找到OpenCV.sln文件打开:
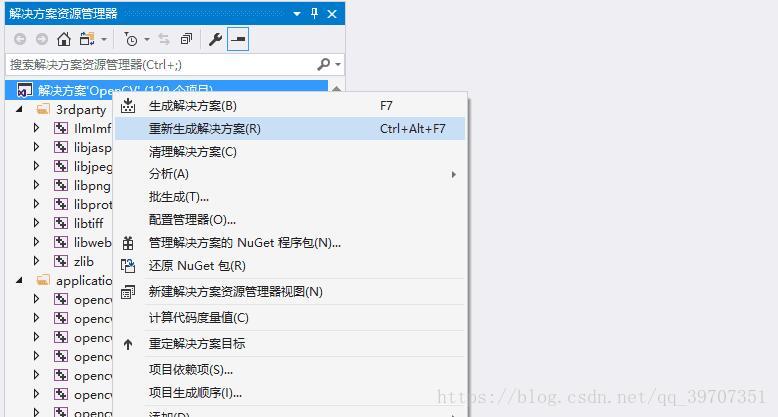
2、然后右击解决方案,选择重新生成解决方案,操作如下图所示,然后继续等待若干分钟ing…(这一步挺久的):
3、生成成功之后->右击CMakeTargets目录下的INSTALL->选择仅用于项目->仅生成INSTALL;如下图所示生成install文件,继续等待ing…:
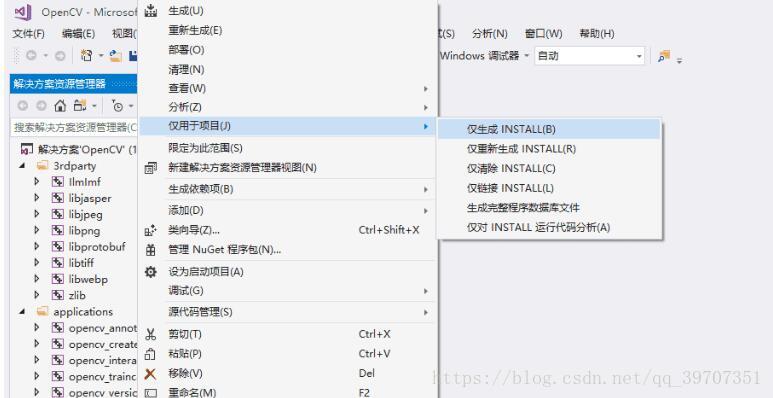
4、显示成功1,失败后面都是0,恭喜就表示生成成功了。
五、配置项目属性
生成成功之后,在目的路径会新生成一个Install文件夹,该文件夹就相当于结合了opencv_contrib的opencv库目录。
1、将目的路径 D:\Documents\Projects\NewOpencv\install\bin 路径加入到电脑的环境变量当中(不会加的话百度,这里不详说了)
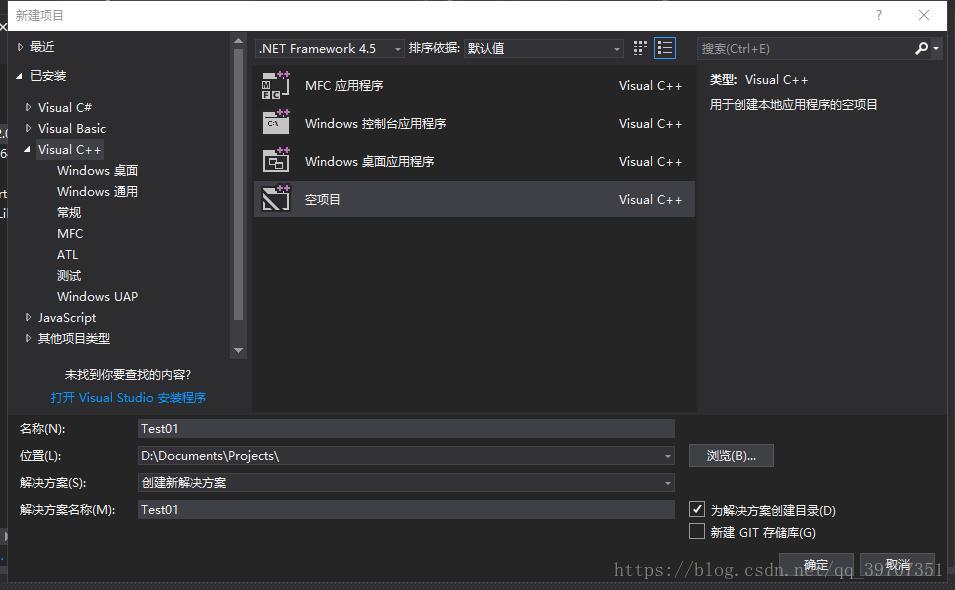
2、打开VS->新建一个空项目,如下:
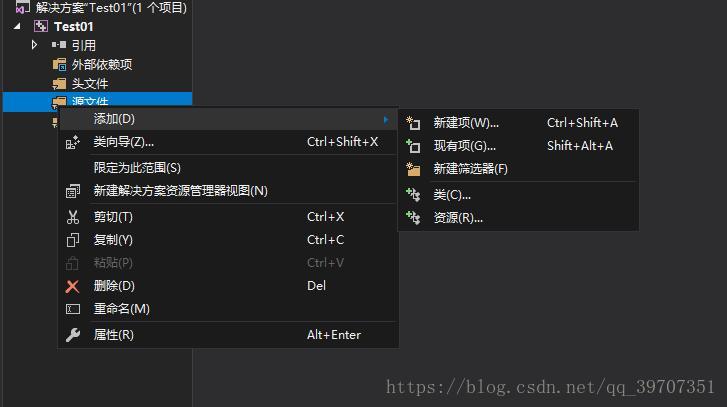
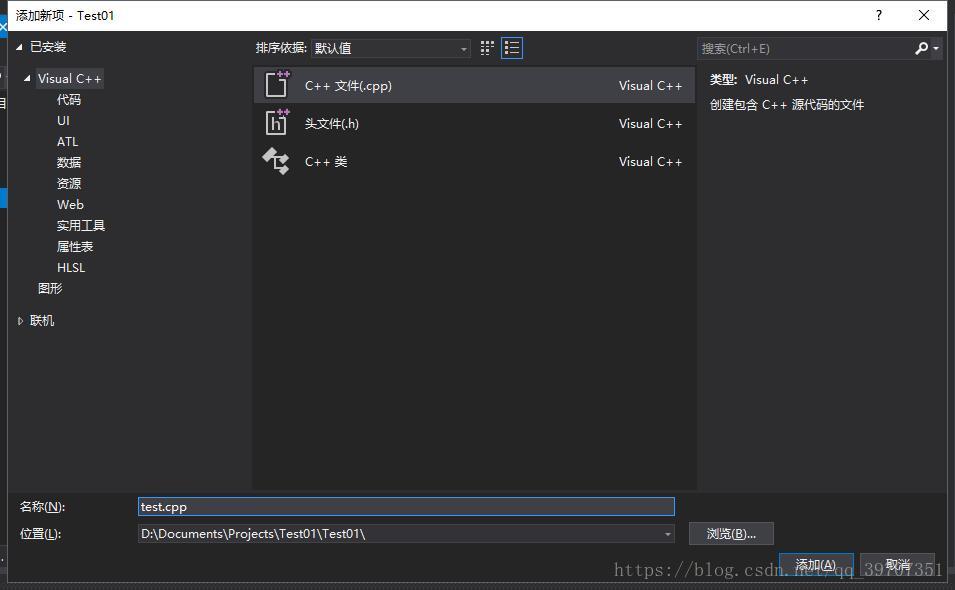
3、创建空项目之后->源文件上右键->添加新建项目:
注意以后使用的时候都要将vs上面的解决平台选择X64,不然会出错:

4、有一种可以一劳永逸的配置属性的方法,以后用的话可以直接添加,不用每次都要配置,首先在属性管理器下(视图中可以找到)->右击Debug|X64->添加新项目属性表:
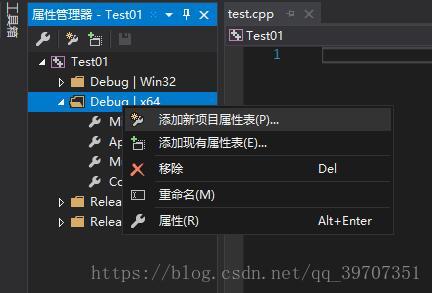
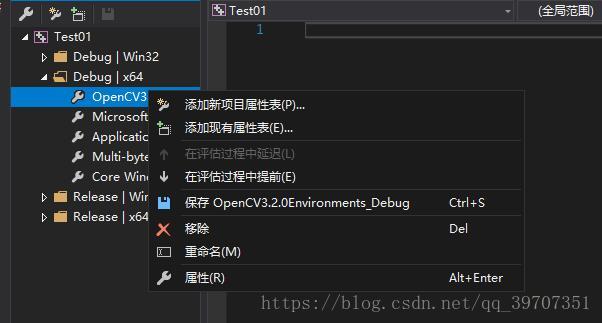
然后给它起个OpenCV3.2.0Environments_Debug方便以后找到和分辨,之后可以自己将该项目下的该配置文件保存出来,以后直接添加即可:

5、右击选择属性:
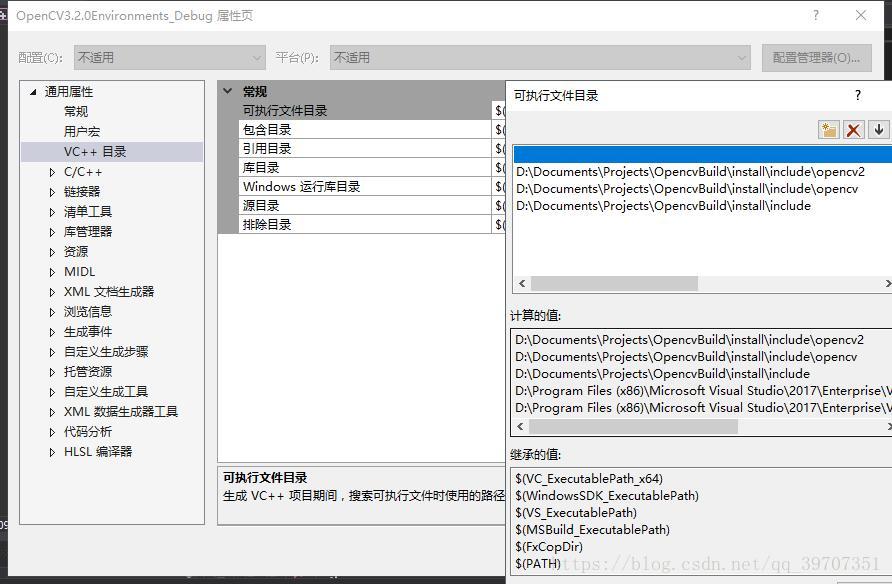
6、在vc++目录,可执行文件目录下添加之前生成的install中的三个文件夹(因为我之前已经配过了所以NewOpencv改成了之前配置的OpencvBulid文件夹),然后点击确定:
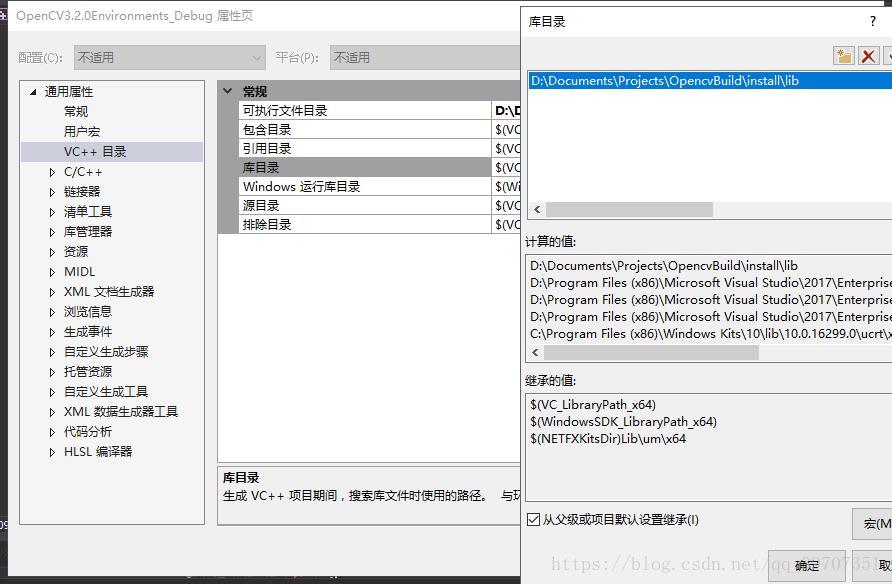
7、库目录添加install/lib路径,如下所示,点击确定和应用:
8、再选择属性->链接器->输入->附加依赖项,将下列.lib都加入进去:
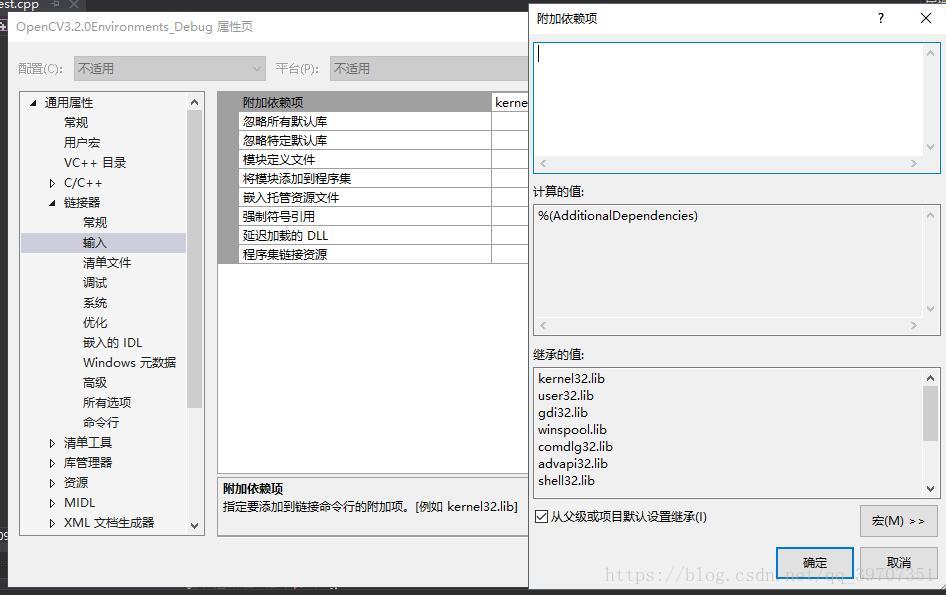
添加文件:
opencv_aruco320d.lib
opencv_bgsegm320d.lib
opencv_bioinspired320d.lib
opencv_calib3d320d.lib
opencv_ccalib320d.lib
opencv_core320d.lib
opencv_datasets320d.lib
opencv_dnn320d.lib
opencv_dpm320d.lib
opencv_face320d.lib
opencv_features2d320d.lib
opencv_flann320d.lib
opencv_fuzzy320d.lib
opencv_highgui320d.lib
opencv_imgcodecs320d.lib
opencv_imgproc320d.lib
opencv_line_descriptor320d.lib
opencv_ml320d.lib
opencv_objdetect320d.lib
opencv_optflow320d.lib
opencv_phase_unwrapping320d.lib
opencv_photo320d.lib
opencv_plot320d.lib
opencv_reg320d.lib
opencv_rgbd320d.lib
opencv_saliency320d.lib
opencv_shape320d.lib
opencv_stereo320d.lib
opencv_stitching320d.lib
opencv_structured_light320d.lib
opencv_superres320d.lib
opencv_surface_matching320d.lib
opencv_text320d.lib
opencv_tracking320d.lib
opencv_video320d.lib
opencv_videoio320d.lib
opencv_videostab320d.lib
opencv_xfeatures2d320d.lib
opencv_ximgproc320d.lib
opencv_xobjdetect320d.lib
opencv_xphoto320d.lib
到这里整个开发环境配置就结束了,让我们来测试下SIFT算子吧 (由于opencv3.0之后SIFT/SURF等算子都移植到了xfeatures2d.hpp的头文件里,和2.0等版本在nonfree.hpp里的调用方法还不太一样)
—————————————————————————–
测试代码:
#include "stdafx.h"
#include"iostream"
#include"opencv.hpp"
#include"highgui.hpp"
#include"xfeatures2d.hpp"
using namespace cv;
using namespace std;
int main()
{
Mat imageL0 = imread("Pattenimage_L.bmp");
Mat imageR0 = imread("Pattenimage_R.bmp");
Mat imageL1, imageR1;
GaussianBlur(imageL0, imageL1, Size(3, 3), 0.5);
GaussianBlur(imageR0, imageR1, Size(3, 3), 0.5);
//找出特征点
Ptr<Feature2D>f2d = xfeatures2d::SURF::create();
vector<KeyPoint> keyPoint1, keyPoint2;
f2d->detect(imageL1, keyPoint1);
f2d->detect(imageR1, keyPoint2);
drawKeypoints(imageL1, keyPoint1, imageL1, Scalar::all(-1), DrawMatchesFlags::DRAW_RICH_KEYPOINTS);
drawKeypoints(imageR1, keyPoint2, imageR1, Scalar::all(-1), DrawMatchesFlags::DRAW_RICH_KEYPOINTS);
namedWindow("KeyPoints of imageL", 0);
namedWindow("KeyPoints of imageR", 0);
imshow("KeyPoints of imageL", imageL1);
imshow("KeyPoints of imageR", imageR1);
//特征点匹配
Mat descriptors_1, descriptors_2;
f2d->compute(imageL1, keyPoint1, descriptors_1);
f2d->compute(imageR1, keyPoint2, descriptors_2);
BFMatcher matcher;
vector<DMatch>matches;
matcher.match(descriptors_1, descriptors_2, matches);
Mat imageOutput;
drawMatches(imageL1, keyPoint1, imageR1, keyPoint2, matches, imageOutput);
namedWindow("picture of matching", 0);
imshow("picture of matching", imageOutput);
waitKey(0);
return 0;
}实验结果: