配置Rikirobot的ROS网络
用户拿到车后,参考组装视频自行组装完成后,要做的第一件事情就是配置Rikirobot小车的ROS网络,配置ROS网络的目的是我们通过远程来控制或者查看显示主控上ROS系统运行的数据,这样就不用让车上装个显示器,我们可以直接在远程操作。由于我们所有系列的ROS车型使用方法一样,这里我以两驱动车型为例,给大家做讲解。
一、使用前的准备
使用前,请先搞清楚几个概念。主控端是指树莓派与工控机,也就是ROS主机;远程端是指虚拟机或者你自己安装好ROS系统并且配置好ROS网络的的远程从机;用户密码RikiRobot小车主控端与远程端的用户密码都是“123456”。
请先将电池充电,然后需要准备一台带HDMI的显示器、Usb键盘鼠标(这两者的作用仅是为了方便配置主控的网络用的)、并且有一台路由器组成有局域网,请注意一定是局域网,像用户拿到车后,将主控(树莓派或者工控机,后面所说的主控都是指树莓派或者工控机)系统接入了校园网或者公司大局域网、或者其它的非单纯意义的局域网都会导致ROS网络配置失败,而最终不能通过远程控制小车。二、配置ROS网络
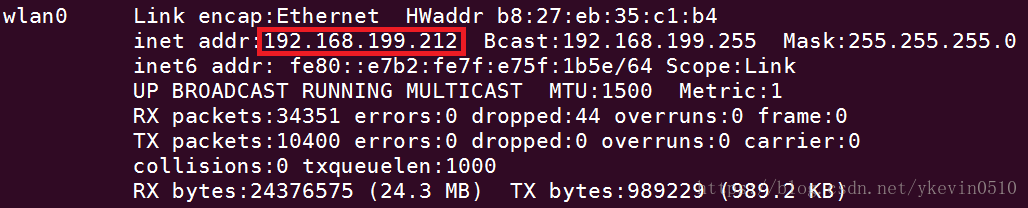
1、将主控上电,进入桌面,将主控端连接上网络,查看主控的IP,打开系统的一个终端,快捷键是“Ctrl+Alt+T”(同时按),查看的命令如下,然后出现下图,里面的“192.168.199.212”,就是主控当前的IP,这个因个人的网络环境不一样,是不同的,所以大家查看后请记住,这个IP,后面我们需要用到:
$ifconfig
2、 更改小车车型的配置,由于我们的小车的车型多面全,所以我们通过参数配置的方式来配置你当前用户的车型,如果用户拿到是两轮驱动、雷达是思岚A1,用户可以跳过这一步,同样在主控端打开一个终端,然后执行下面的命令并移动到文件底部(不会用vim的用户可以使用gedit,vim与gedit的使用请自已百度,请注意命令与命令之间要空格),
下面的RIKIBASE后面是车型指定,我们有“2wd(两驱动), 4wd(四驱动), mecanum(麦克纳母轮), omni(Omni全向轮), omni4wd(Omni全向四轮), tank(履带), ackermann(阿克曼(舵机转向))”:
里面的RIKILIDAR是指定雷达型号,我们车可以兼容多种雷达,也就是插上去就可以用了,不用在装驱动,里面可以兼容(思岚rplidar A1/A2, EAI的F4、X4、G4,砝石雷达),这个根据你的雷达型号来更改。
& vim ~/.bashrc

3、配置远程端的ROS网络,注意这是配置远程端,用户打开我们提供的虚拟机,如果用户没使用过虚拟机,具体操作可以看我们的视频,虚拟机在我们提供的资料里面“虚拟机使用软件及镜像”这个云盘目录,打开虚拟机并登录,检查虚拟机的网络是否连接上,如果不确认网络是否连接上,一样打开终端用ifconfig命令查看IP,确认虚拟机的IP是否与主控端在同一网络,然后打开终端,执行下面的命令,移动到文件底部,请将标红的地方的IP,也就是下面的“192.168.199.212”换成上面你主控端的IP,其它的地方不要在动,然后保存退出,重启系统:
$vim ~/.bashrc

准备远程控制小车
到上面配置完成后,ROS网络基本配置完成,只要保证是在局域网内,那么远程控制基本上就OK,接下来就是把车放在地下,或者架空上电测试,让Rikirobot机器人小车动起来。
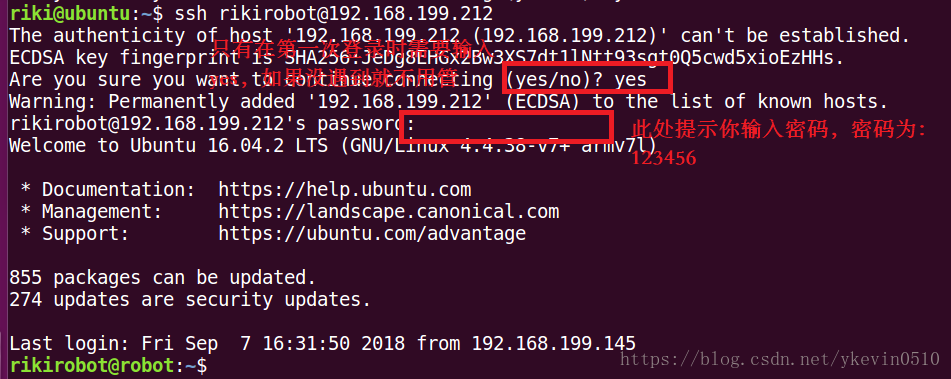
1.从远程端ssh远程登录到主控端,如果不了解决或者不会用ssh的用户请自已百度,请执行下面命令,将下面的ip换成你主控端的ip地址。
$ssh [email protected] (请将IP替换成自己主控端的IP)
然后会提示输入密码,密码是123456,有可能在第一次登录时,会提示你是否要登录,你输入”yes”后在输入密码
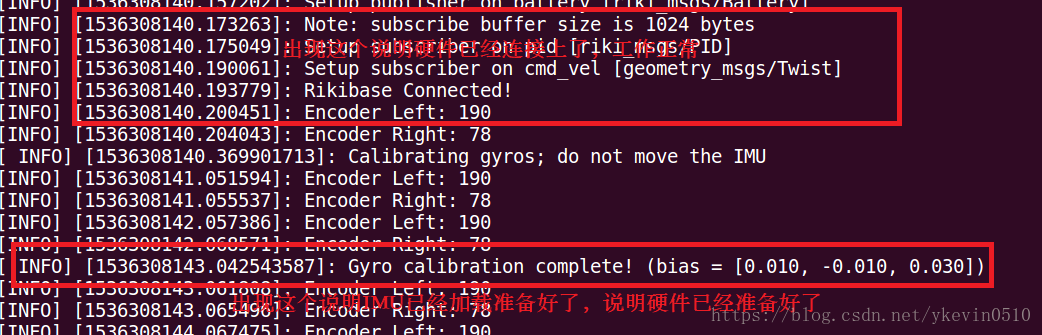
2.登录成功后,就可以启动小车,执行下面命令,请记住,只要是启动小车,每次必需登录到主控端执行这条命令,启动后出现下面的界面就是正常,如果出现启动异常,请参考后面的常见问题解决办法的内容:
$roslaunch rikirobot bringup.launch
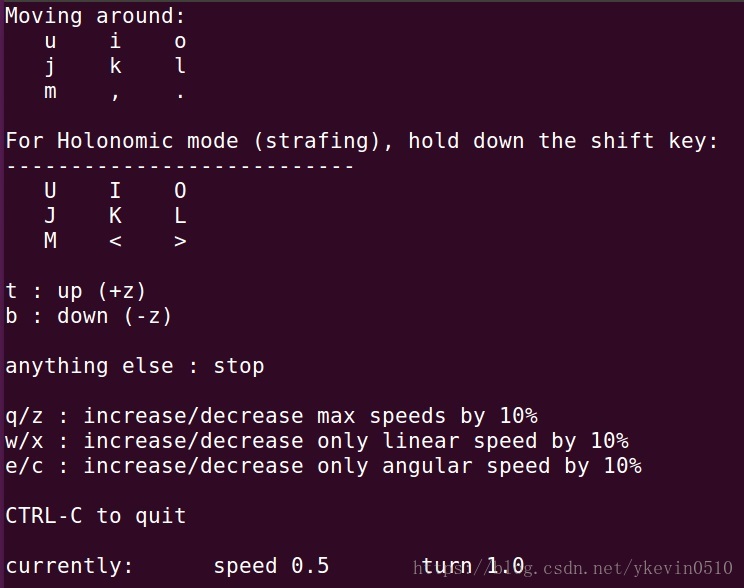
3.在远程端启动键盘控制,些条命令请在远程端执行也就是虚拟机侧执行,不用ssh过去,虽然ssh到主控端也可以控制,但如果你远程端不能控制小车,到时导航时,从远程端的图形界面发送导航指令,是不会成功的,启动键盘控制后会出现下面界面,你停留在此界面,然后按上面提示的字母就可以控制小车动了,上面”i”前进,”j”左旋转,”l”右旋转,其它的你可以自己尝试,对于全向轮、与麦克纳母轮用户,你可开启大写模式,然后就可以体验全向轮的的控制模型,就是可以横着走与对角走。
$rosrun teleop_twist_keyboard teleop_twist_keyboard.py
远程控制不成功的原因
1.ssh不成功,请检查两者网络是不连接好,是否在同一网段,能否ping通
2.ROS网络没有配置好,请检查网络是否满足上面要求
3.启动bringup后有没有成功,没成功请检查接线是否都安我们的组装视频接线
4.如果接线没有错误,还是启动不成功,请换一条能通信的USB线。
5.请检查电量是否充足
最后的最后
Rikirobot提供两驱动、四驱动、麦克纳姆轮、Omni全向三轮、Omni全向四轮、履带、阿克曼(舵机转向)、大型负载的各种ROS车,有配套指导、及完善售后。
QQ交流群:130486387
RIKIROBOT店铺连接
下面是店铺的二维码与Rikirobot的交流群,有兴趣的可以扫一扫。


