RGB-D object recognition and pose estimation based on pre-trained convolutional neural network features
最近发现将阅读论文的心得体会记录下来是很有必要的,一方面将自己的想法用文字表达出来,可以锻炼论文写作表达能力,便于后续论文写作。另一方面,便于回顾自己的工作。
本文仅代表我自己的观点,对论文理解有误的地方,欢迎大家指正。
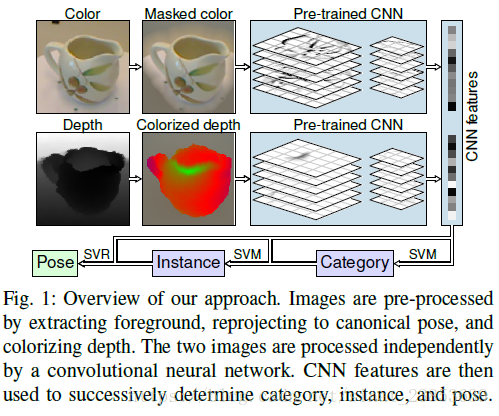
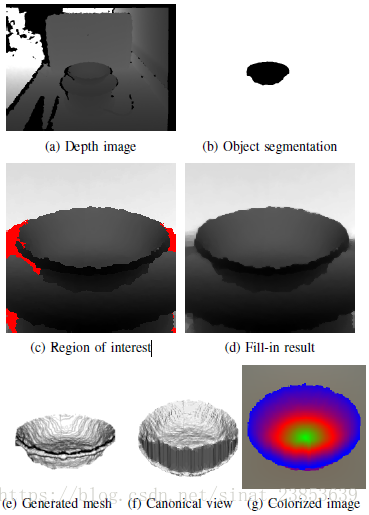
正如标题说是,本文是利用迁移学习技术将训练好的CNN模型应用于室内物体(household object)的识别及姿态评估任务。为了获得物体的姿态,并提高物体识别的精度,本文利用RGB-D信息训练神经网络。由于卷积神经网络(本文用的是A. Krizhevsky在ImageNet ILSVRC 2011上用的模型,A. Krizhevsky, I. Sutskever, and G. E. Hinton,“Imagenet classification with deep convolutional neural networks,” in Advancesin Neural Information Processing Systems (NIPS), 2012, pp. 1097–1105.)大部分是使用RGB图像进行训练,而深度图是用灰度图表示的,为了能将深度图作为输入,训练神经网络,作者用了一个技巧,首先从深度图中提取出需要识别的目标物体,然后对其上色,得到Colorized image,如下图所示。
然后作者根据卷积神经网络输出的结果,利用SVM(支持向量机)得到物体类别和姿态(这部分论文为详细阐述,故不太了解具体是怎么做的)。