Recognizing Objects in Range Data Using
Regional Point Descriptors
Andrea Frome 1 , Daniel Huber 2 Ravi Kolluri 1 , Thomas Bülow 1, and Jitendra Malik 1
1:University of California Berkeley, Berkeley CA 94530, USA,
{afrome,rkolluri,malik}@cs.berkeley.edu
[email protected]
2:Carnegie Mellon University, Pittsburgh PA 15213, USA, [email protected]
在噪声和杂乱的环境中识别3D物体在3D计算机视觉领域是具有挑战性的。挑战性来自于以下几点:
1. 在扫描时,许多目标对象被遮挡(自遮挡或被其它对象遮挡)。附近的物体造成了背景杂乱,干扰了识别过程。
2. 许多不同类别的目标物体在大小形状上比较接近。
3. 扫描仪具有有限的空间分辨率,物体表面被离散的点采样,导致丢失细节信息。
4. 高速扫描仪在距离测量中引入了噪声。
已有的一些方法中,全局特征描述子难以捕捉细节的细微变化,对物体遮挡敏感; 点特征比如表面曲率,则在噪声数据下不稳定。3D shape context 是介于两者之间的,称为局部(区域)描述子。
局部描述子表征围绕基点的邻域点集的属性,本文的3D shape context 则表征形状属性。理想情况下,描述子对物体的旋转平移等刚体变换是不变的,对噪声和杂乱环境是鲁棒的。
设计一个3D描述子时要考虑两点:1. 支持邻域的形状。2. 怎样把3D空间划分的小格子映射到直方图。
通过将支撑区域的“向上”或“北极”方向与基点处的表面法线的估计对齐来解决第二个问题,其沿着方位角留下一个自由度。
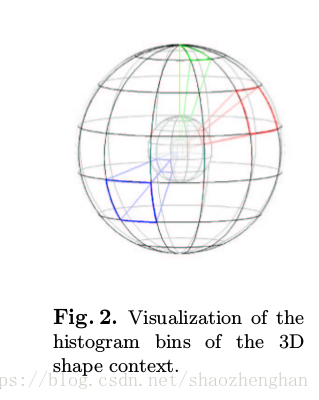
3D shape context 是 2D shape context (S. Belongie, J. Malik, and J. Puzicha. Shape matching and object recognition
using shape contexts. IEEE Trans. on Pattern Analysis and Machine Intelligence, 24(4):509–522, April 2002.)的直接扩展。3D形状上下文的支撑区域是以基点p为中心的球体,其北极以p的表面法线估计N为导向。支撑区域在方位角和仰角尺寸上由等间隔的边界分开,并且沿径向尺寸以对数间隔的边界分开。用R = {R0, ... Rj} 表示J + 1径向划分,K + 1高程划分为 Θ= {Θ0, ..., Θk},L + 1方位角为 Φ= {Φ0, ..., Φl}。 每个格子(bin)对应于J×K×L特征向量中的一个元素。R0 is the minimum radius r min , and Rj is the maximum radius r max .

对数方式的采样使得描述符对于与基点的距离的形状失真更加鲁棒。
靠近中心的箱子(bin)在所有三个球形尺寸中都较小,因此我们使用最小半径(r min> 0),以避免对非常接近中心的形状的微小差异过度敏感。
Θ和Φ的划分沿180度俯仰角和360度方位角范围是均匀分布的。
Bin(j, k, l) 累加权重w(pi)计数,对于每个点pi。 点pi 落在[R j , R j+1 ),[Φ k , Φ k+1 ),[Θ l , Θ l+1 )中。

V(j,k,l)是箱(bin)的体积,ρi是bin周围的局部点密度。
除以bin的体积进行标准化(Normalization)可以补偿掉bin 的尺寸的变化(由半径和俯仰角带来的)。
根据经验发现,使用体积的立方根保留了显著的判别力,同时使描述符对噪声具有鲁棒性,噪声导致点跨越bin的边界。
局部点密度ρi被估计为围绕点 pi 的半径为δ的球内的点数。该标准化考虑了由于表面的角度或到扫描仪的距离而导致的采样密度的变化。