常用的三种索引方式
Faiss 中有常用的三种索引方式:IndexFlatL2、IndexIVFFlat 和 IndexIVFPQ。
1.IndexFlatL2 - 暴力检索L2:
- 使用欧氏距离(L2)进行精确检索。
- 适用于较小规模的数据集,采用暴力检索的方式,即计算查询向量与所有数据库向量之间的距离,然后返回相似度最高的前 k 个向量。
import faiss
d = 200 # 向量维度
index = faiss.IndexFlatL2(d) # 构建索引
data = ... # 添加数据
index.add(data) # 添加数据到索引
k = 500 # 返回结果个数
query = ... # 查询向量
dis, ind = index.search(query, k) # 查询相似内容
2. IndexIVFFlat - 倒排索引,加速:
- 使用倒排索引结构,将数据集划分为多个聚类空间,以加速搜索。
- 在查询阶段,首先定位到可能包含相似向量的聚类中心,然后在该聚类中心附近进行精确搜索。
import faiss
d = 200 # 向量维度
nlist = 10000 # 聚类空间
k = 500 # 返回结果个数
quantizer = faiss.IndexFlatL2(d) # 量化器
index = faiss.IndexIVFFlat(quantizer, d, nlist) # 构建索引
index.nprobe = 20 # 查找聚类中心的个数
index.train(data) # 训练
index.add(data) # 添加数据到索引
dis, ind = index.search(query, k) # 查询相似内容
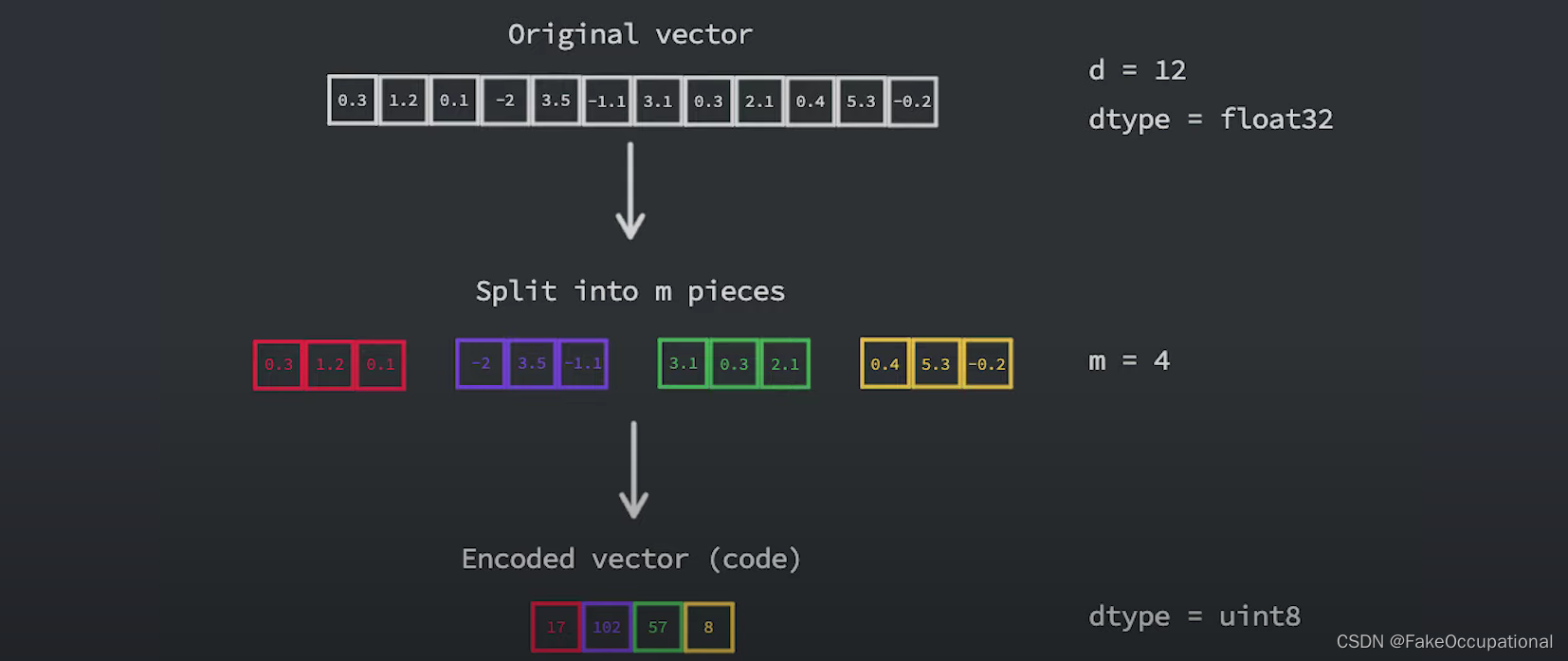
3. IndexIVFPQ - 省空间超快:
- 使用 Product Quantization(PQ)技术进行有损压缩,以节省内存。
- 在查询阶段,返回近似结果。
import faiss
d = 200 # 向量维度
m = 8 # 空间拆分
nlist = 10000 # 聚类空间
k = 500 # 返回结果个数
quantizer = faiss.IndexFlatL2(d)
index = faiss.IndexIVFPQ(quantizer, d, nlist, m, 8) # 每个向量用8 bits 编码
index.nprobe = 20 # 查找聚类中心的个数
index.train(data) # 训练
index.add(data) # 添加数据到索引
dis, ind = index.search(query, k) # 查询相似内容
// https://github1s.com/facebookresearch/faiss/blob/HEAD/tutorial/python/3-IVFPQ.py#L6-L32
import numpy as np
d = 64 # dimension
nb = 100000 # database size
nq = 10000 # nb of queries
np.random.seed(1234) # make reproducible
xb = np.random.random((nb, d)).astype('float32')
xb[:, 0] += np.arange(nb) / 1000.
xq = np.random.random((nq, d)).astype('float32')
xq[:, 0] += np.arange(nq) / 1000.
import faiss
nlist = 100
m = 8
k = 4
quantizer = faiss.IndexFlatL2(d) # this remains the same
index = faiss.IndexIVFPQ(quantizer, d, nlist, m, 8)
# 8 specifies that each sub-vector is encoded as 8 bits
index.train(xb)
index.add(xb)
D, I = index.search(xb[:5], k) # sanity check
print(I)
print(D)
index.nprobe = 10 # make comparable with experiment above
D, I = index.search(xq, k) # search
print(I[-5:])
这些索引方法在不同场景下有不同的优势,你可以根据数据集大小、内存限制和搜索速度的需求来选择适当的索引类型。
- Product quantization in Faiss and from scratch
- 乘积量化背后的主要思想是,将采用高维嵌入(其中每个元素都是浮点数)转换为更小的向量,其元素是无符号整数,具体位数通常是八位或一个字节。
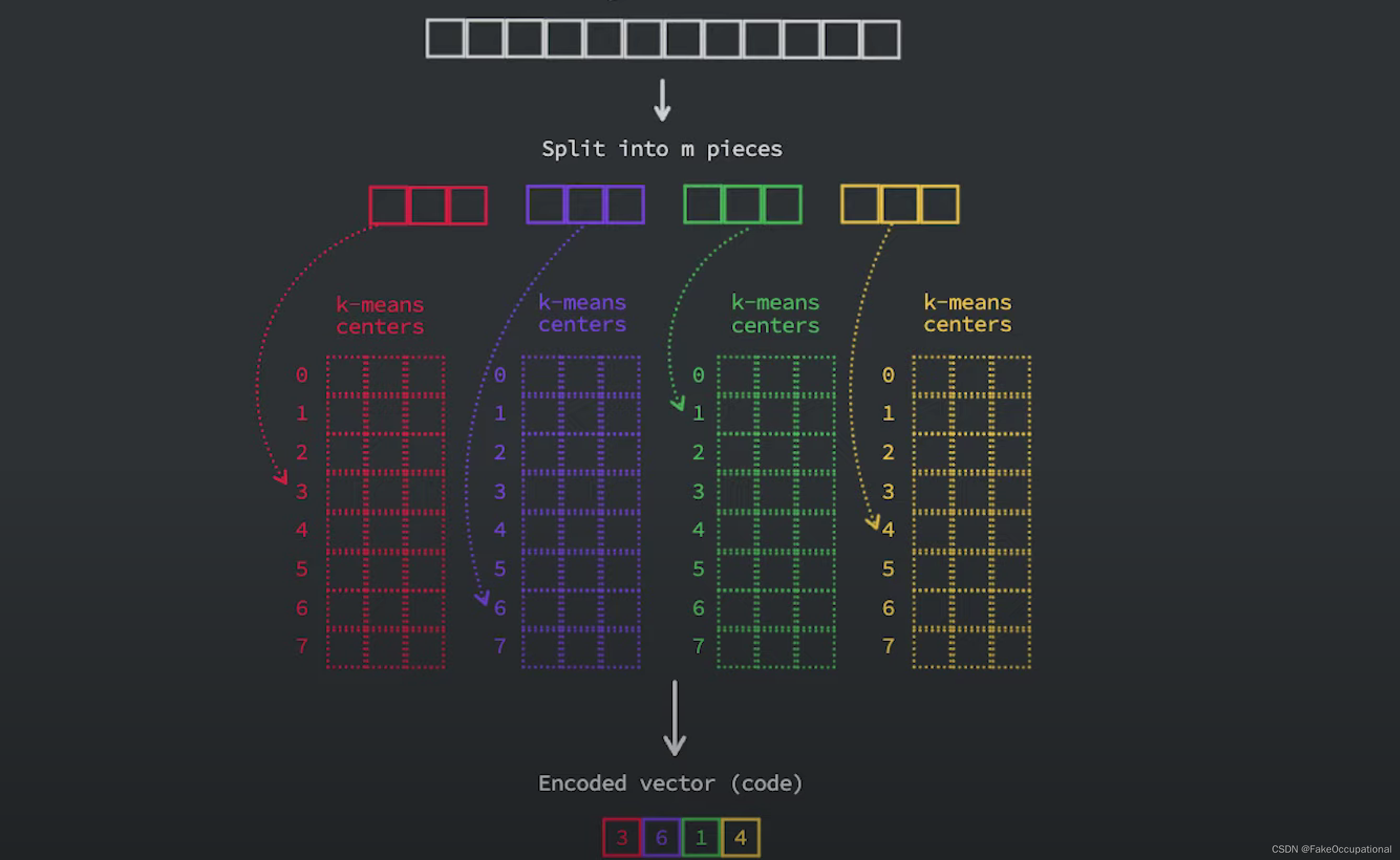
- 为了实现这一点,我们首先将向量分成 m 段,然后将每个段映射到某个固定整数。对于 m 个分段中的每个分段都有 m 个单独的估计器,如果我们假设这些估计器已经经过训练,我们可以简单地使用它们将给定分段分配给集群 id,并且该集群 id 是我们将用来表示的数字。
-
查询过程:
-
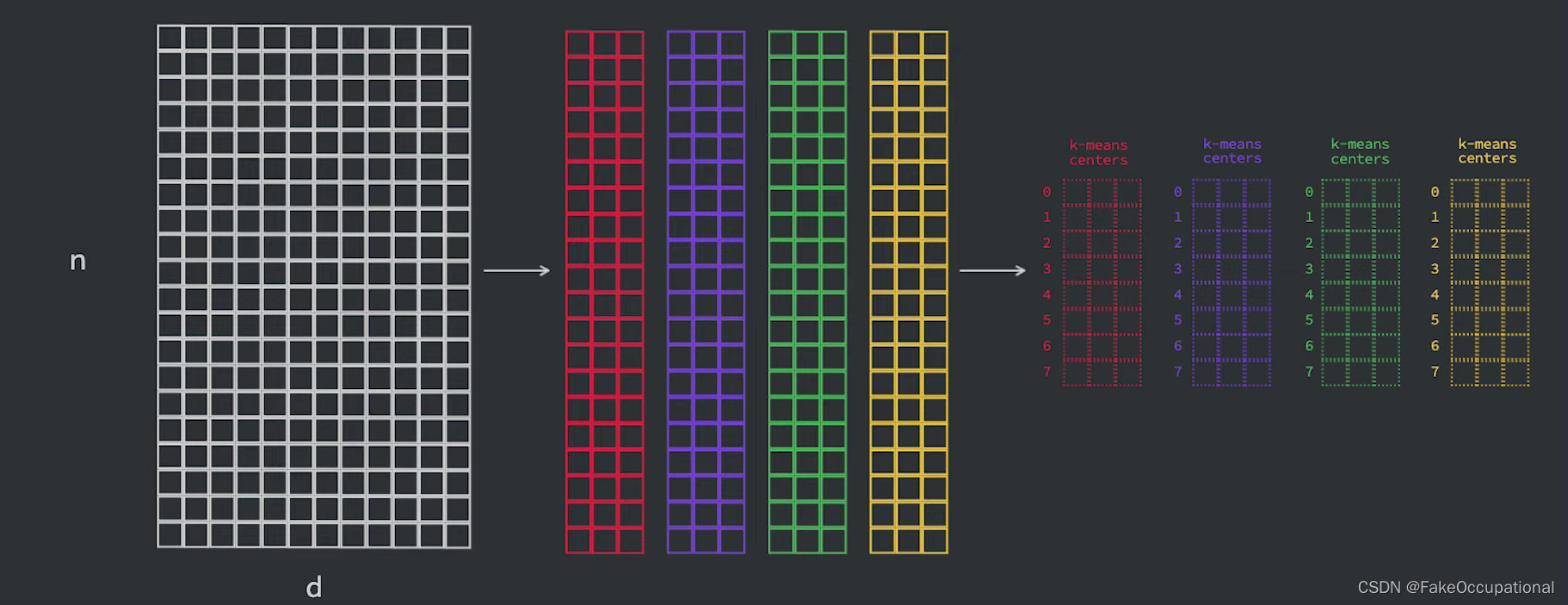
训练的过程:
保存和加载索引
faiss 提供了保存和加载索引的功能,可以将索引保存为文件以便后续重用。这对于避免重新构建索引,以及在不同的程序之间共享索引非常有用。
import faiss
import numpy as np
# 创建一些随机数据
np.random.seed(42)
data = np.random.rand(10, 5).astype('float32')
# 创建一个平面索引
index = faiss.IndexFlatL2(5)
index.add(data)
# 保存索引到文件
faiss.write_index(index, "my_index.index")
import faiss
import numpy as np
# 加载索引
loaded_index = faiss.read_index("my_index.index")
# 进行相似性搜索
query_vector = np.random.rand(1, 5).astype('float32')
k = 3
D, I = loaded_index.search(query_vector, k)
print("相似度最高的{}个向量的索引: {}".format(k, I))
print("对应的相似度分数: {}".format(D))
清空一个index中的所有数据
import faiss
# 假设你已经创建了一个索引 index
# 这里以 IndexFlatL2 为例,具体类型根据你的实际情况选择
index = faiss.IndexFlatL2(d=128)
# 添加一些数据到索引中
data_to_add = [...] # 你的数据
index.add(data_to_add)
# 打印添加数据前的索引大小
print("索引大小 (添加数据前):", index.ntotal)
# 清空索引中的所有数据
index.reset()
# 打印清空数据后的索引大小
print("索引大小 (清空数据后):", index.ntotal)
merge
merge_from实现(python)
# 这个例子好像有问题
import faiss
# 创建两个示例 IndexIVFPQ 索引
dimension = 64
nlist = 100
nprobe = 32
code_size = 8
# 进行相似性搜索的设置
query_vector = faiss.rand((1, dimension)).astype('float32')
k = 3
quantizer = faiss.IndexFlatL2(dimension)
index1 = faiss.IndexIVFPQ(quantizer, dimension, nlist, nprobe, 8) # 每个向量用8 bits 编码
index2 = faiss.IndexIVFPQ(quantizer, dimension, nlist, nprobe, 8) # 每个向量用8 bits 编码
# 向索引添加一些示例数据
data1 = faiss.rand((10000, dimension)).astype('float32')
data2 = faiss.rand((50000, dimension)).astype('float32')
index1.train(data1)
index1.add(data1)
D, I = index1.search(query_vector, k)
print("index1:相似度最高的{}个向量的索引: {}".format(k, I))
print("index1:对应的相似度分数: {}".format(D))
# print("Retrieved Vectors:", data1[I[0]])
index2.train(data2)
index2.add(data2)
D, I = index2.search(query_vector, k)
print("index2:相似度最高的{}个向量的索引: {}".format(k, I))
print("index2:对应的相似度分数: {}".format(D))
# print("Retrieved Vectors:", data2[I[0]])
# 打印每个索引的总数
print("Index 1 total:", index1.ntotal)
print("Index 2 total:", index2.ntotal)
# 创建一个新的索引,然后将两个索引合并到新的索引中
merged_index = faiss.IndexIVFPQ(quantizer, dimension, nlist, nprobe, 8)
merged_index.merge_from(index1,add_id=True)
merged_index.merge_from(index2,add_id=True)
# 打印合并后的总数
print("Merged Index total:", index1.ntotal)
print("Merged Index total:", index1.ntotal)
print("Merged Index total:", merged_index.ntotal)
D, I = merged_index.search(query_vector, k)
print("merged_index合并后:相似度最高的{}个向量的索引: {}".format(k, I))
print("merged_index合并后:对应的相似度分数: {}".format(D))
# index1:相似度最高的3个向量的索引: [[ 0 4722 8480]]
# index1:对应的相似度分数: [[0.02087733 6.411026 7.01804 ]]
# index2:相似度最高的3个向量的索引: [[ 0 512 33625]]
# index2:对应的相似度分数: [[0.02118337 5.254285 5.6290326 ]]
# Index 1 total: 10000
# Index 2 total: 50000
# Merged Index total: 0
# Merged Index total: 0
# Merged Index total: 60000
# merged_index合并后:相似度最高的3个向量的索引: [[63 70 1]]
# merged_index合并后:对应的相似度分数: [[4.093991 4.093991 4.093991]]
- merge_from遍历 PDF 列表。首次创建 Faiss 索引,然后合并其余索引。
// https://stackoverflow.com/questions/76421045/how-to-combine-multiple-faiss-indexes-into-one-to-get-a-single-retriever
pdfs = [help_doc_name, newsletters_doc_name, supportCases_doc_name]
for index, pdf in enumerate(pdfs):
content = load_pdf(pdf)
if index == 0:
faiss_index = FAISS.from_documents(content, OpenAIEmbeddings())
else:
faiss_index_i = FAISS.from_documents(content, OpenAIEmbeddings())
faiss_index.merge_from(faiss_index_i)
faiss_index.save_local(index_path)
retriever = faiss_index.as_retriever(
search_type="similarity", search_kwargs={
"k": 3}
)
qa_chain = RetrievalQA.from_chain_type(
llm=llm,
chain_type="stuff",
retriever=retriever,
verbose=False
)
另一种实现方式(python)
// https://gist.github.com/mdouze/586746666ef493dbc363aef9266bb990
import numpy as np
import faiss
def merge_idmap_flat(a, b):
a_flat = faiss.downcast_index(a.index)
b_flat = faiss.downcast_index(b.index)
ab_flat = faiss.IndexFlatL2(a.d)
faiss.copy_array_to_vector(
np.hstack((
faiss.vector_to_array(a_flat.xb),
faiss.vector_to_array(b_flat.xb)
)),
ab_flat.xb
)
ab = faiss.IndexIDMap(ab_flat)
ab.referenced = ab_flat # avoid deallocation, not needed in 1.4.0
faiss.copy_array_to_vector(
np.hstack((
faiss.vector_to_array(a.id_map),
faiss.vector_to_array(b.id_map)
)),
ab.id_map
)
ab_flat.ntotal = ab.ntotal = a.ntotal + b.ntotal
return ab
code实现(官方库的代码实现逻辑)
-
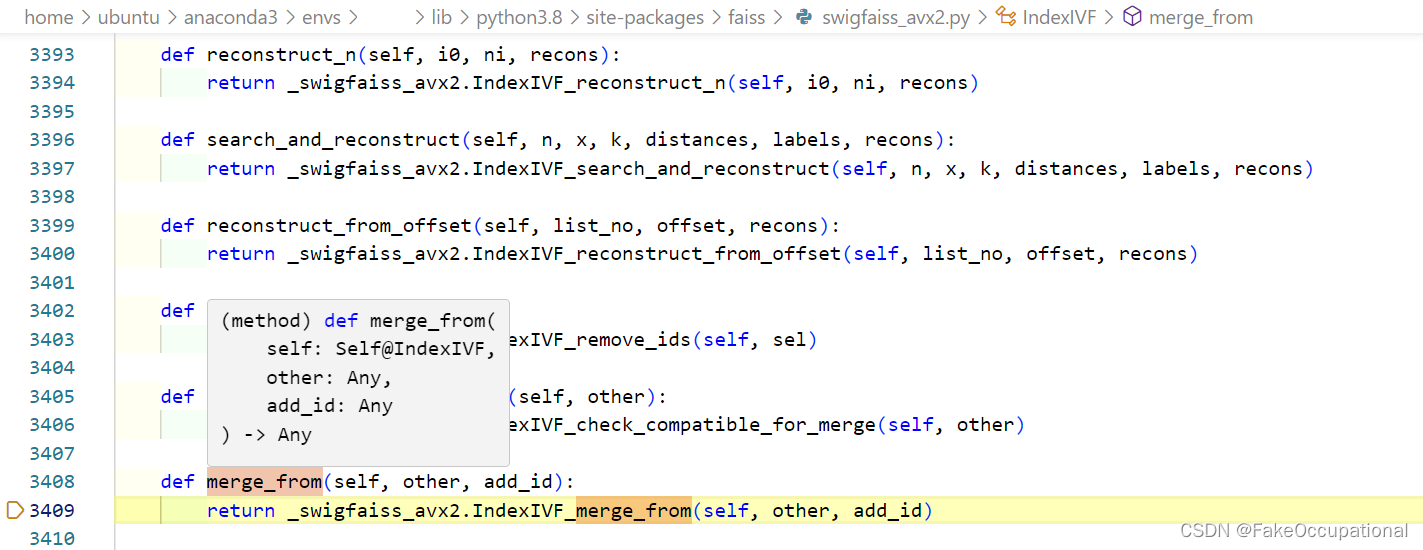
使用python定位到最深的实现为IndexIVF类的merge_from方法。这个函数很可能是 faiss 库中的底层实现,通过 swig 工具将 C/C++ 代码包装成 Python 接口。
-
再TEST宏处进入测试
#include <gtest/gtest.h> // https://github1s.com/facebookresearch/faiss/blob/HEAD/tests/test_merge.cpp#L14
// now use ondisk specific merge https://github1s.com/facebookresearch/faiss/blob/HEAD/tests/test_merge.cpp#L234-L247
TEST(MERGE, merge_flat_ondisk_2) {
faiss::IndexShards index_shards(d, false, false);
index_shards.own_indices = true;
for (int i = 0; i < nindex; i++) {
index_shards.add_shard(
new faiss::IndexIVFFlat(&cd.quantizer, d, nlist));
}
EXPECT_TRUE(index_shards.is_trained);
index_shards.add_with_ids(nb, cd.database.data(), cd.ids.data());
int ndiff = compare_merged(&index_shards, false, false);
EXPECT_GE(0, ndiff);
}
- 调用compare_merged
// https://github1s.com/facebookresearch/faiss/blob/HEAD/tests/test_merge.cpp#L88-L144
/// perform a search on shards, then merge and search again and
/// compare results.
// 定义一个函数,用于在索引分片上进行搜索,合并索引,再次搜索,并比较结果。
int compare_merged(
faiss::IndexShards* index_shards,
bool shift_ids,
bool standard_merge = true) {
// 定义用于存储搜索结果的数组
std::vector<idx_t> refI(k * nq);
std::vector<float> refD(k * nq);
// 在索引分片上执行搜索操作,将结果存储在 refD 和 refI 数组中
index_shards->search(nq, cd.queries.data(), k, refD.data(), refI.data());
Tempfilename filename;// 创建一个临时文件名对象
// 定义新的搜索结果数组
std::vector<idx_t> newI(k * nq);
std::vector<float> newD(k * nq);
// 根据 standard_merge 的值,选择标准合并方式还是非标准合并方式
if (standard_merge) {
// 标准合并方式
for (int i = 1; i < nindex; i++) {
faiss::ivflib::merge_into(// 将所有索引分片合并到第一个分片中
index_shards->at(0), index_shards->at(i), shift_ids);
}
// 同步索引以确保合并的变化得以反映
index_shards->syncWithSubIndexes();
} else {
// 非标准合并方式
std::vector<const faiss::InvertedLists*> lists;
faiss::IndexIVF* index0 = nullptr;
size_t ntotal = 0;
// 收集所有分片的倒排列表
for (int i = 0; i < nindex; i++) {
auto index_ivf =
dynamic_cast<faiss::IndexIVF*>(index_shards->at(i));
assert(index_ivf);
if (i == 0) {
index0 = index_ivf;
}
lists.push_back(index_ivf->invlists);
ntotal += index_ivf->ntotal;
}
// 创建一个新的 OnDiskInvertedLists,并将所有倒排列表合并到其中
auto il = new faiss::OnDiskInvertedLists(
index0->nlist, index0->code_size, filename.c_str());
il->merge_from(lists.data(), lists.size());
// 替换第一个分片的倒排列表
index0->replace_invlists(il, true);
index0->ntotal = ntotal;
}
// 仅在第一个索引分片上执行搜索操作
index_shards->at(0)->search(
nq, cd.queries.data(), k, newD.data(), newI.data());
// 比较搜索结果,计算不同的数量
size_t ndiff = 0;
for (size_t i = 0; i < k * nq; i++) {
if (refI[i] != newI[i]) {
ndiff++;
}
}
// 返回不同的数量
return ndiff;
}
void merge_into(faiss::Index* index0, faiss::Index* index1, bool shift_ids) {
// 检查两个索引是否兼容,如果不兼容将引发异常
check_compatible_for_merge(index0, index1);
// 将传入的索引强制转换为 IndexIVF 类型
IndexIVF* ivf0 = extract_index_ivf(index0);
IndexIVF* ivf1 = extract_index_ivf(index1);
// 调用 IndexIVF 类的 merge_from 方法,将 index1 合并到 index0
ivf0->merge_from(*ivf1, shift_ids ? ivf0->ntotal : 0);
// 对于 IndexPreTransform 等情况,更新索引总数
index0->ntotal = ivf0->ntotal;
index1->ntotal = ivf1->ntotal;
}
- IndexIVF 的类型定义如下,它继承自两个类:Index 和 IndexIVFInterface。第396行为函数声明:
virtual void merge_from(Index& otherIndex, idx_t add_id) override;,它的实际实现是通过
/** Index based on a inverted file (IVF)
*
* In the inverted file, the quantizer (an Index instance) provides a
* quantization index for each vector to be added. The quantization
* index maps to a list (aka inverted list or posting list), where the
* id of the vector is stored.
*
* The inverted list object is required only after trainng. If none is
* set externally, an ArrayInvertedLists is used automatically.
*
* At search time, the vector to be searched is also quantized, and
* only the list corresponding to the quantization index is
* searched. This speeds up the search by making it
* non-exhaustive. This can be relaxed using multi-probe search: a few
* (nprobe) quantization indices are selected and several inverted
* lists are visited.
*
* Sub-classes implement a post-filtering of the index that refines
* the distance estimation from the query to databse vectors.
*/
struct IndexIVF : Index, IndexIVFInterface {
/// Access to the actual data
InvertedLists* invlists = nullptr; // #include <faiss/invlists/InvertedLists.h>
bool own_invlists = false;
size_t code_size = 0; ///< code size per vector in bytes
/** Parallel mode determines how queries are parallelized with OpenMP
*
* 0 (default): split over queries
* 1: parallelize over inverted lists
* 2: parallelize over both
* 3: split over queries with a finer granularity
*
* PARALLEL_MODE_NO_HEAP_INIT: binary or with the previous to
* prevent the heap to be initialized and finalized
*/
int parallel_mode = 0;
const int PARALLEL_MODE_NO_HEAP_INIT = 1024;
/** optional map that maps back ids to invlist entries. This
* enables reconstruct() */
DirectMap direct_map;
/// do the codes in the invlists encode the vectors relative to the
/// centroids?
bool by_residual = true;
/** The Inverted file takes a quantizer (an Index) on input,
* which implements the function mapping a vector to a list
* identifier.
*/
IndexIVF(
Index* quantizer,
size_t d,
size_t nlist,
size_t code_size,
MetricType metric = METRIC_L2);
void reset() override;
/// Trains the quantizer and calls train_encoder to train sub-quantizers
void train(idx_t n, const float* x) override;
/// Calls add_with_ids with NULL ids
void add(idx_t n, const float* x) override;
/// default implementation that calls encode_vectors
void add_with_ids(idx_t n, const float* x, const idx_t* xids) override;
/** Implementation of vector addition where the vector assignments are
* predefined. The default implementation hands over the code extraction to
* encode_vectors.
*
* @param precomputed_idx quantization indices for the input vectors
* (size n)
*/
virtual void add_core(
idx_t n,
const float* x,
const idx_t* xids,
const idx_t* precomputed_idx);
/** Encodes a set of vectors as they would appear in the inverted lists
*
* @param list_nos inverted list ids as returned by the
* quantizer (size n). -1s are ignored.
* @param codes output codes, size n * code_size
* @param include_listno
* include the list ids in the code (in this case add
* ceil(log8(nlist)) to the code size)
*/
virtual void encode_vectors(
idx_t n,
const float* x,
const idx_t* list_nos,
uint8_t* codes,
bool include_listno = false) const = 0;
/** Add vectors that are computed with the standalone codec
*
* @param codes codes to add size n * sa_code_size()
* @param xids corresponding ids, size n
*/
void add_sa_codes(idx_t n, const uint8_t* codes, const idx_t* xids);
/** Train the encoder for the vectors.
*
* If by_residual then it is called with residuals and corresponding assign
* array, otherwise x is the raw training vectors and assign=nullptr */
virtual void train_encoder(idx_t n, const float* x, const idx_t* assign);
/// can be redefined by subclasses to indicate how many training vectors
/// they need
virtual idx_t train_encoder_num_vectors() const;
void search_preassigned(
idx_t n,
const float* x,
idx_t k,
const idx_t* assign,
const float* centroid_dis,
float* distances,
idx_t* labels,
bool store_pairs,
const IVFSearchParameters* params = nullptr,
IndexIVFStats* stats = nullptr) const override;
void range_search_preassigned(
idx_t nx,
const float* x,
float radius,
const idx_t* keys,
const float* coarse_dis,
RangeSearchResult* result,
bool store_pairs = false,
const IVFSearchParameters* params = nullptr,
IndexIVFStats* stats = nullptr) const override;
/** assign the vectors, then call search_preassign */
void search(
idx_t n,
const float* x,
idx_t k,
float* distances,
idx_t* labels,
const SearchParameters* params = nullptr) const override;
void range_search(
idx_t n,
const float* x,
float radius,
RangeSearchResult* result,
const SearchParameters* params = nullptr) const override;
/** Get a scanner for this index (store_pairs means ignore labels)
*
* The default search implementation uses this to compute the distances
*/
virtual InvertedListScanner* get_InvertedListScanner(
bool store_pairs = false,
const IDSelector* sel = nullptr) const;
/** reconstruct a vector. Works only if maintain_direct_map is set to 1 or 2
*/
void reconstruct(idx_t key, float* recons) const override;
/** Update a subset of vectors.
*
* The index must have a direct_map
*
* @param nv nb of vectors to update
* @param idx vector indices to update, size nv
* @param v vectors of new values, size nv*d
*/
virtual void update_vectors(int nv, const idx_t* idx, const float* v);
/** Reconstruct a subset of the indexed vectors.
*
* Overrides default implementation to bypass reconstruct() which requires
* direct_map to be maintained.
*
* @param i0 first vector to reconstruct
* @param ni nb of vectors to reconstruct
* @param recons output array of reconstructed vectors, size ni * d
*/
void reconstruct_n(idx_t i0, idx_t ni, float* recons) const override;
/** Similar to search, but also reconstructs the stored vectors (or an
* approximation in the case of lossy coding) for the search results.
*
* Overrides default implementation to avoid having to maintain direct_map
* and instead fetch the code offsets through the `store_pairs` flag in
* search_preassigned().
*
* @param recons reconstructed vectors size (n, k, d)
*/
void search_and_reconstruct(
idx_t n,
const float* x,
idx_t k,
float* distances,
idx_t* labels,
float* recons,
const SearchParameters* params = nullptr) const override;
/** Similar to search, but also returns the codes corresponding to the
* stored vectors for the search results.
*
* @param codes codes (n, k, code_size)
* @param include_listno
* include the list ids in the code (in this case add
* ceil(log8(nlist)) to the code size)
*/
void search_and_return_codes(
idx_t n,
const float* x,
idx_t k,
float* distances,
idx_t* labels,
uint8_t* recons,
bool include_listno = false,
const SearchParameters* params = nullptr) const;
/** Reconstruct a vector given the location in terms of (inv list index +
* inv list offset) instead of the id.
*
* Useful for reconstructing when the direct_map is not maintained and
* the inv list offset is computed by search_preassigned() with
* `store_pairs` set.
*/
virtual void reconstruct_from_offset(
int64_t list_no,
int64_t offset,
float* recons) const;
/// Dataset manipulation functions
size_t remove_ids(const IDSelector& sel) override;
void check_compatible_for_merge(const Index& otherIndex) const override;
virtual void merge_from(Index& otherIndex, idx_t add_id) override;
// returns a new instance of a CodePacker
virtual CodePacker* get_CodePacker() const;
/** copy a subset of the entries index to the other index
* see Invlists::copy_subset_to for the meaning of subset_type
*/
virtual void copy_subset_to(
IndexIVF& other,
InvertedLists::subset_type_t subset_type,
idx_t a1,
idx_t a2) const;
~IndexIVF() override;
size_t get_list_size(size_t list_no) const {
return invlists->list_size(list_no);
}
/// are the ids sorted?
bool check_ids_sorted() const;
/** initialize a direct map
*
* @param new_maintain_direct_map if true, create a direct map,
* else clear it
*/
void make_direct_map(bool new_maintain_direct_map = true);
void set_direct_map_type(DirectMap::Type type);
/// replace the inverted lists, old one is deallocated if own_invlists
void replace_invlists(InvertedLists* il, bool own = false);
/* The standalone codec interface (except sa_decode that is specific) */
size_t sa_code_size() const override;
void sa_encode(idx_t n, const float* x, uint8_t* bytes) const override;
IndexIVF();
};
merge_from的最终实现
// https://github1s.com/facebookresearch/faiss/blob/HEAD/faiss/invlists/OnDiskInvertedLists.cpp#L569-L636
// 从一组倒排列表中合并数据到当前 OnDiskInvertedLists 对象
size_t OnDiskInvertedLists::merge_from(
const InvertedLists** ils,
int n_il,
bool verbose) {
// 确保当前 InvertedLists 对象为空
FAISS_THROW_IF_NOT_MSG(
totsize == 0, "works only on an empty InvertedLists");
// 记录每个倒排列表的大小
std::vector<size_t> sizes(nlist);
// 遍历所有输入的倒排列表
for (int i = 0; i < n_il; i++) {
const InvertedLists* il = ils[i];
// 确保倒排列表的维度和码的大小与当前对象一致
FAISS_THROW_IF_NOT(il->nlist == nlist && il->code_size == code_size);
// 统计每个列表的大小
for (size_t j = 0; j < nlist; j++) {
sizes[j] += il->list_size(j);
}
}
size_t cums = 0;
size_t ntotal = 0;
// 根据统计的列表大小更新当前对象的结构
for (size_t j = 0; j < nlist; j++) {
ntotal += sizes[j];
lists[j].size = 0;
lists[j].capacity = sizes[j];
lists[j].offset = cums;
cums += lists[j].capacity * (sizeof(idx_t) + code_size);
}
// 更新当前对象的总大小
update_totsize(cums);
size_t nmerged = 0;
double t0 = getmillisecs(), last_t = t0;
// 并行处理每个列表
#pragma omp parallel for // OpenMP在循环中实现并行化的预编译关键字(Preprocessor Directives),表示在其后的 for 循环应该在多个线程中并行执行
for (size_t j = 0; j < nlist; j++) {
List& l = lists[j];
// 遍历所有输入的倒排列表
for (int i = 0; i < n_il; i++) {
const InvertedLists* il = ils[i];
// 获取当前列表在输入倒排列表中的条目数
size_t n_entry = il->list_size(j);
// 更新当前列表的大小和内容
l.size += n_entry;
update_entries(
j,
l.size - n_entry,
n_entry,
ScopedIds(il, j).get(),//根据https://github1s.com/facebookresearch/faiss/blob/HEAD/faiss/invlists/InvertedLists.h#L165-L205的定义看,应该是指向倒排表的指针
ScopedCodes(il, j).get());
}
// 确保当前列表的大小与容量相等
assert(l.size == l.capacity);
// 在 verbose 模式下,输出合并的进度信息
if (verbose) {
#pragma omp critical
{
nmerged++;
double t1 = getmillisecs();
if (t1 - last_t > 500) {
printf("merged %zd lists in %.3f s\r",
nmerged,
(t1 - t0) / 1000.0);
fflush(stdout);
last_t = t1;
}
}
}
}
// 输出合并完成的信息
if (verbose) {
printf("\n");
}
// 返回合并后的总条目数
return ntotal;
}
最终的更新实现
void OnDiskInvertedLists::update_entries(
size_t list_no, // 表示要更新的倒排列表的编号。
size_t offset, // 表示要更新的列表中的起始位置。
size_t n_entry,// 表示要更新的条目数。
const idx_t* ids_in, // 表示输入的新 ids 数组的指针。
const uint8_t* codes_in) {
// 表示输入的新 codes 数组的指针。
// 检查是否为只读状态,如果是,抛出异常
FAISS_THROW_IF_NOT(!read_only);
// 如果要更新的条目数为 0,则直接返回
if (n_entry == 0)
return;
// 获取当前列表的引用
const List& l = lists[list_no];
// 确保更新的范围在合理的范围内
assert(n_entry + offset <= l.size);
// 获取当前列表的 ids 数组的指针
idx_t* ids = const_cast<idx_t*>(get_ids(list_no));
// 将输入的 ids_in 复制到列表的相应位置
memcpy(ids + offset, ids_in, sizeof(ids_in[0]) * n_entry);
// 获取当前列表的 codes 数组的指针
uint8_t* codes = const_cast<uint8_t*>(get_codes(list_no));
// 将输入的 codes_in 复制到列表的相应位置
memcpy(codes + offset * code_size, codes_in, code_size * n_entry);
}
更多功能
https://github1s.com/facebookresearch/faiss-main/tests$ ls
CMakeLists.txt test_binary_io.py test_cppcontrib_sa_decode.cpp test_factory.py test_index_binary.py test_local_search_quantizer.py test_omp_threads_py.py test_pq_encoding.cpp test_search_params.py
common_faiss_tests.py test_build_blocks.py test_cppcontrib_uintreader.cpp test_fast_scan_ivf.py test_index_composite.py test_lowlevel_ivf.cpp test_ondisk_ivf.cpp test_product_quantizer.py test_simdlib.cpp
test_approx_topk.cpp test_clone.py test_dealloc_invlists.cpp test_fast_scan.py test_index.py test_mem_leak.cpp test_oom_exception.py test_RCQ_cropping.cpp test_sliding_ivf.cpp
test_autotune.py test_clustering.py test_distances_simd.cpp test_heap.cpp test_io.py test_merge.cpp test_pairs_decoding.cpp test_referenced_objects.py test_standalone_codec.py
test_binary_factory.py test_code_distance.cpp test_documentation.py test_hnsw.cpp test_ivflib.py test_merge_index.py test_params_override.cpp test_refine.py test_threaded_index.cpp
test_binary_flat.cpp test_contrib.py test_doxygen_documentation.py test_index_accuracy.py test_ivfpq_codec.cpp test_meta_index.py test_partitioning.cpp test_residual_quantizer.py test_transfer_invlists.cpp
test_binary_hashindex.py test_contrib_with_scipy.py test_extra_distances.py test_index_binary_from_float.py test_ivfpq_indexing.cpp test_omp_threads.cpp test_partition.py test_rowwise_minmax.py torch_test_contrib.py
缺点
- 不支持动态更新:FAISS构建的索引不支持动态添加、删除和更新向量。如果数据发生改变,通常需要重新构建整个索引。
- 不支持分布式存储和查询(有第三方库实现)
- 单机可能出现内存不足问题:
Traceback (most recent call last):
File "*****.py", line 199, in <module>
main()
File "*****.py", line 93, in main
train(config, train_loader, model, losses, optimizer, 0, logger)
File "*****.py", line 164, in train
index.add(image_embeds.view(1,-1).detach().cpu().numpy())
File "/home/ubuntu/anaconda3/envs/***/lib/python3.8/site-packages/faiss/__init__.py", line 194, in replacement_add
self.add_c(n, swig_ptr(x))
File "/home/ubuntu/anaconda3/envs/***/lib/python3.8/site-packages/faiss/swigfaiss_avx2.py", line 2166, in add
return _swigfaiss_avx2.IndexFlat_add(self, n, x)
MemoryError: std::bad_alloc