目录
1.算法仿真效果
matlab2022a仿真结果如下:
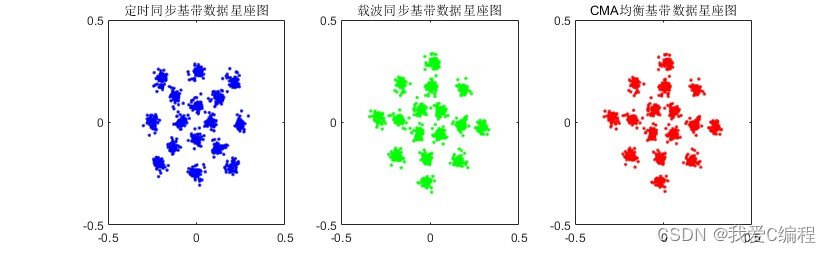
锁定过程的星座图变化情况:


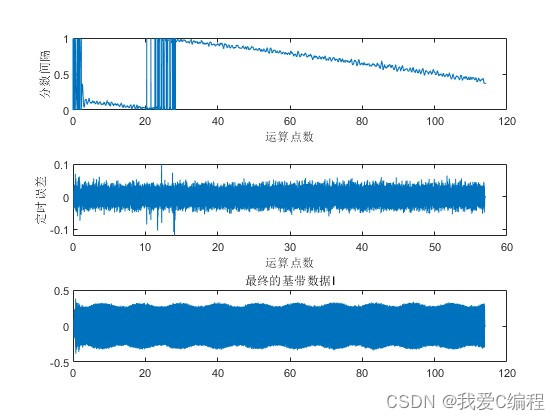
定时收敛曲线:
载波同步收敛曲线:

2.算法涉及理论知识概要
基于16QAM(Quadrature Amplitude Modulation)调制的音频信号同步接收器是一个复杂但高效的通信系统。该系统主要涉及三个关键部分:Gardner符号同步、载波同步以及CMA(Constant Modulus Algorithm)均衡。
1. Gardner符号同步
Gardner符号同步是一个用于数字通信系统的相位和频率同步的算法,它是在数据符号级别上工作的。这个算法通过一个特殊的滤波器(Gardner或Dragone滤波器)来估计并跟踪接收信号的相位和频率。这个滤波器尝试最小化接收信号和理想信号之间的差异,从而提供一个准确的相位和频率估计。
Gardner定时误差算法通常用在BPSK、QPSK信号,通过改进可以应用在QAM等多进制基带信号中。Gardner定时误差算法,该算法的一个特点是每个符号只需要使用两个采样点,一个是strobe点,即最佳观察点,另外一个是midstrobe点,即两个观察点之间的采样点。Gardener环中的数控振荡器与锁相环路中的NCO功能完全不同,这里的NCO作用是产生时钟,即确定内插基点mk,同时完成分数间隔uk的计算,以提供给内插器进行内插。
位同步环路中的数控振荡器(NCO)是一个相位递减器,它的差分方程为:
η(m+1)=[η(m)-ω(m)]mod1
式中,η(m)是第m个工作时钟NCO寄存器的内容,ω(m)为NCO的控制字,两者都是正小数。NCO的工作周期是T s(采样周期),内插器的周期为T i,ω(m)由环路滤波器进行调节,使NCO在最佳采样时刻溢出。
2. 载波同步
载波同步是用于从接收到的信号中提取相位和频率信息的部分。它主要用于消除接收信号中可能存在的载波偏差。这种偏差可能由发射和接收设备的频率不同步或者多径效应引起。 Costas环(Costas Loop)用在抑制载波调制信号(比如双边带抑制载波调制)和相位调制信号(BPSK、QPSK)的相干解调中的载波恢复(carrier frequency recovery)上。Costas环的主要应用是在无线通信接收机中。与基于PLL的检波器相比,它的优势在于,在相位差比较小的情况下,Costas环输出的误差电压为 sin(2(θi−θf)) ,而基于PLL的检波器输出的误差电压为 sin(θi−θf) ,这不仅使灵敏度提高了一倍,而且使Costas环路特别适合跟踪载波的多普勒频移,特别是在OFDM和GPS接收机中。
3. CMA均衡
CMA(Constant Modulus Algorithm)均衡是一种常用于数字通信系统的盲信号处理技术。它主要用于消除多径干扰和通道失真。CMA均衡器通过调整其权重来最小化输出信号的模值偏差。这意味着它会尝试将接收到的信号调整到接近理想的信号形状。
基于16QAM调制的音频信号同步接收器将上述三个部分结合在一起,通过处理接收到的信号实现同步解调和均衡处理,从而恢复出原始信号。
3.MATLAB核心程序
........................................................................
%gardner算法开始
%gardner算法开始
len=length(out);
K=4; %每 个符号采4个样点
Ns=len; %总的采样点数
N=floor(Ns/K);%符号数
i=4; %用来表示Ts的时间序号,指示n,n_temp,nco,
k=1; %用来表示Ti时间序号,指示u,yI,yQ
ms=1; %用来指示T的时间序号,用来指示a,b以及w
strobe=zeros(1,Ns);
c1=0.0267;
c2=0.00035556; %环路滤波器系数
%%%%% 仿真输入测试的PSK基带数据 %%%
aI=real(out);
aQ=imag(out);
ik=[];
qk=[];
ns=length(aI)-2;
length(aI);
tic;
while(i<ns)
n_temp(i+1)=n(i)-w(ms);
if(n_temp(i+1)>0)
n(i+1)=n_temp(i+1);
else
n(i+1)=mod(n_temp(i+1),1);
%内插滤波器模块
FI1=0.5*aI(i+2-2)-0.5*aI(i+1-2)-0.5*aI(i-2)+0.5*aI(i-1-2);
FI2=1.5*aI(i+1-2)-0.5*aI(i+2-2)-0.5*aI(i-2)-0.5*aI(i-1-2);
FI3=aI(i-2);
.....................................................................
end
k=k+1;
u(k)=n(i)/w(ms);
end
i=i+1;
end
toc;
figure;
t=0:length(u)-1;
T=1/2400;
subplot(311);
plot(t*T,u);
xlabel('运算点数');
ylabel('分数间隔');
t=0:length(time_error)-1;
T=1/2400;
subplot(312);
plot(t*T,time_error);
xlabel('运算点数');
ylabel('定时误差');
t=0:length(w)-1;
T=1/2400;
subplot(313);
t=0:length(ik)-1;
T=1/1200;
plot(t*T,ik);title('最终的基带数据I');
len=length(ik);
symbolall=ik-1i*qk;
sym=zeros(1,len);
ik=[0,ik];
basebandSignal=symbolall';
%%
%载波同步
tic;
T=1/FS;
Yo = [];
%给锁相环一个初始相位
Phase0 = pi/4;
for frame=1:nf
x = basebandSignal(frame)*exp(sqrt(-1)*(phase*frame*T+Phase0)); %phase是反馈的调整变量,用来调整输入信号的载波频率来调整跟踪频率
%将数据转换到基带
......................................................................
Yo(frame)= dfrq;
end
%均衡器
OUT4 = CMA(OUT3);
OUT4 = OUT4;
toc;
LENS = 1000;%simulink设置的是1000.这里也1000.
axis([-0.5,0.5,-0.5,0.5]);
subplot(133);
plot(real(OUT4(LENS*(i-1)+1:LENS*i)),imag(OUT4(LENS*(i-1)+1:LENS*i)),'r.');title('CMA均衡基带数据星座图');
axis([-0.5,0.5,-0.5,0.5]);
pause(0.1);
end
y=OUT4;
T=1/2400;
Tx_real=y;
Tx_real=Tx_real';
t=t(1:length(Tx_real))*T;
data=[t' Tx_real];
ts2= timeseries;
ts2.Time=t';
ts2.Data=Tx_real;
save('data2.mat','-v7.3','ts2');
0X_027m4.完整算法代码文件
V