一、多感知任务
在移动机器人的感知系统,包括自动驾驶汽车和无人机,会使用多种传感器来获取关键信息,从而实现对环境的感知和物体检测。这些传感器包括相机、激光雷达、雷达、惯性测量单元(IMU)、全球导航卫星系统(GNSS)等。在自动驾驶和移动机器人的感知系统里面,相机的功能主要是周围的物体,这些感知任务包括任务包括物体检测和分割。
物体检测:物体检测是指通过处理传感器数据来检测环境中的物体,如汽车、行人、骑自行车的人、红绿灯等。YOLO系列网络是常用于实时物体检测的解决方案。这些网络可以实时识别多个物体,并提供它们的位置和边界框。

实例分割:实例分割是一项更复杂的任务,它不仅可以检测物体,还可以将它们分割成属于不同实例的部分。这对于跟踪和识别不同的车辆或行人非常有用。通常,Mask R-CNN等网络用于实例分割。

语义分割:语义分割是将图像中的每个像素分配到特定的语义类别的任务,例如将道路、建筑物、车辆等分割成不同的区域。U-Net和全卷积网络(FCN)等CNN架构通常用于语义分割。
在处理这些任务时,有两种主要方法可以考虑:
单一模型:开发一个单一的神经网络模型,可以同时处理多个感知任务,如检测、分割。这种方法可以提高计算效率,但需要大量的训练数据和复杂的网络结构。
多模型集成:使用多个独立的模型来处理不同的感知任务,每个模型专注于一个任务。这种方法可以更容易地处理不同任务之间的数据不平衡,并且可以根据任务的重要性对不同模型进行资源分配。
二、Hybridnets多任务框架
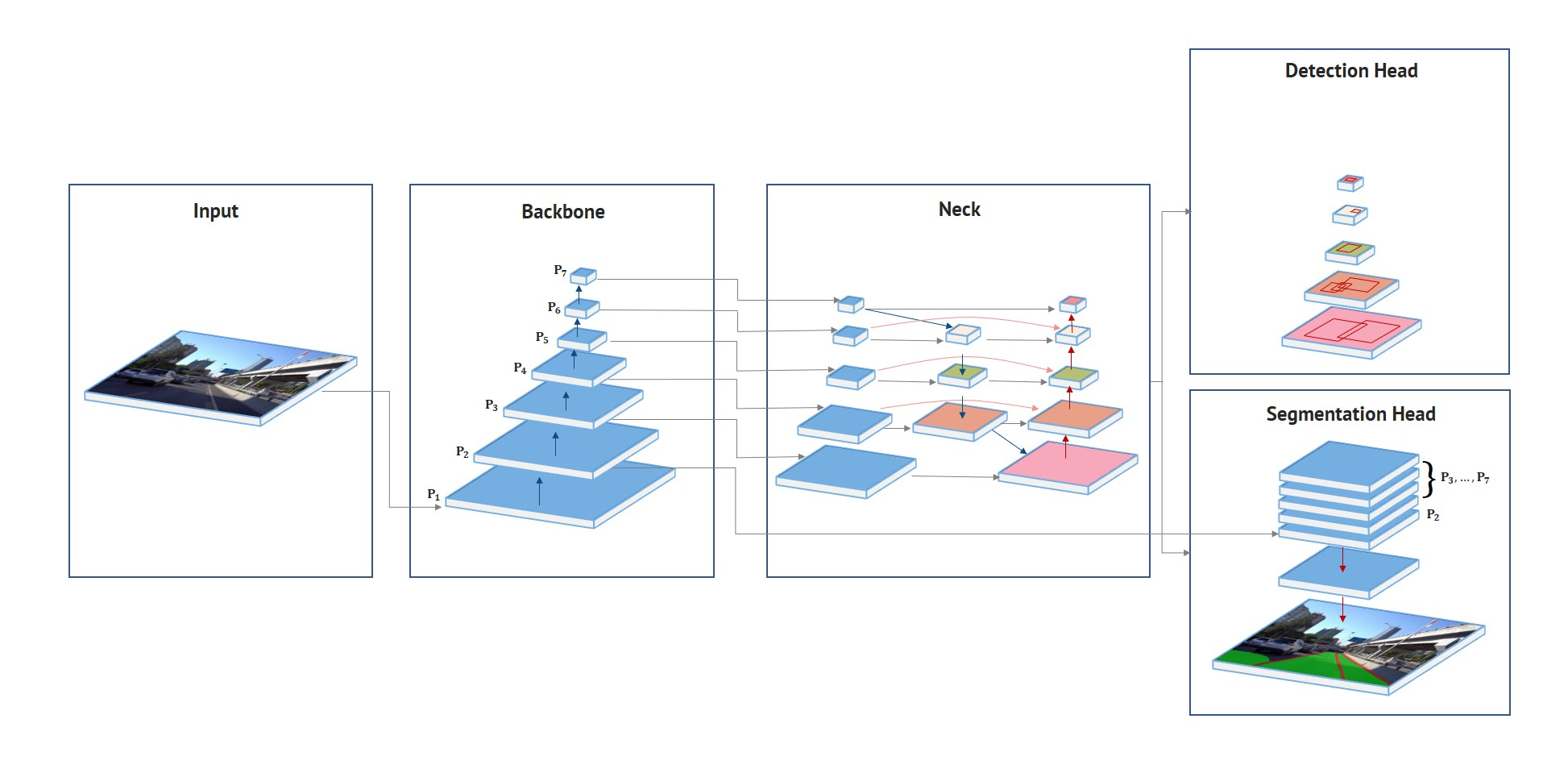
Hybridnets一种多任务处理的端到端多感知网络,它提出了几种关键的优化方法以提高精度。
- 引入了基于加权双向特征网络的高效分割头和边界框/类别预测网络。
- 提出了加权双向特征网络中各层的自动定制锚定方法。
- 提出了一种有效的训练损失函数和训练策略,以平衡和优化网络性能。
基于这些优化,Hybridnets开发了一种端到端感知网络,用于执行多任务处理,包括交通目标检测、可驾驶区域分割和车道线检测,将其称为混合网。混合网在伯克利DeepDrive数据集上表现出色,平均精度达到了77.3%,平均交并比为31.6%,并且参数数量仅为1283万,浮点操作数为156亿。此外,它能够实时执行视觉感知任务,因此是一个实用而准确的多任务处理解决方案。
算法源码:https://github.com/datvuthanh/HybridNets.git
三、使用C++进行模型部署
把训练好的模型转成onnx格式的模型,然后使用OpenCV 4.6 和contrib dnn模块进行推理,使用的IDE是Vs 2019。
首先定义一人模型推理的类,这里使用为了方便演示,只用CPU进行推理。
struct Net_config
{
float confThreshold;
float nmsThreshold;
std::string modelpath;
std::string anchorpath;
};
class HybridNets
{
public:
HybridNets(Net_config config);
cv::Mat detect(cv::Mat frame);
~HybridNets();
private:
int inpWidth;
int inpHeight;
std::vector<std::string> det_class_names = {
"car" };
std::vector<std::string> seg_class_names = {
"Background", "Lane", "Line" };
int det_num_class;
int seg_numclass;
float confThreshold;
float nmsThreshold;
cv::dnn::Net net;
float* anchors = nullptr;
const float mean_[3] = {
0.485, 0.456, 0.406 };
const float std_[3] = {
0.229, 0.224, 0.225 };
const bool keep_ratio = true;
cv::Mat resize_image(cv::Mat srcimg, int* newh, int* neww, int* padh, int* padw);
cv::Mat normalize_(cv::Mat img);
std::vector<cv::Vec3b> class_colors = {
cv::Vec3b(0,0,0), cv::Vec3b(0, 255, 0), cv::Vec3b(255, 0, 0) };
};
HybridNets::HybridNets(Net_config config)
{
this->confThreshold = config.confThreshold;
this->nmsThreshold = config.nmsThreshold;
this->net = cv::dnn::readNet(config.modelpath);
this->det_num_class = det_class_names.size();
this->seg_numclass = seg_class_names.size();
size_t pos = config.modelpath.rfind("_");
size_t pos_ = config.modelpath.rfind(".");
int len = pos_ - pos - 1;
std::string hxw = config.modelpath.substr(pos + 1, len);
pos = hxw.rfind("x");
std::string h = hxw.substr(0, pos);
len = hxw.length() - pos;
std::string w = hxw.substr(pos + 1, len);
this->inpHeight = stoi(h);
this->inpWidth = stoi(w);
pos = config.anchorpath.rfind("_");
pos_ = config.anchorpath.rfind(".");
len = pos_ - pos - 1;
std::string len_ = config.anchorpath.substr(pos + 1, len);
len = stoi(len_);
this->anchors = new float[len];
FILE* fp = fopen(config.anchorpath.c_str(), "rb");
fread(this->anchors, sizeof(float), len, fp);
fclose(fp);
}
HybridNets::~HybridNets()
{
delete[] anchors;
anchors = nullptr;
}
cv::Mat HybridNets::resize_image(cv::Mat srcimg, int* newh, int* neww, int* padh, int* padw)
{
int srch = srcimg.rows, srcw = srcimg.cols;
*newh = this->inpHeight;
*neww = this->inpWidth;
cv::Mat dstimg;
if (this->keep_ratio && srch != srcw) {
float hw_scale = (float)srch / srcw;
if (hw_scale > 1) {
*newh = this->inpHeight;
*neww = int(this->inpWidth / hw_scale);
resize(srcimg, dstimg, cv::Size(*neww, *newh), cv::INTER_LINEAR);
*padw = int((this->inpWidth - *neww) * 0.5);
copyMakeBorder(dstimg, dstimg, 0, 0, *padw, this->inpWidth - *neww - *padw, cv::BORDER_CONSTANT, 114);
}
else {
*newh = (int)this->inpHeight * hw_scale;
*neww = this->inpWidth;
resize(srcimg, dstimg, cv::Size(*neww, *newh), cv::INTER_LINEAR);
*padh = (int)(this->inpHeight - *newh) * 0.5;
copyMakeBorder(dstimg, dstimg, *padh, this->inpHeight - *newh - *padh, 0, 0, cv::BORDER_CONSTANT, 114);
}
}
else {
resize(srcimg, dstimg, cv::Size(*neww, *newh), cv::INTER_LINEAR);
}
return dstimg;
}
cv::Mat HybridNets::normalize_(cv::Mat img)
{
std::vector<cv::Mat> bgrChannels(3);
split(img, bgrChannels);
for (int c = 0; c < 3; c++)
{
bgrChannels[c].convertTo(bgrChannels[c], CV_32FC1, 1.0 / (255.0 * std_[c]), (0.0 - mean_[c]) / std_[c]);
}
cv::Mat m_normalized_mat;
merge(bgrChannels, m_normalized_mat);
return m_normalized_mat;
}
cv::Mat HybridNets::detect(cv::Mat srcimg)
{
int newh = 0, neww = 0, padh = 0, padw = 0;
cv::Mat rgbimg;
cvtColor(srcimg, rgbimg, cv::COLOR_BGR2RGB);
cv::Mat dstimg = this->resize_image(rgbimg, &newh, &neww, &padh, &padw);
cv::Mat normalized_mat = this->normalize_(dstimg);
cv::Mat blob = cv::dnn::blobFromImage(normalized_mat);
this->net.setInput(blob);
std::vector<cv::Mat> outs;
this->net.forward(outs, this->net.getUnconnectedOutLayersNames());
float* classification = (float*)outs[0].data;
float* box_regression = (float*)outs[1].data;
float* seg = (float*)outs[2].data;
std::vector<cv::Rect> boxes;
std::vector<float> confidences;
std::vector<int> classIds;
float ratioh = (float)srcimg.rows / newh, ratiow = (float)srcimg.cols / neww;
const int num_proposal = outs[1].size[1];
for (int n = 0; n < num_proposal; n++)
{
float conf = classification[n];
if (conf > this->confThreshold)
{
const int row_ind = n * 4;
float x_centers = box_regression[row_ind + 1] * this->anchors[row_ind + 2] + this->anchors[row_ind];
float y_centers = box_regression[row_ind] * this->anchors[row_ind + 3] + this->anchors[row_ind + 1];
float w = exp(box_regression[row_ind + 3]) * this->anchors[row_ind + 2];
float h = exp(box_regression[row_ind + 2]) * this->anchors[row_ind + 3];
float xmin = (x_centers - w * 0.5 - padw) * ratiow;
float ymin = (y_centers - h * 0.5 - padh) * ratioh;
w *= ratiow;
h *= ratioh;
cv::Rect box = cv::Rect(int(xmin), int(ymin), int(w), int(h));
boxes.push_back(box);
confidences.push_back(conf);
classIds.push_back(0);
}
}
std::vector<int> indices;
cv::dnn::NMSBoxes(boxes, confidences, this->confThreshold, this->nmsThreshold, indices);
cv::Mat outimg = srcimg.clone();
for (size_t i = 0; i < indices.size(); ++i)
{
int idx = indices[i];
cv::Rect box = boxes[idx];
rectangle(outimg, cv::Point(box.x, box.y), cv::Point(box.x + box.width, box.y + box.height), cv::Scalar(0, 0, 255), 2);
std::string label = cv::format("%.2f", confidences[idx]);
label = this->det_class_names[classIds[idx]] + ":" + label;
putText(outimg, label, cv::Point(box.x, box.y - 5), cv::FONT_HERSHEY_SIMPLEX, 0.75, cv::Scalar(0, 0, 255), 1);
}
const int area = this->inpHeight * this->inpWidth;
int i = 0, j = 0, c = 0;
for (i = 0; i < outimg.rows; i++)
{
for (j = 0; j < outimg.cols; j++)
{
const int x = int(j / ratiow) + padw;
const int y = int(i / ratioh) + padh;
int max_id = -1;
float max_conf = -10000;
for (c = 0; c < seg_numclass; c++)
{
float seg_conf = seg[c * area + y * this->inpWidth + x];
if (seg_conf > max_conf)
{
max_id = c;
max_conf = seg_conf;
}
}
if (max_id > 0)
{
outimg.at<cv::Vec3b>(i, j)[0] = this->class_colors[max_id][0];
outimg.at<cv::Vec3b>(i, j)[1] = this->class_colors[max_id][1];
outimg.at<cv::Vec3b>(i, j)[2] = this->class_colors[max_id][2];
}
}
}
return outimg;
}
读取视频,然后使用模型进行推理
int main()
{
Net_config cfg = {
0.3, 0.5, "models/hybridnets_768x1280.onnx", "models/anchors_736560.bin" };
HybridNets net(cfg);
//cv::VideoWriter outputVideo;
cv::VideoCapture cap("test2.mp4");
//cv::Size S = cv::Size((int)cap.get(cv::CAP_PROP_FRAME_WIDTH),
//(int)cap.get(cv::CAP_PROP_FRAME_HEIGHT));
//std::string out_path = "dst.ma4";
if (cap.isOpened())
{
//outputVideo.open(out_path, -1, 30.0, S, true);
cv::Mat cv_fram;
while (1)
{
cap.read(cv_fram);
if (!cv_fram.empty())
{
cv::Mat outimg = net.detect(cv_fram);
//outputVideo << outimg;
cv::imshow("视频", outimg);
}
if (cv::waitKey(100) == 27)break;
}
}
cap.release();
return 0;
}
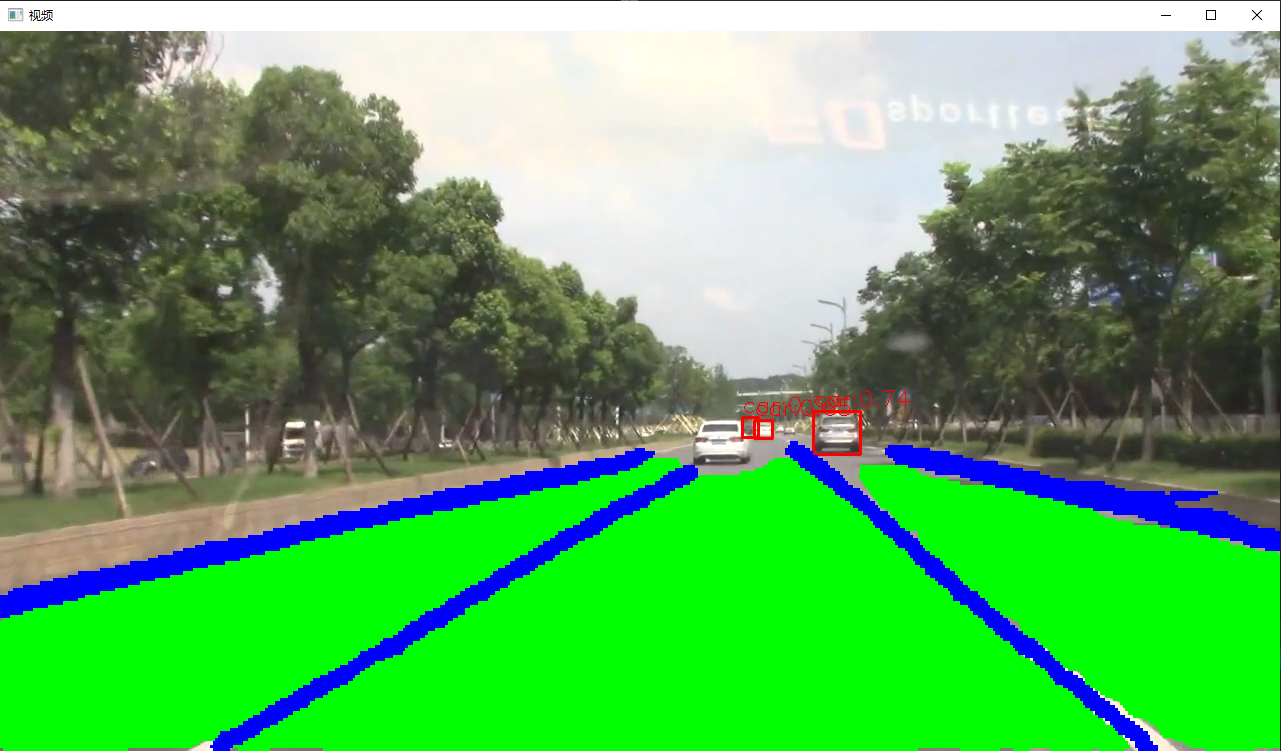
推理效果如下:
四、使用Python进行模型部署
import cv2
import argparse
import numpy as np
import os
print(cv2.__version__)
class HybridNets():
def __init__(self, modelpath, anchorpath, confThreshold=0.5, nmsThreshold=0.5):
self.det_classes = ["car"]
self.seg_classes = ["Background", "Lane", "Line"]
self.net = cv2.dnn.readNet(modelpath)
self.confThreshold = confThreshold
self.nmsThreshold = nmsThreshold
h, w = os.path.basename(modelpath).split('_')[-1].replace('.onnx', '').split('x')
self.inpHeight, self.inpWidth = int(h), int(w)
self.mean_ = np.array([0.485, 0.456, 0.406], dtype=np.float32).reshape((1, 1, 3))
self.std_ = np.array([0.229, 0.224, 0.225], dtype=np.float32).reshape((1, 1, 3))
self.anchors = np.load(anchorpath) ### cx_cy_w_h
def resize_image(self, srcimg, keep_ratio=True):
padh, padw, newh, neww = 0, 0, self.inpWidth, self.inpHeight
if keep_ratio and srcimg.shape[0] != srcimg.shape[1]:
hw_scale = srcimg.shape[0] / srcimg.shape[1]
if hw_scale > 1:
newh, neww = self.inpHeight, int(self.inpWidth / hw_scale)
img = cv2.resize(srcimg, (neww, newh), interpolation=cv2.INTER_LINEAR)
padw = int((self.inpWidth - neww) * 0.5)
img = cv2.copyMakeBorder(img, 0, 0, padw, self.inpWidth - neww - padw, cv2.BORDER_CONSTANT,
value=(114, 114, 114)) # add border
else:
newh, neww = int(self.inpHeight * hw_scale), self.inpWidth
img = cv2.resize(srcimg, (neww, newh), interpolation=cv2.INTER_LINEAR)
padh = int((self.inpHeight - newh) * 0.5)
img = cv2.copyMakeBorder(img, padh, self.inpHeight - newh - padh, 0, 0, cv2.BORDER_CONSTANT,
value=(114, 114, 114))
else:
img = cv2.resize(srcimg, (self.inpWidth, self.inpHeight), interpolation=cv2.INTER_LINEAR)
return img, newh, neww, padh, padw
def detect(self, srcimg):
img, newh, neww, padh, padw = self.resize_image(cv2.cvtColor(srcimg, cv2.COLOR_BGR2RGB))
scale_h, scale_w = srcimg.shape[0] / newh, srcimg.shape[1] / neww
img = (img.astype(np.float32) / 255.0 - self.mean_) / self.std_
# Sets the input to the network
blob = cv2.dnn.blobFromImage(img)
self.net.setInput(blob)
classification, box_regression, seg = self.net.forward(self.net.getUnconnectedOutLayersNames())
x_centers = box_regression[..., 1] * self.anchors[..., 2] + self.anchors[..., 0]
y_centers = box_regression[..., 0] * self.anchors[..., 3] + self.anchors[..., 1]
w = np.exp(box_regression[..., 3]) * self.anchors[..., 2]
h = np.exp(box_regression[..., 2]) * self.anchors[..., 3]
xmin = x_centers - w * 0.5
ymin = y_centers - h * 0.5
bboxes_wh = np.stack([xmin, ymin, w, h], axis=2).squeeze(axis=0)
confidences = np.max(classification.squeeze(axis=0), axis=1) ####max_class_confidence
classIds = np.argmax(classification.squeeze(axis=0), axis=1)
mask = confidences > self.confThreshold
bboxes_wh = bboxes_wh[mask]
confidences = confidences[mask]
classIds = classIds[mask]
bboxes_wh -= np.array([[padw, padh, 0, 0]])
bboxes_wh *= np.array([[scale_w, scale_h, scale_w, scale_h]])
indices = cv2.dnn.NMSBoxes(bboxes_wh.tolist(), confidences.tolist(), self.confThreshold,
self.nmsThreshold).flatten().tolist()
drive_area_mask = np.squeeze(seg, axis=0)[:, padh:(self.inpHeight - padh), padw:(self.inpWidth - padw)]
seg_id = np.argmax(drive_area_mask, axis=0).astype(np.uint8)
seg_id = cv2.resize(seg_id, (srcimg.shape[1], srcimg.shape[0]), interpolation=cv2.INTER_NEAREST)
outimg = srcimg.copy()
for ind in indices:
x, y, w, h = bboxes_wh[ind,:].astype(int)
cv2.rectangle(outimg, (x, y), (x + w, y + h), (0, 0, 255), thickness=2, lineType=cv2.LINE_AA)
cv2.putText(outimg, self.det_classes[classIds[ind]]+ ":" + str(round(confidences[ind], 2)), (x, y - 5), cv2.FONT_HERSHEY_SIMPLEX, 0.75, (0, 0, 255),
thickness=1, lineType=cv2.LINE_AA)
outimg[seg_id == 1] = [0, 255, 0]
outimg[seg_id == 2] = [255, 0, 0]
return outimg
if __name__ == "__main__":
parser = argparse.ArgumentParser()
parser.add_argument('--imgpath', type=str, default='images/test.jpg', help="image path")
parser.add_argument('--modelpath', type=str, default='models/hybridnets_768x1280.onnx')
parser.add_argument('--anchorpath', type=str, default='models/anchors_768x1280.npy')
parser.add_argument('--confThreshold', default=0.3, type=float, help='class confidence')
parser.add_argument('--nmsThreshold', default=0.5, type=float, help='nms iou thresh')
args = parser.parse_args()
yolonet = HybridNets(args.modelpath, args.anchorpath, confThreshold=args.confThreshold,
nmsThreshold=args.nmsThreshold)
srcimg = cv2.imread(args.imgpath)
srcimg = yolonet.detect(srcimg)
cv2.namedWindow('dst', 0)
cv2.imshow('dst', srcimg)
cv2.waitKey(0)
cv2.destroyAllWindows()
