2.7 阵列响应矢量/矩阵
常用的阵列形式包括均匀线阵、均匀圆阵、L型阵列、平面阵列和任意阵列等。
1、均匀线阵

假设接收信号满足窄带条件,即信号经过阵列长度所需的时间应远远小于信号的相干时间,信号包络在天线阵列传播时间内变化不大。为简化,假定信源和天线阵列是在同一平面内,并且入射到阵列为平面波。
来波方向为
一共有个阵元
则阵元间距为的均匀线阵的阵列响应矢量为:
定义方向矩阵为:
2、均匀圆阵

均匀圆形的M个相同的全向阵列均匀分布在平面x-y上一个半径为R的圆周上,如图所示。
采用球面坐标系表示入射平面波的波达方向,坐标系的原点O在阵列的中心。信源的仰角是原点到信源的连线与z轴之间的夹角,方位角
则是原点到信源的连线在平面x-y的投影与x轴之间的夹角。
方向矢量是DOA为
的阵列响应,
可表示为:
其中,,
为半径
3、L型阵列
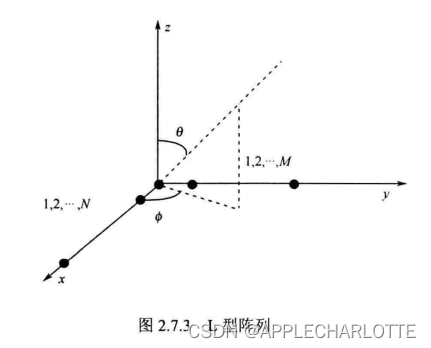
L型阵列由x轴上阵元数为N的均匀线阵和y轴上阵元数为M的均匀线阵组成,一个有M+N-1个阵元。阵元间距为d。
假设空间有K个信源照射到阵列上,其二维波达方向为
其中和
分别代表第k个信源的仰角和方位角。
假设入射到此阵列上的信源数为K,则x轴上N个阵元对应的方向矩阵为
y轴上M个阵元对应的方向矩阵为:
其中和
均为范德蒙德矩阵。
4、平面阵列

设平面阵列的阵元数为M*N,信源数为K。
其中和
分别代表第k个信源的仰角和方位角。
则空间的第i个阵元与参考阵元之间的波程差为:
式中,为第i个阵元的坐标,面阵一般在x-y面内,所以
一般为0
由上面L型阵列的分析可知,x轴上的N个阵元的方向为,y轴上的M个阵元的方向为
。所以如上图所示的子阵1的方向矩阵为
,而子阵2的方向矩阵就需要考虑沿y轴的偏移,每个阵元相对于参考阵元的波程差就等于子阵1的阵元的波程差加上
,所以可得:
子阵1:
子阵2:
......
子阵M:
其中,是由矩阵的m行构造的一个对角矩阵。
5、任意阵列
假设M元阵列位于任意三维空间中,如图所示。定义阵列中第m个传感器为。方向矩阵是:
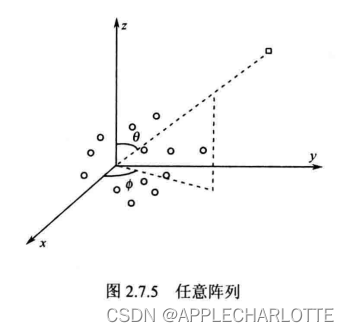
其中,是第k个信源的方向矢量,可以表示为:
其中是波长。