论文速读 – Automatic Labeling to Generate Training Data for Online LiDAR-based Moving Object Segmentation
先赞后看,养成好习惯。有帮助的话,点波关注!我会坚持更新,感谢您的支持!
参考:
1. Auto-MOS
2. Mapless Online Detection of Dynamic Objects in 3D Lidar
3. Rigid scene flow for 3d lidar scans
4. Efficient Surfel-Based SLAM using 3D Laser Range Data in Urban Environments
5. ERASOR
6. Multiple Dynamic Object Tracking
7. LMNet
8. KPConv: Flexible and Deformable Convolution for Point Clouds
一. 摘要
深度学习有监督网络需要大量标注浩的数据,费用较高。本文中提出自动化离线生成标注标签训练数据,提升基于学习方式的MOS(MotionSegmentation)系统的表现性能。它首先利用基于占据的动态对象移除,去粗略地检测可能的动态对象。再可能对象中进行再次提取,并使用卡尔曼跟踪它们。基于跟踪的轨迹,能够标记出实际移动的物体,如正在行驶的汽车和行人。反之,非移动物体被标记为静止。我们训练的自动生成标注的神经网络性能达到跟手动标注相同的表现。
二. 介绍
主要工作:
1)我们方法可以生成点云运动分割任务更好的标签。
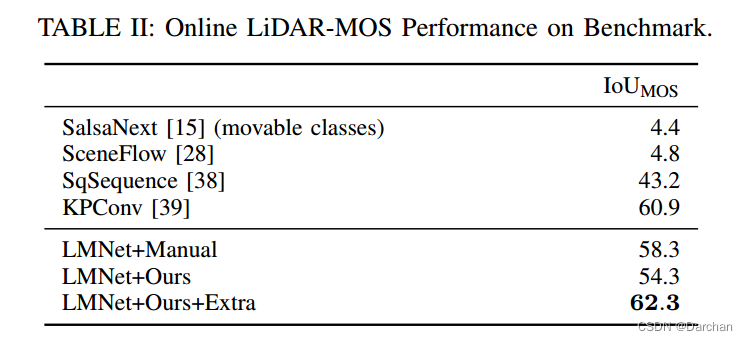
2)基于我们生成的标签,网络达到相似性能;加上手工标注的标签之后,网络性能会提升。
3)不同pattern的雷达、不同环境的,我们都可以生成有效标签。
相关工作:
基于几何的方法:启发几何式 Mapless Online Detection of Dynamic Objects in 3D Lidar、估计刚体运动流 Rigid scene flow for 3d lidar scans深度学习方法:SuMa++ 提升SLAM表现、LMNet离线标签生成: 生成干净的静态地图,主要有Removert, ERASOR, and 占据地图的方法。
我们的方法不需要真实位姿和追踪方式去分辨运动和非运动物体。
三. 模型方法
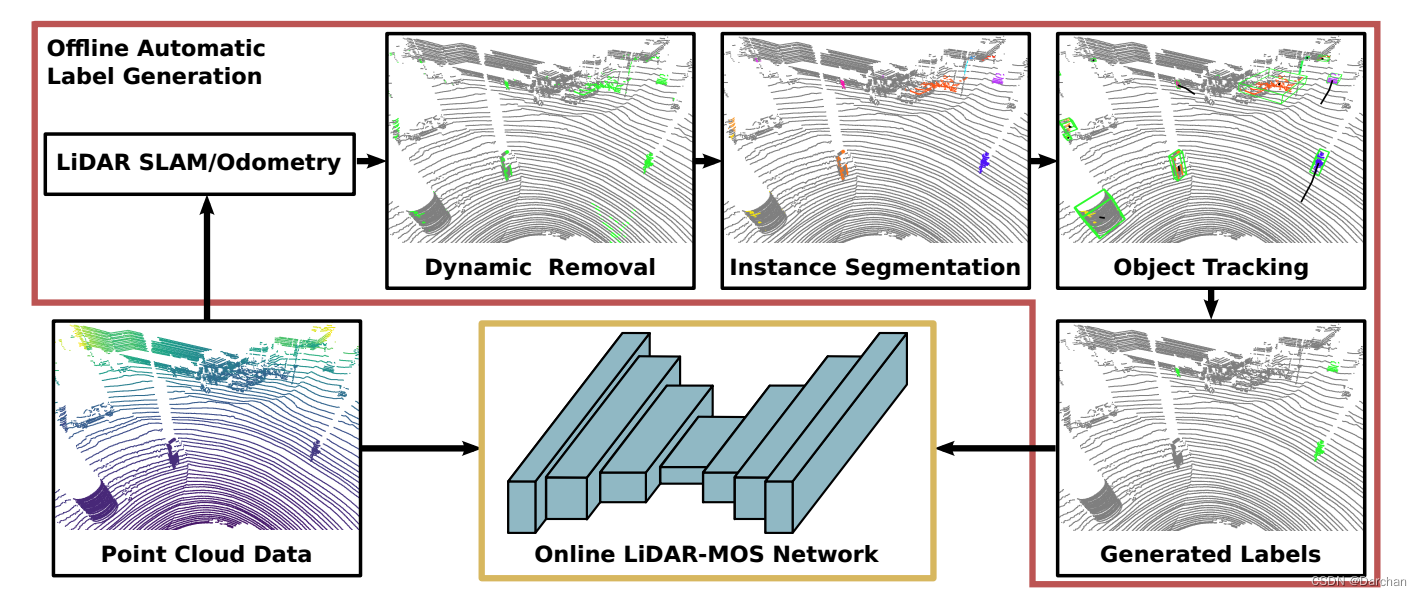
总共包含5个模块。
- 先使用雷达里程计或者SLAM(
SuMa)进行相邻帧间位姿计算。 - 使用干净地图方法(
ERASOR)进行稠密运动物体检测。 - 基于上一步中的稠密运动目标进行聚类(
HDBSCAN),将点云分成不相交的实例,每个实例包含中心、朝向角,长宽高、置信度。 - 再使用多目标追踪进行实例关联(Multiple Dynamic Object Tracking),并基于追踪轨迹生成最终的实例标签,EKF会帮助未检测到的某一帧,重新赋予实例。
- 训练神经网络LMNet
四. 实验评估
评价指标:IoU
SementicKitti数据集:
- 00-07seq + 09-10seq ----> 训练
- 08 ----> 验证
- 11-21 ----> 测试
结果
泛化能力:
测试了3个数据集 Apollo-ColumbiaParkMapData 、MulRan、IPB-Car