文章目录
一、模型的实时处理能力
计算机视觉模型的实时处理能力取决于多个因素,包括模型的架构、模型的大小和复杂度、硬件设备的性能等。
模型架构:不同的计算机视觉模型具有不同的架构和复杂度。一些轻量级的模型,如MobileNet、SqueezeNet等,通常具有较少的参数和较低的计算复杂度,因此可以在较低性能的设备上实现实时处理。相反,一些大型的模型,如ResNet、Inception等,具有更多的参数和更高的计算复杂度,可能需要更强大的硬件设备才能实现实时处理。
模型大小和复杂度:模型的大小和复杂度也会影响实时处理能力。较小和简单的模型通常需要较少的计算资源,并且更容易在实时环境中进行推断。较大和复杂的模型可能需要更多的计算资源和内存,并可能导致更长的推断时间。
硬件设备:实时处理能力还受到硬件设备的影响。强大的处理器(CPU)和图形处理器(GPU)能够更高效地执行计算密集型任务,并在更短的时间内完成推断。专用的硬件加速器,如Tensor Processing Unit (TPU)、Neural Processing Unit (NPU)等,还可以进一步提高实时处理能力。
优化技术:采用一些优化技术也可以提高计算机视觉模型的实时处理能力。例如,模型压缩和量化技术可以减少模型的大小和计算需求,从而提高推断速度。并行计算和分布式推断技术可以利用多个处理单元同时执行模型推断,加快处理速度。
综上所述,实时处理能力是一个相对的概念,取决于模型的复杂度和大小、硬件设备的性能以及采用的优化技术。根据具体的场景和需求,可以选择适当的模型和硬件配置,并应用优化技术来提高计算机视觉模型的实时处理能力。
二、Panoptic Segmentation(全景分割)
Panoptic Segmentation(全景分割)是计算机视觉领域中的一项任务,旨在对图像中的每个像素进行语义分割,并将像素分为两个不同的类别:可数对象(可识别的物体,如人、车、动物等)和不可数背景(通常是场景中的大面积区域,如天空、道路等)。
与传统的语义分割任务不同,全景分割不仅要对图像中的每个像素进行语义分类,还需要对可数对象进行实例分割,即将每个对象的像素分配给相应的实例。因此,全景分割结合了语义分割和实例分割的任务。
全景分割的目标是生成一个具有两个通道的分割图像,其中一个通道表示语义分割结果,即将像素分为不同的语义类别;另一个通道表示实例分割结果,即将每个对象的像素分配给相应的实例。通过全景分割,可以获得对图像中每个像素的详细语义理解,并且可以识别和区分不同的对象实例。
全景分割在许多计算机视觉应用中具有重要的作用,如自动驾驶、智能监控、增强现实等。它为场景理解和感知提供了更精细和准确的信息,有助于计算机系统对环境进行更深入的分析和决策。
总结起来,全景分割是一种同时进行语义分割和实例分割的任务,旨在对图像中的每个像素进行精确的语义分类和对象实例分割,从而实现对图像的全面理解和场景分析。
三、语义分割&实例分割&全景分割
3.1 semantic segmentation(语义分割)
通常意义上的目标分割指的就是语义分割。
需要区分到图中每一点像素点,而不仅仅是矩形框框住了。但是同一物体的不同实例不需要单独分割出来。

标注为人,羊,狗,草地。
3.2 Instance segmentation(实例分割)
是目标检测和语义分割的结合。
相对目标检测的边界框,实例分割可精确到物体的边缘;相对语义分割,实例分割需要标注出图上同一物体的不同个体(羊1,羊2,羊3…)

目前常用的实例分割算法是Mask R-CNN。
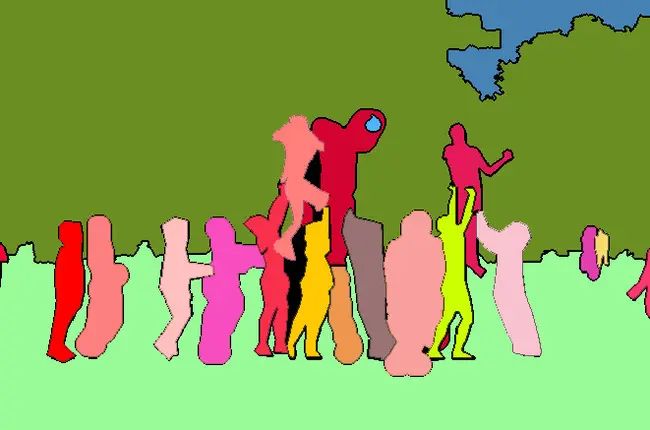
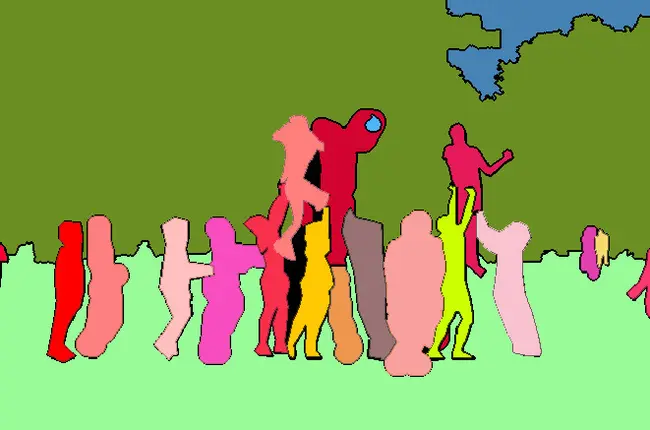
3.3 Panoramic segmentation(全景分割)
全景分割是语义分割和实例分割的结合。
跟实例分割不同的是:实例分割只对图像中的object进行检测,并对检测到的object进行分割,而全景分割是对图中的所有物体包括背景都要进行检测和分割。
四、解耦结构
在计算机视觉中,解耦结构是指将深度学习模型的不同组件或模块进行解耦,使它们能够独立地学习和发挥作用,以提高模型的灵活性和可扩展性。
在传统的深度学习模型中,不同的组件或模块通常是紧密耦合的,彼此之间存在较高的依赖性。这种紧耦合结构可能导致模型难以扩展、难以调试和难以理解。因此,解耦结构的设计旨在减少组件之间的耦合度,使得它们可以单独地进行修改、替换和调整,而不会对整个系统产生过多的影响。
解耦结构的实现可以通过以下方式:
- 模块化设计:将模型划分为多个模块,每个模块负责特定的功能。这些模块可以是卷积层、池化层、注意力机制、残差连接等。模块化设计使得不同模块可以独立地进行训练和优化,并且可以更容易地替换或增加新的模块。
- 分离网络:将网络拆分为多个子网络,每个子网络负责处理不同的任务或特征。例如,可以将一个目标检测网络拆分为一个用于提取特征的主干网络和一个用于预测边界框的头部网络。这种分离结构使得不同任务的网络可以独立地进行训练和优化,并且可以更好地适应不同的应用场景。
- 异构网络:将不同类型的网络结构组合在一起,每个网络负责处理特定的输入或任务。例如,可以将一个卷积神经网络和一个循环神经网络组合在一起,用于处理图像和文本之间的关联。这种异构网络结构充分利用了不同类型网络的优势,并且可以提高模型的表现能力和泛化能力。
通过解耦结构的设计,计算机视觉模型可以更灵活地进行组件的选择、替换和修改,以适应不同的任务和数据特点。此外,解耦结构还可以提高模型的可解释性和可调试性,使得研究人员和开发者更容易理解模型的工作原理和进行调试优化。
五、Anchor-Based
Anchor-Based是目标检测中一种常用的方法,用于定位和识别图像中的目标物体。它基于预定义的一组锚框(Anchor Boxes),通过对这些锚框进行位置调整和分类,来预测图像中的目标位置和类别。
在Anchor-Based方法中,锚框是一些预定义的矩形框,具有不同的大小和宽高比。这些锚框通常覆盖了图像中的多个尺度和形状,以便能够检测不同大小和形状的目标。每个锚框都与一个特定的位置和尺度相关联。
目标检测过程中,首先在图像的每个位置生成一组锚框,并为每个锚框分配一个类别标签(目标或背景)。然后,通过计算锚框与真实目标框之间的偏移量,进行位置调整,以更准确地预测目标的位置。最后,根据锚框的类别标签和位置调整,筛选出具有高置信度的目标框作为最终的检测结果。
Anchor-Based方法的优点是它可以在不同尺度和形状的目标上进行有效的检测。通过使用预定义的锚框,模型可以通过回归偏移量来适应不同大小和形状的目标,从而提高检测的准确性。此外,由于锚框的设计是基于先验知识,可以减少计算量和减少候选框的数量,从而提高检测的速度。
然而,Anchor-Based方法也存在一些挑战。例如,锚框的数量和尺度选择可能会影响检测结果的质量。过多或不合适的锚框设计可能导致检测的冗余或遗漏。此外,锚框的位置调整和类别分类是基于固定大小的锚框进行的,可能对目标边界框的精确位置和尺度变化造成限制。
总的来说,Anchor-Based是一种常见且有效的目标检测方法,它通过使用预定义的锚框来进行位置调整和分类,可以在不同尺度和形状的目标上进行检测。它在许多先进的目标检测模型中被广泛应用,并取得了很好的检测性能。
六、Anchor-Free
Anchor-Free是目标检测中的一种方法,与Anchor-Based方法相反,它不使用预定义的锚框来进行目标检测。相反,Anchor-Free方法通过直接预测目标的位置和尺寸,实现目标检测任务。
在Anchor-Free方法中,模型通过回归预测目标的中心点位置、宽度和高度,而不是调整预定义的锚框。这样可以更灵活地适应不同形状和尺寸的目标,避免了锚框尺寸和形状选择的困扰。
Anchor-Free方法通常使用密集的采样点或特征图上的位置来生成目标检测的候选区域。然后,通过对每个候选区域进行分类和位置回归,来确定目标的类别和边界框。由于没有预定义的锚框,Anchor-Free方法在预测目标位置时具有更大的灵活性,可以更准确地适应目标的形状和尺寸变化。
Anchor-Free方法的优点是它具有更好的适应性,可以适应各种形状和尺寸的目标。它不需要事先定义锚框,因此减少了设计参数和计算量,简化了模型的结构。此外,Anchor-Free方法还能够更好地处理密集目标和重叠目标的检测。
然而,Anchor-Free方法也存在一些挑战。由于没有锚框的约束,模型需要更高的预测精度和更大的感受野来捕捉目标的准确位置信息。此外,由于没有锚框进行先验信息的引导,Anchor-Free方法可能更容易受到背景干扰和噪声的影响。
总的来说,Anchor-Free是一种相对于Anchor-Based的另一种目标检测方法,它通过直接预测目标的位置和尺寸来实现目标检测。它具有更好的适应性和灵活性,能够适应各种形状和尺寸的目标。Anchor-Free方法在某些场景下可以取得良好的检测性能,但仍然需要克服一些挑战。
七、特征金字塔网络(FPN)
特征金字塔网络(Feature Pyramid Network,简称FPN)是一种用于解决目标检测和语义分割等计算机视觉任务的网络结构。
FPN的主要目标是解决不同尺度目标的检测问题。在传统的卷积神经网络中,由于网络的层数逐渐加深,感受野逐渐增大,但分辨率逐渐减小。这导致网络在较高层次的特征图中可能无法捕捉到小尺度的目标信息。
FPN通过在网络中引入特征金字塔结构,以获取多尺度的特征表示。它通过自顶向下和自底向上的路径来生成多尺度特征金字塔。自底向上的路径从底层特征图开始,通过上采样或卷积操作逐渐增加分辨率,但减少通道数。自顶向下的路径从高层特征图开始,通过下采样或卷积操作逐渐减少分辨率,但增加通道数。这样,自顶向下的路径可以提供更丰富的语义信息,而自底向上的路径可以提供更精细的空间信息。
通过在不同尺度的特征图之间建立连接,FPN可以实现特征的融合和上下文信息的传递。在融合阶段,FPN通过上采样或卷积操作将自底向上的特征图与自顶向下的特征图进行融合,得到具有多尺度信息的特征金字塔。这样,网络可以在不同尺度上进行目标检测,从而提高检测的准确性和鲁棒性。
FPN的设计使得网络可以同时处理不同尺度的目标,并且具有较好的细节保留能力和语义信息丰富性。它已经被广泛应用于目标检测和语义分割任务中,并取得了显著的性能改进。