一、Split Shuffle Block
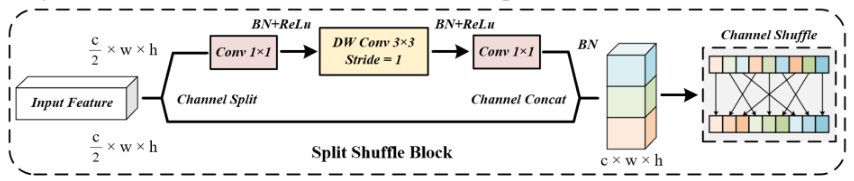
Split Shuffle Block(分割混洗块)是一种用于深度学习模型的基础组件,旨在增强模型的表征能力和学习能力。该概念最常用于图像分类任务中,特别是在卷积神经网络(CNN)的设计中。
Split Shuffle Block的核心思想是将输入特征图分割成多个子块,然后对这些子块进行混洗操作。混洗操作通常涉及将不同子块之间的特征进行重新排列,以引入更多的变化和多样性。这有助于模型更好地捕捉图像中的细节和结构,并提高模型的泛化能力。
在具体实现中,Split Shuffle Block通常由以下几个步骤组成:
- 分割阶段:将输入特征图分割成多个子块。通常使用固定大小的滑动窗口或卷积操作来实现分割。
- 混洗阶段:对分割后的子块进行混洗操作。混洗操作可以包括随机排列、旋转、翻转等方式,以引入多样性和随机性。
- 合并阶段:将混洗后的子块重新合并成一个特征图,作为下一层的输入。
通过引入Split Shuffle Block,模型可以从多个子块中学习到更多的特征表示,从而增加模型的表征能力和学习能力。此外,混洗操作还有助于减少特征之间的相关性,从而促进模型的鲁棒性和泛化能力。
Split Shuffle Block在一些先进的图像分类网络中被广泛应用,例如ShuffleNet和MobileNetV2。这些网络结构通过使用Split Shuffle Block来实现高效的特征提取和参数共享,从而在保持准确性的同时减少计算和内存开销。
总之,Split Shuffle Block是一种用于增强深度学习模型表征能力的基础组件,通过分割和混洗操作,可以引入多样性和变化,提高模型的学习能力和泛化能力。
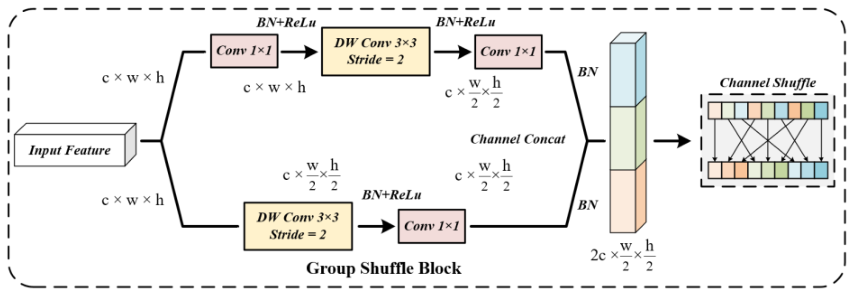
二、Group Shuffle Block
Group Shuffle Block(分组混洗块)是一种在深度学习模型中用于增强特征表示和改善模型性能的基础组件。该概念主要应用于卷积神经网络(CNN)中,并在图像分类和目标检测等任务中发挥重要作用。
Group Shuffle Block的主要思想是将输入特征图分为多个组,并在组内进行特征混洗操作。通过在组内进行特征混洗,可以增加特征之间的交互和信息流动,从而改善特征的表达能力。
下面是Group Shuffle Block的详细介绍:
- 分组:将输入特征图分为多个组。分组的方式可以是固定的,也可以是根据网络的设计和任务需求进行自适应的分组方式。
- 特征混洗:在每个组内进行特征混洗操作。这通常涉及将组内的特征通道重新排列或混洗,以引入特征之间的交互。混洗操作可以是随机的或基于特定的规则,如随机排列、轮换等。
- 合并:将经过特征混洗的组合并为一个特征图,作为下一层的输入。合并操作通常通过拼接或连接的方式进行。
通过引入Group Shuffle Block,模型可以在每个组内引入特征混洗操作,从而增加特征之间的交互和信息流动。这有助于改善特征的表达能力,并提高模型的学习能力和性能。
Group Shuffle Block的应用可以在不同层级上进行,例如在网络的浅层或深层中使用。在浅层中使用Group Shuffle Block可以提取更加丰富和多样化的特征表示,而在深层中使用可以加强特征的重组和整合,促进更高级的语义理解。
Group Shuffle Block的概念被广泛应用于一些先进的网络结构,如ShuffleNet和MobileNetV3。这些网络利用Group Shuffle Block来实现高效的特征提取、信息交互和参数共享,从而在保持准确性的同时减少计算和内存开销。
总结来说,Group Shuffle Block是一种用于增强深度学习模型特征表示能力的基础组件,通过分组和特征混洗操作,可以增加特征之间的交互和信息流动,提高模型的学习能力和性能。它在卷积神经网络中被广泛应用,并取得了显著的成果。
三、复杂非结构化室内场景
复杂非结构化室内场景指的是在室内环境中存在大量复杂、多样化、不规则的元素和特征的场景。这些场景可能包含多种物体、家具、装饰品、杂乱的布局以及各种光照条件和纹理变化等因素,使得场景的结构和组织方式不规则、难以捉摸。
理解复杂非结构化室内场景需要考虑以下几个方面:
- 物体多样性:复杂非结构化室内场景中可能存在各种形状、尺寸、颜色和材质的物体。理解场景需要注意识别和区分这些物体,并理解它们之间的关系和作用。
- 空间布局:室内场景的布局通常是非规则的,可能包含多个房间、走廊、过道等。理解场景涉及到理解空间布局、房间之间的连接和流动方式。
- 光照和材质:复杂室内场景中的光照条件和材质变化可能会导致场景的视觉特征发生变化。理解场景需要考虑光照的影响以及不同材质之间的反射和吸收特性。
- 上下文信息:理解复杂非结构化室内场景还需要考虑上下文信息,例如家居环境中的摆设和摆放规则、人们的行为习惯等。这些上下文信息可以帮助解释场景中出现的物体和结构。
为了更好地理解复杂非结构化室内场景,可以利用计算机视觉和深度学习技术进行场景分析和理解。例如,通过物体检测、语义分割和场景重建等技术,可以识别和分割场景中的物体,推断出空间布局,从而实现对场景的理解和描述。