此前出了目标检测算法改进专栏,但是对于应用于什么场景,需要什么改进方法对应与自己的应用场景有效果,并且多少改进点能发什么水平的文章,为解决大家的困惑,此系列文章旨在给大家解读发表高水平学术期刊中的 SCI论文,并对相应的SCI期刊进行介绍,帮助大家解答疑惑,助力科研论文投稿。解读的系列文章,本人会进行 创新点代码复现,有需要的朋友可关注私信我获取。

一、摘要
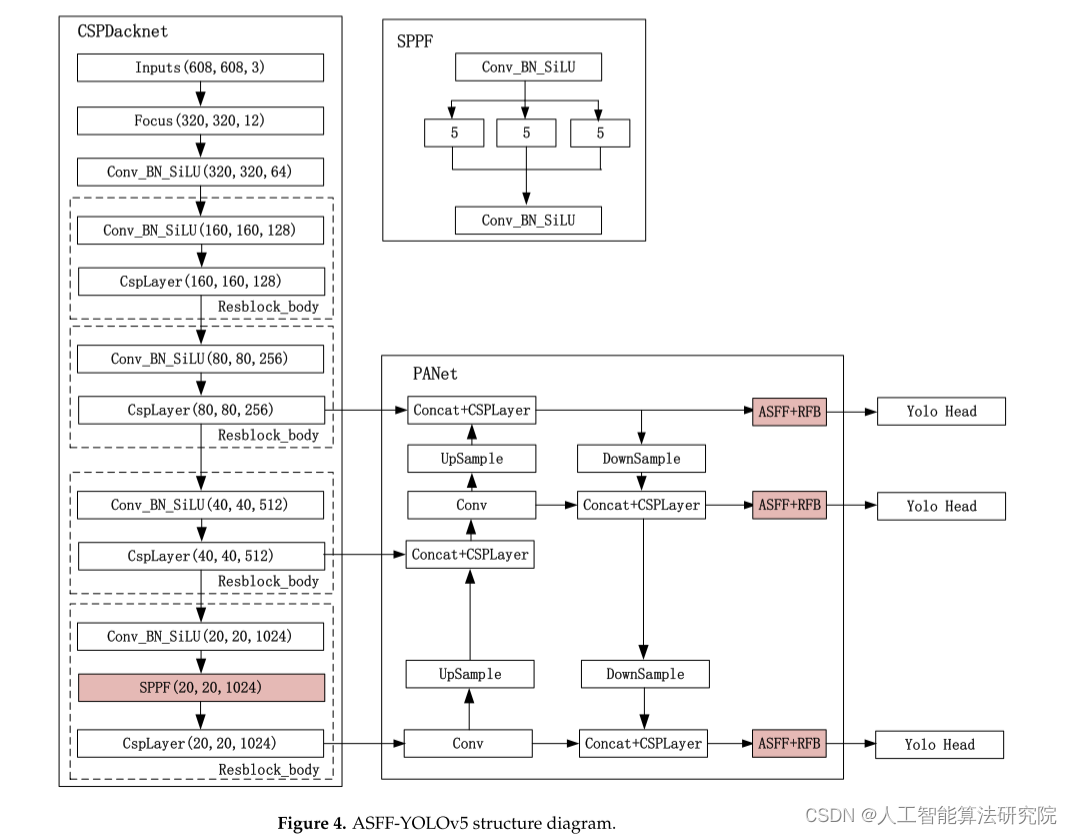
ASFF-YOLOv5:基于多尺度特征融合的无人机图像道路交通多要素检测方法道路交通要素是道路的重要组成部分,是构建基础交通地理信息数据库的主要要素。然而,在道路交通要素的检测和识别中仍然存在以下问题:元素密集,多尺度目标检测效果差,小目标易受遮挡因素影响。为此,提出一种自适应空间特征融合(ASFF)YOLOv 5网络(ASFF-YOLOv 5),用于多尺度道路交通要素的自动识别和检测。首先,利用K-means++算法对多尺度道路交通元素的范围进行聚类统计,得到适合数据集的候选框大小。然后,空间金字塔池快速(SPPF)结构,用于提高分类精度和速度,同时实现更丰富的特征信息提取。提出了一种基于感受野块(RFB)的ASFF策略,以提高特征尺度不变性,增强小目标检测效果。最后通过计算平均精密度(mAP)来评价实验效果。实验结果表明,该方法的mAP值为93.1%,即比原YOLOv 5车型提升19.2%。
二、网络模型及核心创新点
1.利用K-means++算法对多尺度道路交通元素的范围进行聚类统计,得到适合数据集的候选框大小。
2.空间金字塔池快速(SPPF)结构,用于提高分类精度和速度,同时实现更丰富的特征信息提取。
3.提出基于感受野块(RFB)的ASFF策略,以提高特征尺度不变性,增强小目标检测效果。
三、实验效果(部分展示)
1.比较实验:为了验证该方法的有效性,本文对经典的目标检测网络算法进行了比较。SSD ,Retinanet ,Faster R-CNN,YOLOv 3 YOLOv 4 ,YOLOv 5 网络以及以前的研究被选择用于与所提出的方法进行比较实验。
在实验中,AP,精度,召回率,和mAP评价指标的值进行了计算和比较时,道路交通的多元数据集进行训练。如表3所示,统计了不同网络模型下多元道路交通的识别精度。其中,通过比较每个网络和所提出的方法来计算增加的mAP值。
2.消融实验
为了验证该算法的有效性,在多元素道路交通数据集上进行了消融实验,并对K-means++、SPPF和ASFF融合后的实验结果进行了比较。计算并比较AP、精确度、召回率和mAP值。消融测试结果如表5所示。

实验结果表明,上述消融实验可以取得良好的斑马线检测结果,没有检测错误或漏检。但上述烧蚀实验在检测街面停车位时均出现漏检,漏检街面停车位数量在3 ~ 11个之间。从总体结果来看,虽然YOLOv 5 + SPPF方法的平均检测准确率最高,但漏检斑点数最严重,为11个。与烧蚀实验中出现的严重漏检相比,该方法仅漏检3次,是烧蚀实验中漏检次数最少的方法。该方法的检测准确率为93。5%,对于遮挡的路边停车位,两者仅相差0.28,但漏检率大大降低。实验证明,该方法在保证检测正确性的同时,保持了检测精度,尤其是在检测遮挡小目标和并列密集小目标方面有很高的提高。
五、实验结论
针对无人机遥感影像交通要素信息提取数据少、自动化程度低但要求高、要素规模小、易受环境干扰等问题,提出了一种基于ASFF-YOLOv 5的无人机遥感影像交通要素信息提取算法。该算法采用基于感受野模块的自适应空间特征融合方法,充分利用不同尺度信息,提高了特征尺度的不变性,提高了小目标的检测效果。当检测多个道路交通元素时,所提出的方法的mAP达到93。1%,即19。比原YOLOv5网络提升2%。对比实验和消融实验表明,该方法能够解决多要素道路交通的误检和漏检问题,提高多要素道路中小目标和密集目标的检测精度,为基础地理交通信息数据库建设提供了一种新的解决方案。
注:论文原文出自ASFF-YOLOv5: Multielement Detection Method for Road Traffic in UAV Images Based on Multiscale Feature Fusion 本文仅用于学术分享,如有侵权,请联系后台作删文处理。
解读的系列文章,本人已进行创新点代码复现,有需要的朋友欢迎关注私信我获取 ❤ 。