上一话
复现Object Detection,会复现的网络架构有:
1.SSD: Single Shot MultiBox Detector(√)
2.RetinaNet
3.Faster RCNN
4.YOLO系列
....
代码:
1.复现SSD
1.4推理
推理阶段比较好理解,代码如下
代码
import torch
from torchvision.ops import nms
from torch.autograd import Function
from models.detection.SSD.utils.box_utils import decode
class Detect(Function):
"""At test time, Detect is the final layer of SSD. Decode location preds,
apply non-maximum suppression to location predictions based on conf
scores and threshold to a top_k number of output predictions for both
confidence score and locations.
"""
def __init__(self, num_classes, top_k, conf_thresh, nms_thresh, bkg_label=0):
self.num_classes = num_classes
self.top_k = top_k
self.conf_thresh = conf_thresh
# Parameters used in nms.
self.nms_thresh = nms_thresh
if nms_thresh <= 0:
raise ValueError('nms_threshold must be non negative.')
self.background_label = bkg_label
self.variance = [0.1, 0.2]
def forward(self, loc_data, conf_data, prior_data):
"""
Args:
loc_data: (tensor) Loc preds from loc layers
Shape: [batch,num_priors,4]
conf_data: (tensor) Shape: Conf preds from conf layers
Shape: [batch,num_priors,num_classes]
prior_data: (tensor) Prior boxes and variances from priorbox layers
Shape: [num_priors,4]
"""
num = loc_data.size(0) # batch size
num_priors = prior_data.size(0) # 8732
output = torch.zeros(num, self.num_classes, self.top_k, 5)
conf_preds = conf_data.view(num, num_priors,
self.num_classes).transpose(2, 1)
# Decode predictions into bboxes.
for i in range(num):
decoded_boxes = decode(loc_data[i], prior_data, self.variance)
# For each class, perform nms
conf_scores = conf_preds[i].clone()
for cl in range(1, self.num_classes):
c_mask = conf_scores[cl].gt(self.conf_thresh)
scores = conf_scores[cl][c_mask]
if scores.size(0) == 0:
continue
l_mask = c_mask.unsqueeze(1).expand_as(decoded_boxes)
boxes = decoded_boxes[l_mask].view(-1, 4)
# idx of highest scoring and non-overlapping boxes per class
ids = nms(boxes, scores, self.nms_thresh)
if len(ids) < self.top_k:
output[i, cl, :len(ids)] = torch.cat((scores[ids].unsqueeze(1), boxes[ids]), 1)
else:
output[i, cl, :self.top_k] = torch.cat((scores[ids[:self.top_k]].unsqueeze(1),
boxes[ids[:self.top_k]]), 1)
flt = output.contiguous().view(num, -1, 5)
_, idx = flt[:, :, 0].sort(1, descending=True)
_, rank = idx.sort(1)
flt[(rank < self.top_k).unsqueeze(-1).expand_as(flt)].fill_(0)
return output
if __name__ == '__main__':
from options.detection.SSD.train_options import cfg
detect = Detect(num_classes=cfg['DATA']['NUM_CLASSES'],
top_k=cfg['TEST']['TOP_K'],
conf_thresh=cfg['TEST']['CONF_THRESH'],
nms_thresh=cfg['TEST']['NMS_THRESH'])
loc_data = torch.randn(16, 8732, 4)
conf_data = torch.randn(16, 8732, 21)
prior_data = torch.randn(8732, 4)
out = detect.forward(loc_data, conf_data, prior_data)
print('Detect output shape:', out.shape)结果
Detect output shape: torch.size([16, 81, 150, 5])使用此模型的评估结果,未精细调节参数以及精度
模型评估VOC结果
Network: ssd
backbone: vgg+add_extras
loss: cls(cross_entropy_loss)+reg(smooth_l1_loss)
dataset: voc
batch_size: 16
optim: SGD
lr: 0.001
scheduler: adjust_learning_rate
epoch: 115| epochs | batch norm | Mean AP (%) | Download Baidu yun | Key |
|---|---|---|---|---|
| 115 | False | 75.4 | https://pan.baidu.com/s/1WfE58NdTtTo4XtH4_bWdew | xwaw |
| 115 | True | 76.2 | https://pan.baidu.com/s/1zw_EeVs6OlwkbgoRrNifMA | 2xzk |
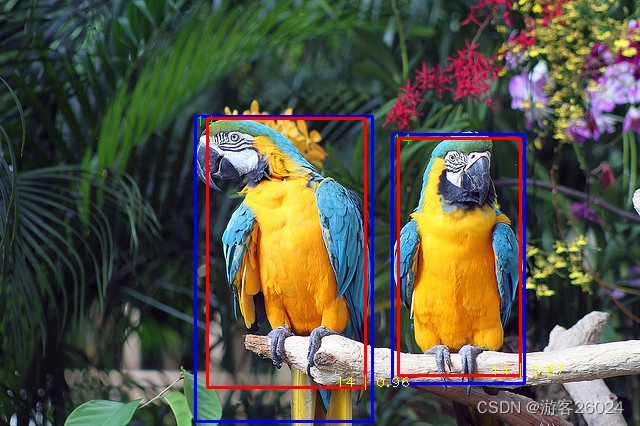
模型voc可视化结果

模型评估COCO结果
Network: ssd
backbone: vgg+add_extras
loss: cls(cross_entropy_loss)+reg(smooth_l1_loss)
dataset: coco
batch_size: 16
optim: SGD
lr: 0.001
scheduler: adjust_learning_rate
epoch: 55| epochs | batch norm | IoU=0.5 AP(%) | Download Baidu yun | Key |
|---|---|---|---|---|
| 55 | False | 38.0 | https://pan.baidu.com/s/1r9mzN6EXsYfQChz9QE932w | j6wn |
| 55 | True | 37.7 | https://pan.baidu.com/s/18pKs05u5osoXdoMpj5rFWQ | 7i64 |
模型COCO可视化结果
若想知道更多代码详情,请翻看我的gitHub!!
下一话
参考文献