自动驾驶感知算法实战专栏:https://blog.csdn.net/charmve/category_12097938.html
目录
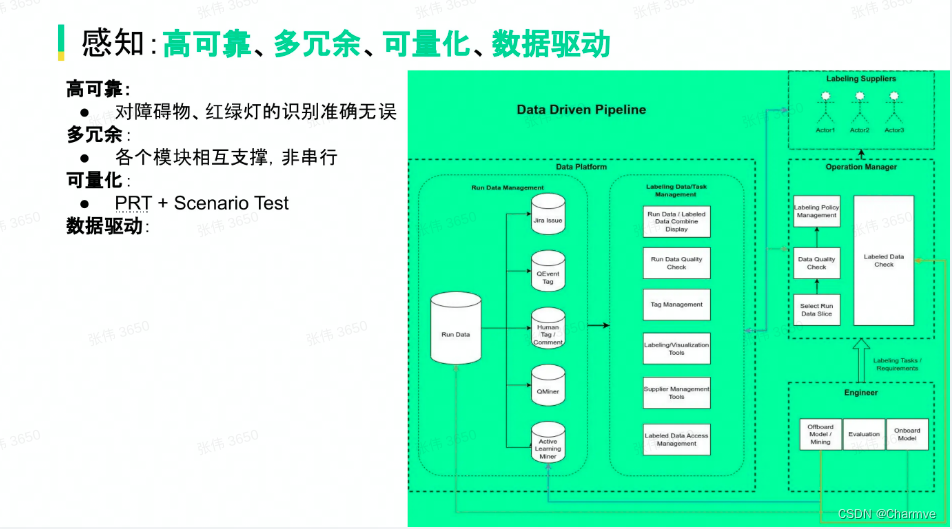
- 高可靠:对障碍物、红绿灯的识别精度有保证
- 多冗余:各个模块相互支撑、非串行
- 可量化:PRT、仿真场景测试、Profiling
- 数据驱动(全流程闭环)
「超融合」感知方案
专注在Robobus市场的轻舟智航,也开始了L2城市NOA的布局。仔细看了下他们的技术方案,轻舟的多传感器时序穿插融合很有特点,官方称之为「超融合」感知方案。
多传感器的融合方案,目前行业主流的方式包括:前融合、中融合和后融合。
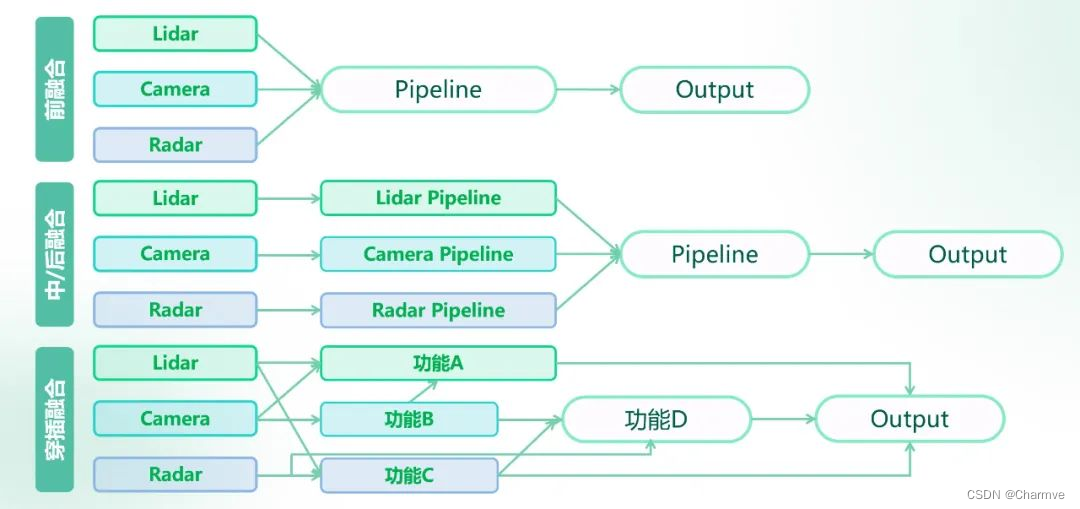
前融合属于数据级融合,基于多种传感器的原始数据,更早融合能够保留数据关联性,减少数据缺失。难点是:视觉数据和激光雷达的点云是异构数据&#x