目录
在之前的人脸检测中,我们使用了预训练过的检测器,从而让人脸检测和人员检测等功能变得触手可及。但事实上,我们还需要处理和检测其他很多具体的物体,所以我们应该产生自己的分类器。
有许多流行的方法,本文中,将使用作者提供的方法:依赖于支持向量机和BoW技术。
【原书:OpenCV 4计算机视觉 Python语言实现(原书第三版) 作者:Joseph Howse】
一、概念
- 理解支持向量机:
给定有标记的训练数据,支持向量机通过寻找最优超平面来学习分类数据。简单地说,该超平面是对不同标记数据进行最大限度划分的平面。 - 理解 BoW:
BoW(词袋)是一种技术,最初属于语言分析和信息检索领域,通过BoW可以给一系列文档中的每个单词指定权重或者计数,然后用这些计数的向量表示这些文档,从而忽略它的单词顺序和语法。
例如:
文档1: I like OpenCV and I like Python
文档2: I like C++ and Python
文档3: I don't like artichokes
利用这3个文档,我们可以构建一个字典,其值如下:
{ I:4, like:4, OpenCV:1, and:2, Python:2, C++:1, don't:1, artichokes:1 }
那么,上述三个句子的向量表示如下:
[2, 2, 1, 1, 1, 0, 0, 0]
[1, 1, 0, 1, 1, 1, 0, 0]
[1, 1, 0, 0, 0, 0, 1, 1]
可以将这些向量概念化为文档的直方图表示,或者概念化为用来训练分类器的描述符向量。
二、固定大小的滑动窗口
接下来,我们以训练汽车检测器为例:
流程:
- 【1】要训练任何类型的分类器,我们必须先创建或者获取训练数据集。数据集必须包含代表汽车的正样例,以及代表检测器在搜索汽车时可能遇到的其他物体(非汽车)的负样例。
我们打算使用一个固定大小的滑动窗口,因此重要的是训练样本要遵循固定的大小,并且为了框住没有太多背景的汽车,应紧密裁剪正样例。
如果我们要自己组建完成汽车图像的数据集(尽管这是完全可行的),但会非常耗时。为避免重新发明车轮——或者整个汽车——我们可以利用现成的数据集:
· 汽车检测UIUC图像数据集:https://cogcomp.seas.upenn.edu/Data/Car/
(无法下载的百度或者CSDN搜索都有)
示例将使用UIUC数据集。 - 【2】下载UIUC数据集后,将其解压到某个文件夹,我们称该文件夹为<project_path>。现在,解压数据应该位于<project_path>/CarData。具体来说,我们将使用<project_path>/CarData/TrainImages和<project_path>/CarData/TestImages中的一些图像。
- 【3】同样在<project_path>中,创建一个【任意名】.py文件,从而开始编写脚本。
- 【4】运行以下代码,查看同目录下是否存在CarData文件夹:
import cv2 import numpy as np import os if not os.path.isdir('CarData'): print('CarData folder not found. Please download and unzip ' 'http://l2r.cs.uiuc.edu/~cogcomp/Data/Car/CarData.tar.gz ' 'or https://github.com/gcr/arc-evaluator/raw/master/CarData.tar.gz ' 'into the same folder as this script.') exit(1)若脚本不打印任何内容,则表示一切正常。
-
【5】接下来,再脚本中定义以下常量:
BOW_NUM_TRAINING_SAMPLES_PER_CLASS = 10 SVM_NUM_TRAINING_SAMPLES_PER_CLASS = 100我们的分类器有两个训练阶段:一、用于BoW词表,将使用大量图像作为样本。二、用于支持向量机,将使用大量BoW描述符向量作为样本。
在每个阶段,还可以为两个类(汽车和非汽车)定义不同数量的训练样本。 -
【6】使用cv2.SIFT提取描述符,并使用cv2.FlannBasedMatcher匹配这些描述符
sift = cv2.SIFT_create() FLANN_INDEX_KDTREE = 1 index_params = dict(algorithm=FLANN_INDEX_KDTREE, trees=5) search_params = {} flann = cv2.FlannBasedMatcher(index_params, search_params)(SIFT 和 FLANN 可翻看之前的笔记文章)
-
【7】OpenCV提供了名为cv2.BOWKMeansTrainer的类来训练BoW词表,还提供了名为cv2.BOWImgDescriptorExtractor的类来将某种底层描述符(在我们的示例中是SIFT描述符)转换为BoW描述符。我们用下面的代码初始化这些对象:
bow_kmeans_trainer = cv2.BOWKMeansTrainer(40) bow_extractor = cv2.BOWImgDescriptorExtractor(sift, flann)在初始化cv2.BOWKMeansTrainer时,必须指定聚类数(在本示例中是40)。在初始化cv2.BOWImgDescriptorExtractor时,必须指定描述符提取器和描述符匹配器(在本示例中分别是之前创建的cv2.SIFT对象和cv2.FlannBasedMatcher对象)。
-
【8】要训练BoW词表,需要根据各种汽车和非汽车图像提供SIFT描述符的样本。我们将从CarData/TrainImages子文件夹加载图像,其中包含名为pos-x.pgm的正(汽车)图像,以及名为neg-x.pgm的负(非汽车)图像,其中x是从1开始的数字。我们编写以下实用函数来返回到第i个正的和负的训练图像的一对路径,其中i是一个从0开始的数字:
def get_pos_and_neg_paths(i): pos_path = 'CarData/TrainImages/pos-%d.pgm' % (i+1) neg_path = 'CarData/TrainImages/neg-%d.pgm' % (i+1) return pos_path, neg_path -
【9】对于每个训练样本的路径,我们需要加载图像、提取SIFT描述符并把描述符添加到BoW训练器中。我们编写另一个实用函数来精确地实现这一任务:
def add_sample(path): img = cv2.imread(path, cv2.IMREAD_GRAYSCALE) keypoints, descriptors = sift.detectAndCompute(img, None) if descriptors is not None: bow_kmeans_trainer.add(descriptors)
- 【10】在这一阶段,我们已经有了训练BoW词表所需的一切。我们读取每个类(汽车作为正类,非汽车作为负类)的一些图像,并添加到训练集:
for i in range(BOW_NUM_TRAINING_SAMPLES_PER_CLASS): pos_path, neg_path = get_pos_and_neg_paths(i) add_sample(pos_path) add_sample(neg_path) - 【11】既然已经组建好了训练集,我们将调用词表训练器的cluster方法,执行k均值分类并返回词表。把这个词表分配给BoW描述符提取器:
voc = bow_kmeans_trainer.cluster() bow_extractor.setVocabulary(voc)我们前面使用SIFT描述符提取器和FLANN匹配器初始化BoW描述符提取器。现在,我们也给BoW描述符提取器一个词表,这个词表是我们用SIFT描述符样本训练的。在这一阶段,BoW 描述符提取器拥有了从高斯差分(Diference of Gaussian,DoG)特征提取BoW描述符所需要的一切。(因为cv2.SIFT检测DoG特征并提取SIFT描述符)
- 【12】接下来,我们将声明另一个实用函数,接受图像并返回由BoW描述符提取器计算的描述符向量。这涉及图像的DoG特征提取以及基于DoG特征的BoW描述符向量的计算:
def extract_bow_descriptors(img): features = sift.detect(img) return bow_extractor.compute(img, features) - 【13】准备组建包含BoW描述符样本的另一个训练集。我们创建两个数组来容纳训练数据和标签,并用BoW描述符提取器生成的描述符填充这两个数组。我们将每个描述符向量标记为表示正样本的1或表示负样本的 -1,代码块如下:
(如果希望训练分类器来区分多个正类,只需要简单地添加带有标签的其他描述符。例如,我们可以训练一个分类器,它使用标签1表示汽车,2表示人,-1表示背景。没有要求必须有负类或背景类,但是,如果没有负类或背景类,分类器将假定所有内容都属于正类)training_data = [] training_labels = [] for i in range(SVM_NUM_TRAINING_SAMPLES_PER_CLASS): pos_path, neg_path = get_pos_and_neg_paths(i) pos_img = cv2.imread(pos_path, cv2.IMREAD_GRAYSCALE) pos_descriptors = extract_bow_descriptors(pos_img) if pos_descriptors is not None: training_data.extend(pos_descriptors) training_labels.append(1) neg_img = cv2.imread(neg_path, cv2.IMREAD_GRAYSCALE) neg_descriptors = extract_bow_descriptors(neg_img) if neg_descriptors is not None: training_data.extend(neg_descriptors) training_labels.append(-1) - 【14】OpenCV提供了名为cv2.ml_SVM的类,代表支持向量机。我们创建一个支持向量机,并用之前组建的数据和标签对其进行训练,如下所示:
svm = cv2.ml.SVM_create() svm.train(np.array(training_data), cv2.ml.ROW_SAMPLE, np.array(training_labels)) - 【15】最后,我们准备通过对不在训练集中的一些图像进行分类来测试支持向量机。我们将遍历测试图像的路径列表。对于每个路径,加载图像、提取BoW描述符,并获得SVM的预测或分类结果,根据之前使用的训练标签,它将是1.0(汽车)或-1.0(非汽车)。我们将在图像上绘制文本以显示分类结果,并在窗口中显示图像。
for test_img_path in ['CarData/TestImages/test-0.pgm', 'CarData/TestImages/test-1.pgm', 'C:/MyOpenCV/cascades/woodcutters.jpg', 'E:/115.jpeg']: img = cv2.imread(test_img_path) gray_img = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) descriptors = extract_bow_descriptors(gray_img) prediction = svm.predict(descriptors) if prediction[1][0][0] == 1.0: text = 'car' color = (0, 255, 0) else: text = 'not car' color = (0, 0, 255) cv2.putText(img, text, (10, 30), cv2.FONT_HERSHEY_SIMPLEX, 1, color, 2, cv2.LINE_AA) cv2.imshow(test_img_path, img) cv2.waitKey(0)
代码编写
import cv2
import numpy as np
import os
if not os.path.isdir('CarData'):
print('CarData folder not found. Please download and unzip '
'http://l2r.cs.uiuc.edu/~cogcomp/Data/Car/CarData.tar.gz '
'or https://github.com/gcr/arc-evaluator/raw/master/CarData.tar.gz '
'into the same folder as this script.')
exit(1)
BOW_NUM_TRAINING_SAMPLES_PER_CLASS = 10
SVM_NUM_TRAINING_SAMPLES_PER_CLASS = 100
sift = cv2.SIFT_create()
FLANN_INDEX_KDTREE = 1
index_params = dict(algorithm=FLANN_INDEX_KDTREE, trees=5)
search_params = {}
flann = cv2.FlannBasedMatcher(index_params, search_params)
bow_kmeans_trainer = cv2.BOWKMeansTrainer(40)
bow_extractor = cv2.BOWImgDescriptorExtractor(sift, flann)
def get_pos_and_neg_paths(i):
pos_path = 'CarData/TrainImages/pos-%d.pgm' % (i+1)
neg_path = 'CarData/TrainImages/neg-%d.pgm' % (i+1)
return pos_path, neg_path
def add_sample(path):
img = cv2.imread(path, cv2.IMREAD_GRAYSCALE)
keypoints, descriptors = sift.detectAndCompute(img, None)
if descriptors is not None:
bow_kmeans_trainer.add(descriptors)
for i in range(BOW_NUM_TRAINING_SAMPLES_PER_CLASS):
pos_path, neg_path = get_pos_and_neg_paths(i)
add_sample(pos_path)
add_sample(neg_path)
voc = bow_kmeans_trainer.cluster()
bow_extractor.setVocabulary(voc)
def extract_bow_descriptors(img):
features = sift.detect(img)
return bow_extractor.compute(img, features)
training_data = []
training_labels = []
for i in range(SVM_NUM_TRAINING_SAMPLES_PER_CLASS):
pos_path, neg_path = get_pos_and_neg_paths(i)
pos_img = cv2.imread(pos_path, cv2.IMREAD_GRAYSCALE)
pos_descriptors = extract_bow_descriptors(pos_img)
if pos_descriptors is not None:
training_data.extend(pos_descriptors)
training_labels.append(1)
neg_img = cv2.imread(neg_path, cv2.IMREAD_GRAYSCALE)
neg_descriptors = extract_bow_descriptors(neg_img)
if neg_descriptors is not None:
training_data.extend(neg_descriptors)
training_labels.append(-1)
svm = cv2.ml.SVM_create()
svm.train(np.array(training_data), cv2.ml.ROW_SAMPLE,
np.array(training_labels))
for test_img_path in ['CarData/TestImages/test-0.pgm',
'CarData/TestImages/test-1.pgm',
'C:/MyOpenCV/cascades/woodcutters.jpg',
'E:/115.jpeg']:
img = cv2.imread(test_img_path)
gray_img = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
descriptors = extract_bow_descriptors(gray_img)
prediction = svm.predict(descriptors)
if prediction[1][0][0] == 1.0:
text = 'car'
color = (0, 255, 0)
else:
text = 'not car'
color = (0, 0, 255)
cv2.putText(img, text, (10, 30), cv2.FONT_HERSHEY_SIMPLEX, 1,
color, 2, cv2.LINE_AA)
cv2.imshow(test_img_path, img)
cv2.waitKey(0)4张图像的测试结果:

目前,我们使用了SIFT、BoW 和 支持向量机训练了一个分类器,以区分两个类:汽车和非汽车。我们已将该分类器应用于整个图像,下个步骤是应用滑动窗口技术,将分类结果缩小到图像的特定区域。
三、支持向量机与滑动窗口相结合
通过把支持向量机(SVM)分类器与滑动窗口技术和图像金字塔相结合,我们可以实现下列改进:
- 检测图像中同类型的多个物体。
- 确定图像中检测到的每个物体的位置和大小。
我们将采用以下方法:
(1)取图像的一个区域,对其进行分类,按照预定义的步长把窗口移动到右侧。当到达图像最右端时,将x坐标重置为0,向下移动一步,重复整个过程。
(2)在每一步,使用经BoW训练的SVM执行分类。
(3)根据SVM,持续跟踪正检测的所有窗口。
(4)在对完整图像中每个窗口分类之后,缩小图像,并利用滑动窗口重复整个过程。
因此,我们使用的是图像金字塔。继续缩小并分类直到到达最小尺度。
同时,我们将使用NMS过滤结果,NMS将依赖于Malisiewicz和Rosebrock 的实现,实现的副本在GitHub中:Learning-OpenCV-4-Computer-Vision-with-Python-Third-Edition/non_max_suppression.py at master · PacktPublishing/Learning-OpenCV-4-Computer-Vision-with-Python-Third-Edition · GitHub
该脚本提供了一个具有以下签名的函数:
def non_max_suppression_fast(boxes, overlapThresh):
该函数接受包含矩形坐标和得分的NumPy数组作为第1个参数。如果有N个矩形,数组的形状就是Nx5。对于索引 i 处的给定矩形,数组中的值有以下含义:
- boxes[i][0]:最左边的x坐标
- boxes[i][1]:顶端的y坐标
- boxes[i][2]:最右边的x坐标
- boxes[i][3]:底部的y坐标
- boxes[i][4]:得分,分数越高代表矩形是正确检测结果的置信度越大
该函数接受一个阈值(代表矩形之间重叠的最大比例)作为第2个参数。如果两个矩形的重叠比例大于这个参数,将会过滤掉较低的得分结果。最后,该函数将返回由剩余矩形组成的数组。
流程
(该脚本为上一个脚本的修改与扩展)
- 【1】为 NMS 函数添加一个新的 import 语句:
import cv2 import numpy as np import os from non_max_suppression import non_max_suppression_fast as nms - 【2】在脚本开始处定义一些额外的参数:
我们将使用SVM_SCORE_THRESHOLD作为阈值来区分正窗口和负窗口,使用NMS_OVERLAP_THRESHOLD作为NMS步骤中可接受的最大重叠比例,这里,我们随机选择15%,所以将剔除重叠超过该比例的窗口。在用支持向量机做实验时,可以根据自己的喜好调整这些参数,直到找到能在应用程序中产生最佳结果的值。BOW_NUM_TRAINING_SAMPLES_PER_CLASS = 10 SVM_NUM_TRAINING_SAMPLES_PER_CLASS = 100 SVM_SCORE_THRESHOLD = 1.8 NMS_OVERLAP_THRESHOLD = 0.15 - 【3】把k均值聚类数从40个减少到12个(根据实验随机选择的一个数)
bow_kmeans_trainer = cv2.BOWKMeansTrainer(12) - 【4】同时调整SVM的参数
svm = cv2.ml.SVM_create() svm.setType(cv2.ml.SVM_C_SVC) svm.setC(50) svm.train(np.array(training_data), cv2.ml.ROW_SAMPLE, np.array(training_labels)) - 【5】在完成训练SVM的代码之后,我们想再添加两个辅助函数,其中一个用于生成图像金字塔层,另一个用于基于滑动窗口技术生成感兴趣的区域。除了添加这些辅助函数之外,我们还需要以不同的方式处理测试图像,以便利用滑动窗口和NMS。以下步骤将介绍这些更改
- 【6】首先,我们来看处理图像金字塔的辅助函数
def pyramid(img, scale_factor=1.25, min_size=(200, 80), max_size=(600, 600)): h, w = img.shape min_w, min_h = min_size max_w, max_h = max_size while w >= min_w and h >= min_h: if w <= max_w and h <= max_h: yield img w /= scale_factor h /= scale_factor img = cv2.resize(img, (int(w), int(h)), interpolation=cv2.INTER_AREA)此函数将获取一幅图像并生成一系列调整大小的图像版本,但有最大和最小限制。
- 【7】接下来是基于滑动窗口技术生成感兴趣区域的函数。此函数如下面的代码块所示:
这段代码机制很简单:给定一幅图像,返回左上角坐标和代表下一个窗口的子图像。连续的窗口通过任意大小的步长从左到右移动,直到到达图像的最右端,并从上到下移动,直到到达图像的底端。def sliding_window(img, step=20, window_size=(100, 40)): img_h, img_w = img.shape window_w, window_h = window_size for y in range(0, img_w, step): for x in range(0, img_h, step): roi = img[y:y+window_h, x:x+window_w] roi_h, roi_w = roi.shape if roi_w == window_w and roi_h == window_h: yield (x, y, roi) - 【8】现在,我们来考虑测试图像的处理。和之前版本的脚本一样,循环遍历测试图像路径列表,以加载和处理每幅图像。循环的开始部分没有变化。下面是其内容:
for test_img_path in ['CarData/TestImages/test-0.pgm', 'CarData/TestImages/test-1.pgm', 'C:/MyOpenCV/cascades/woodcutters.jpg', 'E:/115.jpeg']: img = cv2.imread(test_img_path) gray_img = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) - 【9】对于每幅测试图像,遍历金字塔层;对于每一金字塔层,遍历滑动窗口的位置;对于每个窗口或者感兴趣区域(Region Of Interest,RO1),提取BoW描述符并使用SVM对其进行分类。如果分类产生的正检测结果超过了某个置信度阈值,就将矩形的角点坐标和置信度添加到正检测结果列表中。继前面的代码块之后,我们继续处理给定的测试图像,代码如下:
pos_rects = [] for resized in pyramid(gray_img): for x, y, roi in sliding_window(resized): descriptors = extract_bow_descriptors(roi) if descriptors is None: continue prediction = svm.predict(descriptors) if prediction[1][0][0] == 1.0: raw_prediction = svm.predict( descriptors, flags=cv2.ml.STAT_MODEL_RAW_OUTPUT) score = -raw_prediction[1][0][0] if score > SVM_SCORE_THRESHOLD: h, w = roi.shape scale = gray_img.shape[0] / float(resized.shape[0]) pos_rects.append([int(x * scale), int(y * scale), int((x+w) * scale), int((y+h) * scale), score])
我们注意到,上述代码中有一些复杂的地方:
· 为了获得支持向量机预测的置信度,我们必须使用可选标志cv2.m1.STAT_MODEL_RAN_OUTPUT来运行predict方法。然后,该方法返回一个得分作为其输出的一部分,而不是返回一个标签。这个得分可能为负,而且低的值表示置信度高。为使得分更直观并匹配NMS函数的假设(得分越高越好),我们对得分取负,这样高的值就代表了置信度高。
· 因为使用的是多层金字塔,窗口坐标没有共同的尺度。在将它们添加到正检测结果列表之前,需要将其转换到共同的尺度,即原始图像的尺度。
到目前为止,我们已经在不同的尺度和位置进行了汽车检测,结果就是可以得到一个检测到的汽车矩形列表(包括矩形坐标和得分),预计在矩形列表中会有很多重叠内容。 - 【10】现在,调用NMS函数,以便在重叠的情况下,选出得分最高的矩形,如下所示:
pos_rects = nms(np.array(pos_rects), NMS_OVERLAP_THRESHOLD) - 【11】现在,把下列内循环添加到代码中,绘制矩形及其得分:
for x0, y0, x1, y1, score in pos_rects: cv2.rectangle(img, (int(x0), int(y0)), (int(x1), int(y1)), (0, 255, 255), 2) text = '%.2f' % score cv2.putText(img, text, (int(x0), int(y0) - 20), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 255), 2) - 【12】显示图像
代码编写
import cv2
import numpy as np
import os
from non_max_suppression import non_max_suppression_fast as nms
if not os.path.isdir('CarData'):
print('CarData folder not found. Please download and unzip '
'http://l2r.cs.uiuc.edu/~cogcomp/Data/Car/CarData.tar.gz '
'or https://github.com/gcr/arc-evaluator/raw/master/CarData.tar.gz '
'into the same folder as this script.')
exit(1)
BOW_NUM_TRAINING_SAMPLES_PER_CLASS = 10
SVM_NUM_TRAINING_SAMPLES_PER_CLASS = 100
SVM_SCORE_THRESHOLD = 1.8
NMS_OVERLAP_THRESHOLD = 0.15
sift = cv2.SIFT_create()
FLANN_INDEX_KDTREE = 1
index_params = dict(algorithm=FLANN_INDEX_KDTREE, trees=5)
search_params = {}
flann = cv2.FlannBasedMatcher(index_params, search_params)
bow_kmeans_trainer = cv2.BOWKMeansTrainer(12)
bow_extractor = cv2.BOWImgDescriptorExtractor(sift, flann)
def get_pos_and_neg_paths(i):
pos_path = 'CarData/TrainImages/pos-%d.pgm' % (i+1)
neg_path = 'CarData/TrainImages/neg-%d.pgm' % (i+1)
return pos_path, neg_path
def add_sample(path):
img = cv2.imread(path, cv2.IMREAD_GRAYSCALE)
keypoints, descriptors = sift.detectAndCompute(img, None)
if descriptors is not None:
bow_kmeans_trainer.add(descriptors)
for i in range(BOW_NUM_TRAINING_SAMPLES_PER_CLASS):
pos_path, neg_path = get_pos_and_neg_paths(i)
add_sample(pos_path)
add_sample(neg_path)
voc = bow_kmeans_trainer.cluster()
bow_extractor.setVocabulary(voc)
def extract_bow_descriptors(img):
features = sift.detect(img)
return bow_extractor.compute(img, features)
training_data = []
training_labels = []
for i in range(SVM_NUM_TRAINING_SAMPLES_PER_CLASS):
pos_path, neg_path = get_pos_and_neg_paths(i)
pos_img = cv2.imread(pos_path, cv2.IMREAD_GRAYSCALE)
pos_descriptors = extract_bow_descriptors(pos_img)
if pos_descriptors is not None:
training_data.extend(pos_descriptors)
training_labels.append(1)
neg_img = cv2.imread(neg_path, cv2.IMREAD_GRAYSCALE)
neg_descriptors = extract_bow_descriptors(neg_img)
if neg_descriptors is not None:
training_data.extend(neg_descriptors)
training_labels.append(-1)
svm = cv2.ml.SVM_create()
svm.setType(cv2.ml.SVM_C_SVC)
svm.setC(50)
svm.train(np.array(training_data), cv2.ml.ROW_SAMPLE,
np.array(training_labels))
def pyramid(img, scale_factor=1.25, min_size=(200, 80),
max_size=(600, 600)):
h, w = img.shape[:2]
min_w, min_h = min_size
max_w, max_h = max_size
while w >= min_w and h >= min_h:
if w <= max_w and h <= max_h:
yield img
w /= scale_factor
h /= scale_factor
img = cv2.resize(img, (int(w), int(h)),
interpolation=cv2.INTER_AREA)
def sliding_window(img, step=20, window_size=(100, 40)):
img_h, img_w = img.shape
window_w, window_h = window_size
for y in range(0, img_w, step):
for x in range(0, img_h, step):
roi = img[y:y+window_h, x:x+window_w]
roi_h, roi_w = roi.shape
if roi_w == window_w and roi_h == window_h:
yield (x, y, roi)
for test_img_path in ['CarData/TestImages/test-0.pgm',
'CarData/TestImages/test-1.pgm',
'C:/MyOpenCV/cascades/woodcutters.jpg',
'E:/115.jpeg']:
img = cv2.imread(test_img_path)
gray_img = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
pos_rects = []
for resized in pyramid(gray_img):
for x, y, roi in sliding_window(resized):
descriptors = extract_bow_descriptors(roi)
if descriptors is None:
continue
prediction = svm.predict(descriptors)
if prediction[1][0][0] == 1.0:
raw_prediction = svm.predict(
descriptors, flags=cv2.ml.STAT_MODEL_RAW_OUTPUT)
score = -raw_prediction[1][0][0]
if score > SVM_SCORE_THRESHOLD:
h, w = roi.shape
scale = gray_img.shape[0] / float(resized.shape[0])
pos_rects.append([int(x * scale),
int(y * scale),
int((x+w) * scale),
int((y+h) * scale),
score])
pos_rects = nms(np.array(pos_rects), NMS_OVERLAP_THRESHOLD)
for x0, y0, x1, y1, score in pos_rects:
cv2.rectangle(img, (int(x0), int(y0)), (int(x1), int(y1)),
(0, 255, 255), 2)
text = '%.2f' % score
cv2.putText(img, text, (int(x0), int(y0) - 20),
cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 255), 2)
cv2.imshow(test_img_path, img)
cv2.waitKey(0)4张图像检测结果:
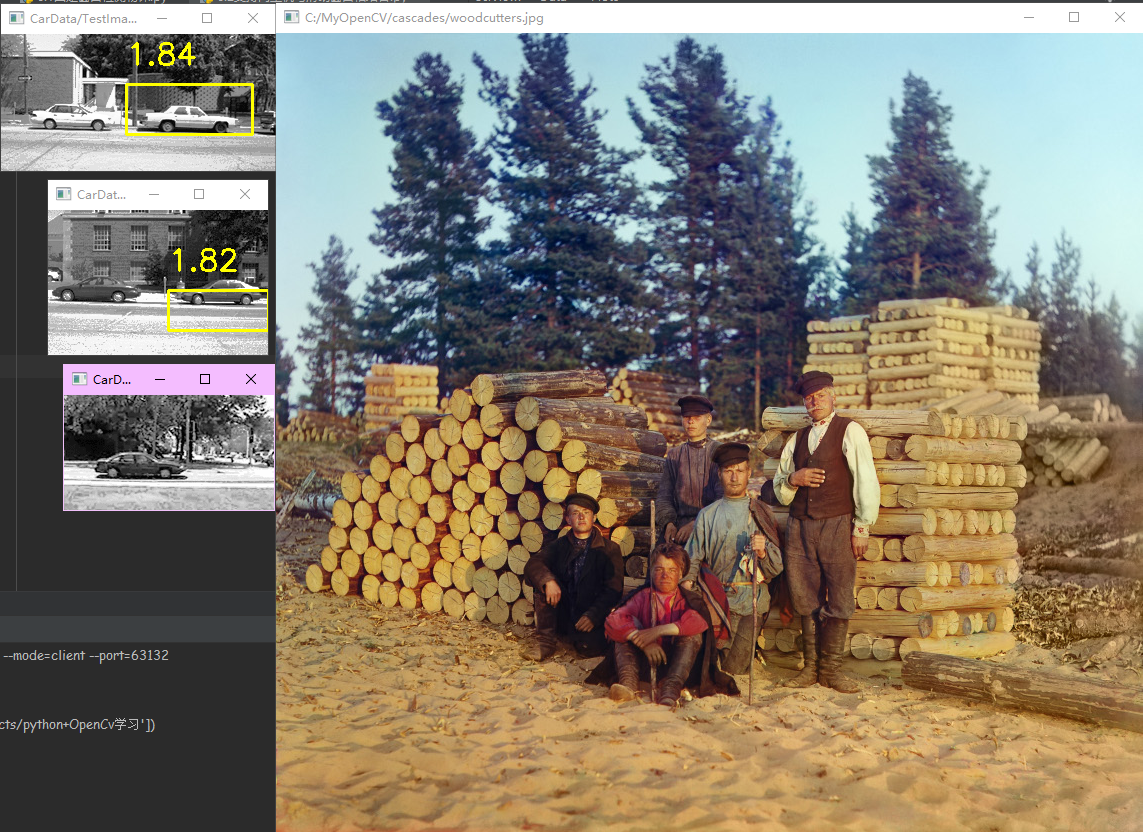
3辆汽车中,成功检测到两辆,有1辆未检测出。
(本示例中,训练集很小,但训练集越大,背景就越多样化,准确性就越高)。
四、保存并加载经过训练的支持向量机
最后一条建议:你不需要在每次使用检测器时都对其进行训练,实际上,你应该避免这样做,因为训练很慢。使用如下代码可以把训练好的SVM模型保存到XML文件:
在原脚本1处:
svm = cv2.ml.SVM_create()
svm.train(np.array(training_data), cv2.ml.ROW_SAMPLE,
np.array(training_labels))改为:
svm = cv2.ml.SVM_create()
svm.train(np.array(training_data), cv2.ml.ROW_SAMPLE,
np.array(training_labels))
svm = cv2.ml.SVM_load('my_svm.xml')加载SVM:
svm = cv2.ml.SVM_load('my_svm.xml')通常,我们需要一个脚本来训练和保存SVM模型,用其他脚本加载并使用SVM来解决各种检测问题。
注意:有老版本的加载方式可能为:
svm = cv2.ml.SVM_create()
svm.load('my_svm.xml')
结果会报错:error: (-215:Assertion failed) samples.cols == var_count && samples.type() == CV_32F in function 'cv::ml::SVMImpl::predict'
使用上面的加载方式即可。
【参考】:
原书:OpenCV 4计算机视觉 Python语言实现(原书第三版) 作者:Joseph Howse】