系列文章目录
提示:这里可以添加系列文章的所有文章的目录,目录需要自己手动添加
TODO:写完再整理
前言
认知有限,望大家多多包涵,有什么问题也希望能够与大家多交流,共同成长!本文先对一种低成本的动态机器人模块化电机执行器做个简单的介绍,具体内容后续再更,其他模块可以参考去我其他文章
提示:以下是本篇文章正文内容
一、简介
本文介绍了一种低成本、高性能、模块化执行机构,用于腿型机器人和其他动态机械结构
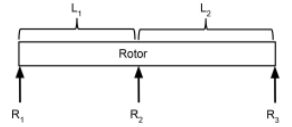
我们采取与麻省理工学院猎豹机器人一样的驱动方式:使用高扭矩密度电机和低传动比、可反向驱动的变速器,允许高带宽扭矩控制。利用这些执行器,我们建造了一个12自由度的四足机器人,大约是麻省理工学院猎豹3号机器人的60%,还有其他几个机器人平台。
.
.
二、电机执行器类型
1.力控电动电机执行器
通过设计使电机转矩密度最大化最大限度地减少寄生电机、变速箱和腿部动力学,同时降低高扭矩可以实现密度、高速、对外部冲击的鲁棒性和高带宽转矩控制[1]。这种驱动策略是最早也是最值得注意的麻省理工学院猎豹系列机器人中的腿型机器人。
在机械设计和控制方面。每个执行器只需要一个位置传感器(在电机转子处电机),没有额外的柔顺元件内置在执行机构,和相对简单的传输。转矩控制简单地通过电流控制来实现马达。
2.液压执行机构
波士顿动力公司(Boston Dynamics)的液压腿机器人[32]从“大狗”开始为现代腿机器人的性能制定标准。液压的执行机构往往具有较高的力密度和对冲击的高鲁棒性,如冲击负载分布在液压通道的大表面积上,而不是,例如几个小齿轮齿。使用液压系统的另一个重要原因,特别是对于高自由度的机器,更是相对容易增加高自由度的力。
,它是相对容易设计的高力,大功率,低惯性四肢与所有驱动质量位于车身上,使液压系统对这种类型的车辆不太有利机器人。液压执行器的效率也很低,因为动液、伺服阀内漏及压降
3.系列弹性执行机构
系列弹性执行机构(SEA)采用传统的高齿轮电机,以及在输出端添加弹簧和弹簧位移传感器[5]。接头扭矩罐通过测量弹簧挠度在输出端进行测量,并等效地测量输出端扭矩可以通过控制弹簧挠度来控制。除了允许闭环输出扭矩控制,弹簧用于将齿轮箱与执行器输出处的冲击分离。这个允许使用高传动比,而不会在碰撞时损坏齿轮。在在一些SEA实现中,弹性弹簧用来存储大量的能量,增加弹簧和电机工作时执行器的峰值功率输出在同一个方向。也许四足机器人StarlETH[3]和机器人系统的继任者ANYMal[4]是SEA在腿部机器人中应用的最好例子苏黎世ETH实验室。
弹簧挠度控制将转矩控制问题转化为位置控制问题,因此SEAs通常使用昂贵、低齿隙、高精度的传动装置,如谐波传动。由于变速器的反作用力和合规性,许多SEA实现使用三个位置传感器:一个在电机处进行换向;一个在变速器,在弹簧的输入端;一个在弹簧的输出端。这个增加一个弹簧和两个额外的位置传感器,大大增加了致动器的机械复杂性和成本,以及牺牲重量和执行机构对非动力和扭矩产生部件的体积。
三、执行电机设计
1.模块化
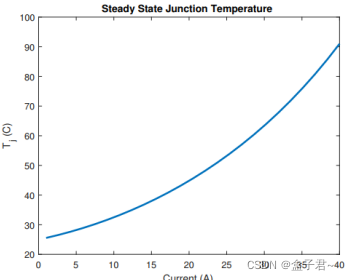
虽然麻省理工学院的猎豹使用定制的电机,优化了扭矩密度,但这里的设计充分利用了无人机和飞机用高性能无刷电机的普及,它们在国外大量生产,成本很低。这些马达已紧密集成到执行器中,该执行器还包括6:1单级行星齿轮减速器、带内置位置传感器的电机控制器和关节水平仪控制能力,输出可直接处理将四肢连接到执行器,并与简化布线

2.电控性能要求
执行器的预期用途之一是建造一个小型四足动物,具有与麻省理工学院猎豹3号机器人相似的动态能力。
小型高性能四足动物的粗略驱动要求可以是通过对猎豹3应用比例定律进行估计。猎豹3相关规格汇总在表中
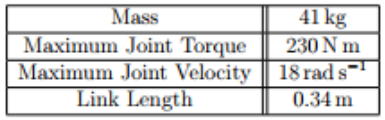
对于一只体型为猎豹3的四足动物来说,假设在尺寸,机器人的质量为9.5千克,连杆长度为0.2米。为了产生相同的地面反作用力,接头扭矩应为30牛顿米左右,缩放为ℎ4。为了达到相似的运动速度,关节角速度应按ℎ-1。这些数字作为执行机构尺寸的粗略指南,而不是确定设计目标,因为各种因素如电机可用性受到影响最终执行器和四足动物的大小。
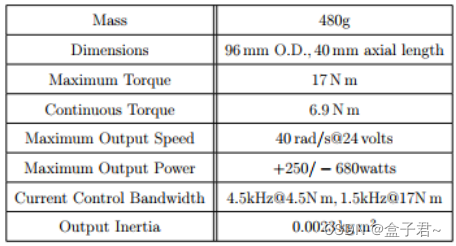
下表中总结了猎豹mini 开发的执行机构的规格
对于定位精度来说,脚的定位好于一厘米左右不太可能是关键。在猎豹3号上,我们从齿轮箱摩擦和其他影响中观察到大约10%的静态扭矩误差
3.机械设计

1、转子和定子
电机执行器使用的转子和定子从现成的无刷电机为大型RC无人机无刷电机(改造无人机的无刷电机的),该模型在外形和性能上与直接驱动腿式机器人中使用的U8电机几乎相同
大气隙直径(81 mm),叠层长度8.2毫米,以及大量极对(21)。这些特性使它特别现成电机的高扭矩密度。在操作范围内执行器,在转矩恒定的情况下,观察到电机的某些转矩饱和最大扭矩下降12%
扭矩与电流(左)和扭矩常数与电流(右)。这个电机表现出一定的饱和,最大转矩下降12%。

2、壳体和行星齿轮箱
转子和执行器输出之间是6:1行星齿轮减速器。到降低成本,所有的齿轮都是库存零件。3个行星和太阳齿轮是Misumi的可配置零件(零件号GEFHB0.5-40-5-8-W3和GEABN0.5-分别为20-8-K-4),齿圈由KKK齿轮(零件号KKK)制成硅0.5-100)。齿圈需要后加工至55 mm外径。这个齿圈压入执行器壳体的前半部分,太阳齿轮压装到转子上,过盈配合由Loctite 648高强度辅助固定胶。每个行星齿轮都有一个压入的HK0408滚针轴承进入钻孔。滚针轴承安装在精密的4毫米定位销上。这些销被压过行星齿轮架的前半部分,并伸出执行器的输出端,作为定位和扭矩传递的工具输出上的功能
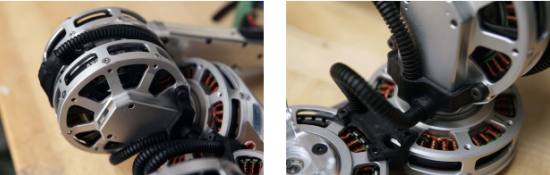
(1)执行机构中使用的无刷电机的定子(左)和转子(右)。转子已经过改装,以安装行星变速器的太阳齿轮。

(2)执行机构的横截面图。在左侧,方位突出显示红色为转子,蓝色为转子,绿色为行星齿轮架。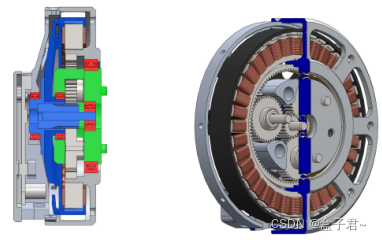
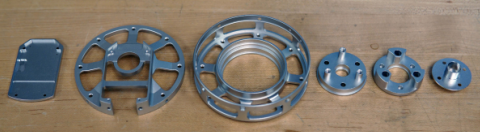
(3)壳体和行星齿轮箱的机加工部件
3、冲击设计分析
对碰撞的鲁棒性是腿机器人执行器的一个重要特征。非零冲击速度接触是不可避免的,即使控制策略难以工作。避开他们。地形的任何不确定性,机器人状态估计的任何错误,以及任何干扰都会以显著的速度造成冲击
如先前所讨论的,存在机械地减轻这些影响的策略,就像在腿或执行器上添加有意串联的弹性元件。或者,就像麻省理工学院的猎豹机器人一样,机器人的脚和腿的皮带足以防止执行器断裂。麻省理工学院猎豹,由于这些顺从的影响是足够高的频率忽略了运动控制。了解执行器的一些局限性必须经受撞击,这里做了一些简单的分析,以估计碰撞过程中的传输负载
当转子中的所有动能被转换为存储在位移中的弹性势能。此时,弹簧将因角度而移位。如果没有系统中的阻尼,因此能量是守恒的:

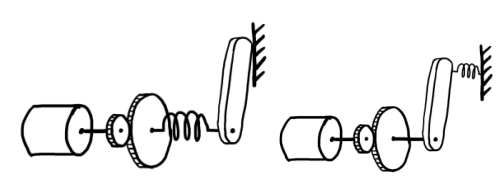
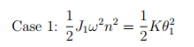
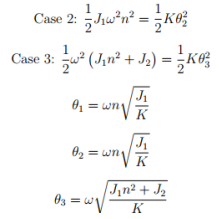
输入齿轮上的峰值扭矩由以下公式给出:
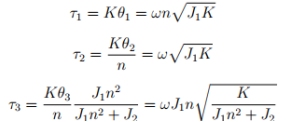
我们已经看到,在所有情况下,冲击力都随冲击速度、转子惯性平方根和刚度的平方根而变化。
对于所有这些情况,开环力控制带宽将受到转子的固有频率和串联柔度,当连杆端部是固定的。固定固有频率,解决所需弹簧常数1、2、3分别适用于情况1、情况2、情况3:
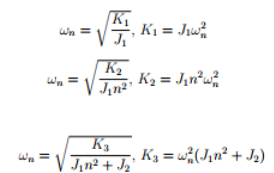
将这些s代入峰值扭矩方程:
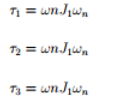
如果选择的刚度使得频率(因此开环转矩带宽)相等。这可能是直观的结果,但它是一个有用的。对机器人的撞击速度有所了解应能承受必要的力控制带宽,机器人的腿能设计和执行机构部件的尺寸,以便执行机构能够承受这些影响。
4、轴承载荷选型
一个合适的滚柱轴承本身会使执行机构的零件成本增加超过50%。相反,低成本的薄截面公制轴承仅需几美元
估计轴承负荷,以及执行机构,我们假设单个轴承没有力矩刚度,所以所有力矩输出端上的负荷由轴承上的径向负荷反应这应该是轴承内圈小角度偏转的合理假设,如在没有力矩的情况下,轴承中的接触角为0∘,因此没有力矩刚度。在这个假设下,求解轴承载荷变成了一个简单的静力学问题问题
执行器可以简化为以下示意图,带有轴承红色
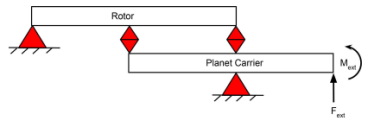
首先,看看转子上的力和力矩平衡
150 N的力作用在距执行器输出3=50 mm的距离处,产生的荷载为:
所有轴承都在安全范围内。
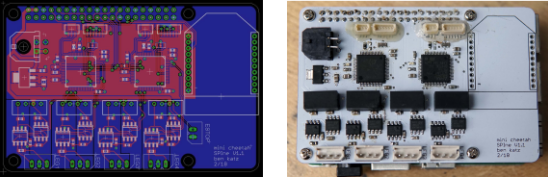
4.电机控制硬件

单个PCB包含用于电机控制、位置感测和通信的硬件。这样可以保持装配机器人所需的电线数量将这些执行器周围的噪声降到最低,并保持变频器和电机相引线与其他电子设备封闭且远离
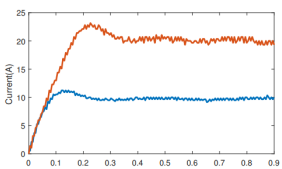
电力电子电机驱动级设计用于24伏标称输入电压和40安培峰值相电流,尽管电机的热限制限制了连续运行当前值低于该值。看到输入电压的部件都被额定为至少40V,限制元件是mosfet,因此执行器有足够的空间来承受输入电压的意外峰值。控制器接收到所需的扭矩、位置、速度、位置和速度增益超过CAN总线至4kHz#执行器,并根据当前测量值,以测量的位置、速度和估计的扭矩作出响应。对于许多需要高度通信的自由度系统带宽,可以使用多个CAN网络来保持通信带宽高-在第3章描述的四足动物中,使用了4个CAN网络;每个三自由度腿。
1、三相逆变器
任何三相电动机控制器的核心都是三相逆变器。逆变器由三个晶体管半桥组成,半桥向三个电机端子施加电压。
由于使用的电机电感非常低,大约30h,使用了相当高的开关频率和40 kHz的控制回路频率,以实现快速闭合回路电流控制,并将由PWM引起的电流纹波降至最低。
对于每一个半桥,可以估计恒定扭矩下的功耗作为传导和开关损耗的组合

其中是给定转矩的峰值相电流,是直流母线电压,是MOSFET的导通电阻,是半桥输出电压,为下降时间,ℎ为开关频率。系数√12和2来自于一个恒定扭矩对应于正弦相位电流。
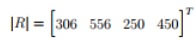
在25∘C的环境温度下,预测的稳态MOSFET逆变器的结温如图所示(稳态MOSFET温度与峰值相电流的关系)
3、逻辑电源、栅极驱动、电流传感和微控制器
电机控制、传感器测量和通信由STM32F446处理微控制器进行处理。微控制器运行一个磁场定向控制算法,以40 kHz的环路速率控制电机转矩,与FET开关同步。一个如果需要,PD位置回路将同时运行。电流通过三个中的两个使用1 mΩ低压侧电流分流器测量相位。TI DRV8302集成电路提供三相栅极驱动,电流分路放大器,buck变换器控制器为逻辑提供动力。DRV8302上的放大器被配置为增益40,电流测量范围略大于40 a
.
4、位置感测
电机控制器有一个霍尔效应数字编码器直接集成到印刷电路板。使用的特殊传感器是由AMS制造的AS5047P。名义上这是14位位置传感器,尽管实际上单个样本大约有2位他们身上有噪音。每次循环,微控制器读取位置的输出SPI上的传感器。该位置传感器用于转子的电气角度,用于换向和输出位置测量。通过跟踪时间位置传感器的输出在每次旋转时滚动,机械位置超过可跟踪转子的多次旋转。因为位置传感器是绝对的在转子上,输出位置在转子转动一圈内已知,或60∘。这使得执行器在开启时可以在视觉上非常粗略地调零。电动机用16个样本的移动平均值估计速度位置样本等效

编码器集成电路测量转子位置
四、控制算法
1.电流和转矩FOC控制
电机电流控制采用磁场定向控制(FOC)实现。利用FOC,通过DQ0变换将三相定子电流变换为与转子旋转的坐标系。这个在转子坐标系中,电机的行为大致呈线性,因此带宽很高利用离散时间线性控制技术可以很容易地实现电流控制。然后,转子框架中的电压通过反向DQ0变换被转换回静止的定子参考框架,并通过换流器。硬件能够完成电流(因此电磁扭矩)控制在4.5 kHz以上的闭环带宽
为了达到超过采样频率1/10的闭环带宽,一个采用自动调谐PI控制器,根据电机控制器自身测量的电气参数来设定电流控制器的增益。这个电机电气动力学(单极对)由以下电压描述D/Q框架中的方程
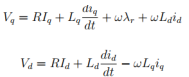
其中相电阻是直轴电感,是正交轴电感,是转子磁链,是电角速度,并且是。直接和正交轴电流。因为它是由电动机的机械动力学控制的,所以它的变化通常比电流和速度慢得多。因此,假设可以获得足够的电流控制带宽,“反电动势”在控制器设计中可以忽略,因为它只影响频率
安培和20安培步进的相电流阶跃响应,通过外部电流探头。10A电流上升时间为75秒,20A电流上升时间为110秒电机电感和电压限制。
2.位置传感器校准和线性化
开发了编码器校准和线性化程序处理执行机构组装过程中出现的几个问题:
1∙无法精确定位直径磁化位置传感器磁铁相对于转子上的磁铁。理想情况下,零编码器的位置将与转子的d轴对齐。
2∙3个电机相位的顺序不能保证尽管我们观察到它们是一致的。相序应使正q轴电流产生扭矩。编码器正旋转。
3∙编码器IC仅位于PCB上的焊盘上。因此编码器可以被放置到离旋转轴几百微米的地方。转子的。这在编码器的输出中引入了非线性。任何机械角度误差放大21倍电机)对于电角度,可能对电机换相有显著影响。
校准步骤如下:
一。为了确定电机相位的顺序,定子电压矢量为沿正方向缓慢旋转。如果位置传感器的输出增加时,相位顺序正确。如果位置传感器的输出减少,然后在固件中交换两个电机相位。
二。为了确定位置传感器的偏移量,将定子电压矢量缓慢扫描
通过电机的完全机械旋转,向前和向后,并记录由此产生的转子位置。见图2-16-1。在此期间扫掠时,转子绕组紧密跟踪定子电流矢量,这是最低能量位置。由于齿槽转矩和摩擦,有一些电流矢量角和转子角之间的跟踪误差。位置感应磁铁的直流偏移是平均角度差
三。非线性是通过测量转子系列之间的差异来测量的角和电压角,图2-16-2,减去直流偏移,并平均正向和反向旋转方向,以消除摩擦效应2-16-3号。在差异中可以观察到几个空间频率的误差:相对高频,从电机的齿槽转矩,和低频,由位置传感器非线性引起
四。为了补偿位置传感器的非线性,首先齿槽转矩效应必须被过滤掉。这是通过使用移动平均值(即加权)具有窗口的FIR滤波器,使其在齿槽处具有零增益频率。由于电机是旋转对称的,齿槽频率必须在电机的一个电周期内定期进行。如果FIR滤波器窗宽等于一个电周期,则在频率和所有整数倍的频率,所以齿槽效果应该被完全过滤掉。将此过滤器循环应用于信号产生一个误差信号,只剩下位置传感器的非线性,它可以作为一个查找表来线性化位置传感器的输出,
这种技术即使在偏离旋转轴线的0.75毫米的位置传感器位置误差下也有效。如果不加以纠正,这将导致电机转矩符号实际反转的电气位置误差。之后校准时,转矩脉动在齿槽转矩下不可测量。跑步多次测量,发现测量的偏移量可在0.0005弧度内重复在转子上。
3.电机执行机构参数配置和通信
命令和传感器信息在每个执行器和更高级别之间发送控制器(可以是计算机、另一个微控制器、FPGA等)通过CAN总线。选择CAN是因为它的电气稳定性、菊花链能力,以及易于植入嵌入式设备,如每个逆变器上的微控制器。虽然CAN不是一个特别高速的接口,具有最高的数据速率。该协议有许多内置功能,使网络具有多个执行机构简单可靠。
每个电机接收5个命令:位置设定点;速度设定点;位置增益;速度增益;转矩,并用3个测量值回复:角度;角度速度;和估计的扭矩。估计扭矩计算为·,并且如果电机以高速旋转并变成电压限制。内置的PD定位功能允许PD循环关闭时的带宽远远高于高级控制器的能力连接到所有电机,因为它与电流控制回路同步运行在40千赫。此功能可能对高速腿部轨迹跟踪等任务有用在一个有腿机器人的摆动阶段。命令和测量是按比例缩放,以便能够有效地将它们打包到具有8个字节的can帧中(表2.3)命令和6字节的测量。再加上44位的CAN每个CAN标准帧的开销,这意味着每组命令总共有200位以及CAN总线上每个执行器的测量值。以1 Mbps的总线速度理论上允许执行器的通信速率为5kHz,但实际上100%的总线利用率具有挑战性。但实际上,我们已经运行了三自由度网络在1.2千赫没有问题
控制器有一个串行控制台接口,通过该接口可以对其进行配置和测试。通过这个接口,像CAN这样的参数可以识别控制器接收命令到,控制器发送命令到的CAN ID,当前控制带宽,转矩限制,以及CAN超时周期。最后一个功能是安全测量,以便在没有通过用户可配置的CAN总线接收到新数据时在一段时间内,电流设定值归零,因此电机停止产生转矩。串行接口也用于运行编码器校准程序以及设定执行器输出的原点。
4.执行机构测试和特性
稳态性能
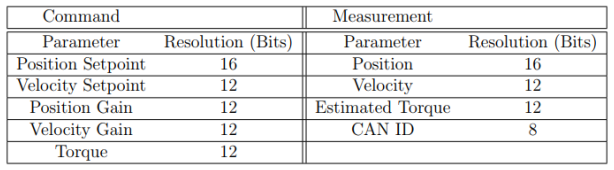
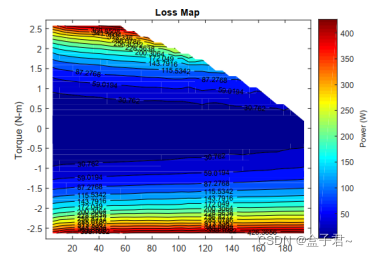
执行器模块大部分工作空间的稳态性能在定制的四象限电机测功机上进行了表征测量轴扭矩,轴速度,输入电压和电流到执行器。对不带6:1行星齿轮箱的电机和控制器进行了全面测试工作范围,但是测功机的扭矩限制(11 N-m)限制了整个执行机构的齿轮减速测试。在执行器的22V直流输入下进行测量
电机的详细稳态性能如下由以下性能图描述
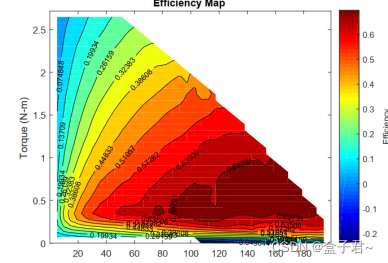
显示了将电力转换为机械功率,即每1象限··(正速度,正速度扭矩)工作点。
扭矩精度
执行器没有输出扭矩传感器,并且不执行闭环输出扭矩控制。因此,转子惯性、齿轮和轴承摩擦以及齿槽转矩在输出扭矩中引入误差。虽然高扭矩精度不是一个设计执行器的目标是,扭矩精度的完整性已得到表征。
观察到齿轮和轴承摩擦取决于扭矩和旋转方向,在执行机构的工作范围内可忽略速度依赖性。执行机构的静摩擦为0.09 N m,扭矩为0.04 N m/N m 齿轮和轴承摩擦由方程式2.27很好地模拟。
热分析
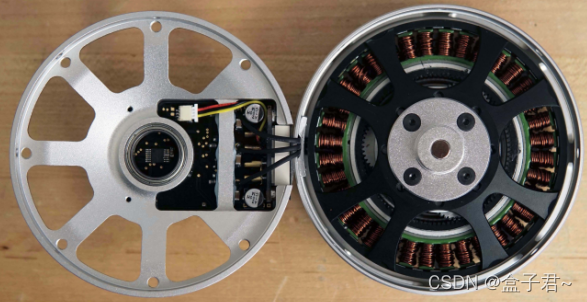
确定电机的稳态和瞬态转矩极限用热成像仪记录了逆变器、绕组和逆变器的温度对于几个当前级别。这些数据表明绕组的热阻1.23 K/W,热质量32 J/K,以保持绕组温度低于100∘C,在环境条件下,平均功耗应保持在60瓦以下温度为25∘C。对应于15.4峰值相位安培,包括30%这种温升预期的绕组电阻增加,相应地在执行器输出端为6.9 N m。


5A(左)和12.5A(右)相电流下的热成像。由于温度颜色映射自动缩放,图像之间的颜色不对应。
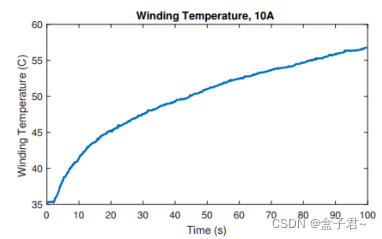
步进期间的绕组温度。
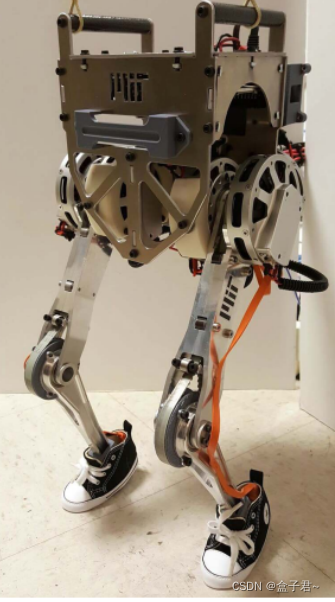
五、四足机器人平台搭建

电机执行器的预期应用之一是构建一个小型、低成本的四足平台具有与麻省理工学院猎豹3号机器人相似的动态能力。猎豹mini大约是麻省理工学院猎豹3的60%。重量9公斤,包括电池,它可以产生垂直力重量比为1.6体重每腿双腿完全塌陷,脚与身体的水平线速度为15.6 m s-1腿完全伸展。我们只做了几个实验机器在这一点上,到目前为止其动态性能看起来非常有希望。
1.机械设计
1、狗腿机械设计
腿部设计的两个主要目标
(1)尽量减少腿部质量和惯性最大运动范围和工作空间,同时满足连杆所需的强度和刚度要求。
一个低质量,低惯性腿高带宽执行器允许许多控制简化。对于大多数运行在麻省理工学院猎豹机器人上的控制器,我们由于这些特性,为了控制的目的,忽略腿的质量和惯性。例如,这让我们假设地面反作用力为1,其中是腿部雅可比矩阵和关节力矩-即忽略腿部动力学的力量控制。同样,摆动腿对身体的影响机器人通常也可以忽略,因为身体的惯性比腿的惯性小很多。
这些简化已被证明对控制麻省理工学院的猎豹机器人:已经实现的运动控制器关于猎豹3(凸MPC[11]),政策调整的MPC[10],余额QP)全部使用忽略腿部动力学的内部模型动态行为,如盲目爬楼梯,3米奔跑,鲁棒性踢、推和其他干扰。尽管已经到了极限机器人的性能通常需要考虑“完整”的机器人动力学,许多有用的行为都是使用更简单的模型工作的,这要归功于这种方法机器人的设计与驱动。
**支腿是串行驱动的,但是驱动第二个连杆的执行器被放置在与髋部执行器同轴,而不是在膝关节处。**这样可以最大限度地减少惯性由膝关节执行器添加到第一个链接。第二个连杆由皮带驱动通过腿的中空上部连接,并提供在执行器和下拉杆之间额外减少1.55:1,以增加膝盖扭矩。使用的皮带是带有芳纶拉伸构件的门式多链皮带。这些皮带设计用于在相对较低的速度下承受较高的力和冲击载荷能力。腿内侧有一对安全带张紧臂,可进行调整用两个固定螺丝固定皮带张力。张紧臂有一对小的靠着皮带背面滚动并推动皮带的端部轴承向内以增加皮带路径的长度。
在膝关节和膝关节之间使用皮带传动是主要设计妥协,在力控制带宽方面。尽管皮带使用的可能是这种尺寸中最坚硬的,它的硬度仍然远低于金属由于皮带张紧元件和皮带齿。因此,转子皮带共振频率仅为30hz。这个有效地限制了膝关节的开环转矩控制带宽频率。

腿部连接的设计是为了非常轻的重量和高刚度的方向

上拉杆承受弯曲载荷和扭转,需要内部驱动下连杆的皮带路径。上拉杆是由两部分组成的壳体设计,两个沿着边缘固定在一起的薄壁半部分,形成连续管。所有紧固件周围的凸台将两个半部分对齐,并取下当腿处于扭转或侧向时,两腿之间接缝处的剪切荷载弯曲,确保两半之间的紧固件不受剪切缝不能滑。大部分上拉杆的壁厚只有1.5毫米,所以上连杆的两半加上膝轴的质量为92克

在膝关节处,膝轴压入上连杆的一半。这个车轴穿过膝盖轴承的内圈,支撑下连杆。虽然这些零件可以作为一个零件加工,但几乎要翻一番所需材料的厚度,因此零件是分开制造并压装的并与固定胶粘合在一起。膝盖轴防止了两半在膝关节处扭伤大腿,大大增加扭伤上连杆的刚度。

臀部通过膝关节执行器连接到腿的上半部,使用膝关节执行器的外壳作为腿部结构。


2、躯干机械设计
电机控制驱动内置在执行器中,安装必要的机器人身上的部件出奇地简单。这些是:24伏锂离子无绳电钻电池;嵌入式计算机;矢量导航VN100坚固型IMU;计算机给执行器通信电子设备;以及足够的布线空间。内部部件的布置使车身内有足够的空间容纳一个或者两台小型电脑,比如UP board或NVIDIA Jetson
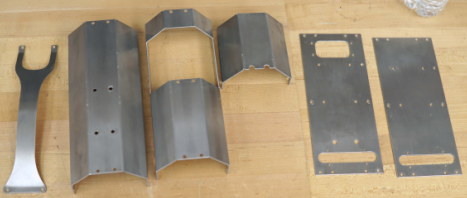
机器人的身体是由1.5毫米铝板,水射流切割和65弯曲成形。金属板在前部和后部之间形成一个轻质管双腿,弯曲和扭转时非常僵硬。两个内部塑料肋骨为金属板和内部组件提供了紧固点,如IMU和电池,有助于防止金属板因侧面碰撞
由喷水切割和弯曲1.5 mm 6061薄板制成的车身部件
装配体内部,显示内部框架加劲肋,电池架,顶部手柄。

3、脚部机械设计
脚部设计的一些指导原则
(1)抓地力
大多数表面的高摩擦系数接触角范围广:由于腿部的运动范围非常大,双脚应在地面上以同样宽的腿部范围进行牵引角。
(2)阻尼
虽然阻尼良好的脚意味着能量在每个脚步声,这似乎比“有弹性”的脚更可取,因为它可能会在接触和不接触中反弹。
(3)耐用性
非常柔软的脚部材料,如光滑的VytaFlex 20A聚氨酯,在猎豹3号上没坚持多久。目前在猎豹3号上我们使用VytaFlex60,经证明相当耐用,但阻尼非常低。
脚是由改良的南瓜球制成:一个3D打印的嵌件适合底部的末端腿的一环,穿过壁球上的一个洞。之间的差距插入件和球的内部填充有光滑的FlexFoam It 23,a可浇铸膨胀泡沫,具有与许多鞋用EVA泡沫相似的性能中底。这些材料结合在一起,使其柔软、防潮、紧握,并有望经久耐用脚。

4、布线接线保护
布线和电缆管理是每个复杂的机电装配。因为这个机器人的运动范围,膝关节电机的接线特别重要,因此电缆不必处于压力之下,不会意外地被任何540∘髋关节运动的旋转。
所有外部脚线都装在波纹塑料套管内,波纹塑料套管通过3D打印附件固定在两端。这些保证了电缆弯曲必须发生在连接器附近最终疲劳和失败。
2.硬件系统架构

1、嵌入式Linux计算机
为了实现高层次的位置控制,采用了单板机。这个UpBoard是一款小型、低功耗的嵌入式x86计算机,具有4核Intel Atomx5-Z8350处理器,4GB内存,大约5W峰值功耗。
UP Board运行带有PREEMPT-RT补丁的Linux内核来实现伪实时代码执行。运行在计算机上的各种软件通过轻量级通信和编组(LCM)进行通信[18]。LCM还允许对每个命令、传感器测量、内部控制变量等进行快速数据记录,在本例中为1khz,这对控制器来说是非常宝贵的开发和调试过程。

2、SPI转CAN的转接板
主板没有内置的CAN接口,因此需要与腿部执行器的中间电子设备进行通信。通信接口,称为脊椎位于计算机(“大脑”)和四肢之间,通过SPI(串行外围接口)总线与计算机通信。两个STM32F446微控制器在SPI总线上,每个微控制器产生2个CAN网络。因为这是同一个微控制器,用于电机的执行器控件,大部分通信代码都可以重用。逻辑电平CAN TXD来自微控制器引脚的RXD信号在CAN收发器之前通过RF数字隔离器,因此通信是电隔离5伏每个CAN总线的隔离DC-DC转换器为罐头收发机。脊柱还包括一个XBEE接收机,用于无线控制机器人。
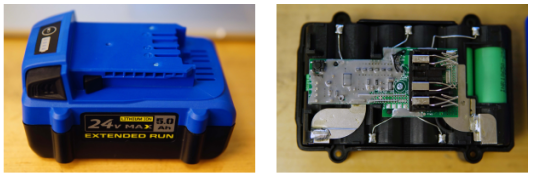
3、电池和预充电池电源板
机器人由一个车载Kobalt 24V Max 5 Ah锂离子电池供电,用于无绳电动工具。选择了现成的电动工具电池便于使用和坚固。它已经有一个内置的电池管理系统(BMS),欠压保护,易于使用的充电系统。它的机械当电池需要充电时,接口允许电池在几秒钟内换掉
为了与电池连接,我们制作了一个定制电源,它与蓄电池端子。电源采用5V,30W隔离DC-DC转换器为计算机和逻辑产生一个隔离的电源。这个电源有足够的开销来提供比所使用的主板更大的功率,因此将来更多的计算机不需要改变电源。到开关电源和逻辑开关,使用低边通晶体管,它可以通过小电流机械开关打开和关闭。打开电机功率需要注意,因为12个电机控制器加在一起输入电容。输入电容的总储能约为1.5j在24伏时,打开电机电源的开关必须能够消散电容器通过电阻充电的能量基本上是50%效率高。同时,瞬间开启电机电源会导致当电容器通过一个非常低的电阻连接开始充电时的电流。到为了减轻这些影响,设计了一种执行器电源开关的预充电电路。预充电电路首先通过一个功率电阻器缓慢地给电容器充电,在80毫秒的时间内,另一个晶体管会自动打开,无串联电阻,将大电流传递给执行器
预充电池电源电路原理
打开电池电源的预充电电路。当电源开关关闭,打开一个12V电源,对MOSFET Q1的栅极充电,然后开着。这使得输出电容不能通过功率电阻器充电R1,将充电电流限制在最大值V/R1。在固定延迟设置之后由R2、R3和C1构成的RC滤波器的时间常数,输出比较器打开,打开MOSFET Q2,它绕过了功率电阻器。反激二极管D1允许电流在开关关闭,这样输出上的电感不会引起电压尖峰会损坏pass晶体管或电机驱动器。

实验效果

额外的工作
参考资料
电机控制器硬件
https://github.com/bgkatz/3phase integrated
电机控制器固件
https://os.mbed.com/users/benkatz/code/hobbing
执行机构数据和分析工具
https://github.com/bgkatz/Actuator
∙四足动物做后空翻
https://youtu.be/bmymooopf3A
∙双边远程操作
https://youtu.be/FnQGPGG-vuQ