CanSM概念
AUTOSAR CanSM模块的分享分为CanSM模块概念详解和CanSM模块配置及代码分析,具体的项目实战请关注本号的后续文章,本篇为CanSM模块的概念详解篇。
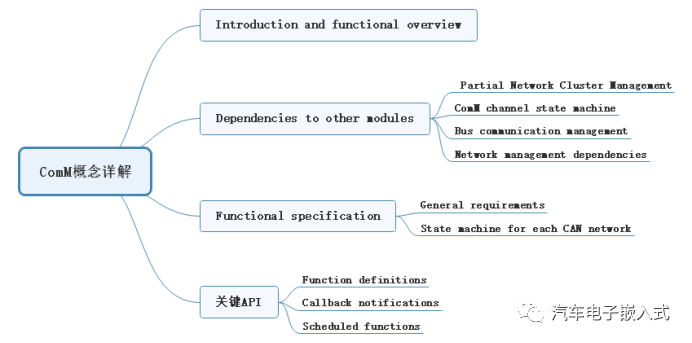
1 Introduction and functional overview
AUTOSAR BSW栈为每个通信总线指定一个总线特定的状态管理器。CANSM实现CAN总线的数据流控制。CanSM隶属于通信服务层。CanSM和通信硬件抽象层以及系统服务层交互。
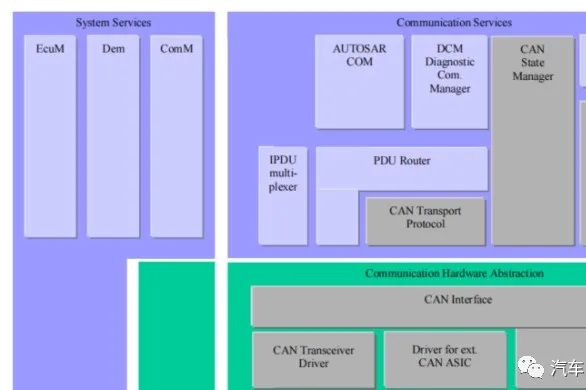
CanSM只用用于控制CAN通信。CanSM的任务就是操作CanIf模块去控制一个或者多个CAN控制器或者收发器驱动。
2. Dependencies to other modules
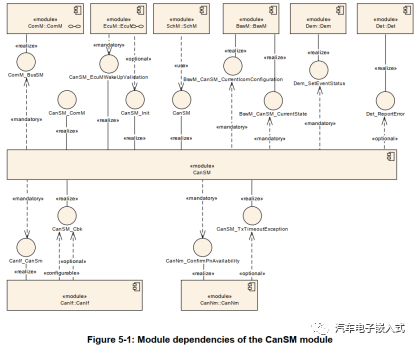
ECU State Manager (EcuM)
EcuM模块初始化CanSM模块,并与CanSM模块进行交互,以进行CAN唤醒验证。