作者简介:侯婷,机载激光雷达点云处理人员,本科毕业于河海大学,拥有15年以上的点云数据处理经验,精通点云催化剂(精简版称为“点云智绘”)和TerraSolid软件。
2020年6月20号,我们接到一通电话。电话里,对方的声音十分急促,显示出对方焦灼的心情。事情的原委是,他们以极其优惠的价格入手了一套全新的、某型号的无人机激光雷达(LiDAR)设备,打算结合传统的光学摄影测量技术,利用2020年3月份到9月份的时间,完成南方若干个地市、比例尺为1:2000的河道数字高程模型(DEM)生产任务。他们已经利用该LiDAR 设备采集了1个多月的数据,但是碰到一个极其棘手的问题。**问题是:利用市面上已有的机载LiDAR点云数据处理软件对该点云数据进行滤波(自动区别地面点、非地面点),发现计算机自动识别到的地面点极其稀少,需要大量的、繁重的人工编辑工作才能弥补计算机自动滤波结果的不足。另外,如果依靠人工编辑为主、计算机为辅的生产模式,一方面无法确保工期,另一方面即使找到充足的内业人员、也会导致人员成本支出远远的超出预算,如此的话,整个项目不仅没有任何盈利,还要赔钱。**陷入困境的他们四处寻访合适的软件,偶然听说,我们的点云催化剂软件有特色,抱着试试看的态度给我们拨通了电话。我们迅速利用他们提供的样例数据做了处理、并返回了DEM成果,他们完全认可DEM的质量。接下来,我们开展了涉及面积约200平方千米、长度约1700千米的河道DEM生产项目。有个问题,他们的点云到底有什么显著的不同?
**目前,市面上已经出现了一类新型的无人机LiDAR系统。该类新型的硬件设备有一个共同的特点:价格十分亲民,这十分有利于行业的普及或者产业化升级。这类LiDAR系统获取的点云数据也有两个共同的特点:第一,点云密度较大,单架次获取的点云密度一般优于10个点/平方米,甚至可以高达2000个点/平方米;第二,点云具有一定的厚度,各个厂家设备获取点云的厚度在3cm到30cm之间不等。**这一类设备对传统的测绘型激光雷达系统带来的前所未有的挑战,而且该类LiDAR硬件系统正在迅速向着重量轻小型化、使用和操作更加平民化的方向发展。与传统的测绘型激光雷达系统获取的点云相比,这一类设备获取的点云数据有一个最显著的区别,与传统的点云相比,该类点云具有一定的厚度。进一步,大多数人会有另一个疑问。有一定厚度的无人机LiDAR点云能否生产高精度、高分辨率的DEM?我们认为,如果厚度控制在一定的范围内,采用合适的软件和数据处理流程,完全可以满足高精度、高分辨率的DEM生产的需求。

图1具有一定厚度的某无人机LiDAR点云(显示了一个平顶房屋(右)的截面点云(左),厚度为13cm)
本案例将分享点云催化剂软件在河道DEM生产项目中的应用,并介绍一套完整的利用具有一定厚度的无人机LiDAR点云数据生产DEM的技术流程。
一、点云数据情况介绍
本项目中,利用无人机LiDAR系统,航飞高度110米,获取了河道及其两岸约150米幅宽的点云数据和光学影像数据,河道的累计长度约1700千米,任务是生产河道DEM数据。
本次河道数据获取时,从悬停起飞开始采集到悬停结束采集结束,数据文件组织按照架次进行,先沿航线采集河道一侧,再沿航线采集河道另一侧数据,数据情况如下:
覆盖范围大,涉及近百条河道,河道长度分布在1km-16km不等,相关的数据大小不一,如图2所示。
点密度大。平均点间隔分布在0.01-0.15m不等。另外,起降场的点云密度大、甚至有大量的重复点(冗余点),如图3所示。
点云数据按天组织,一日内可能包含多条河道数据,长度较长的河道需要多日数据。
文件存储:按照日期架次存储。
文件格式:Las1.2。
文件大小:单个文件的大小分布在几十兆至几百兆不等,如图3所示。点云厚度约20cm。“点云厚度”是宿城,确切的称谓为“点云的表面粗糙度”。由于激光雷达测距误差和POS系统随机误差等因素的影响,某一实体的表面即使为理想的平面,激光雷达点云在该实体区域表面分布可能存为一定的震荡,如图1所示,该震荡表现为点云具有一定的厚度、而不是理想的薄如蝉翼的平面。实际工程中,利用裸露的、硬质平面(比如硬化路面、平顶建筑物的房顶)作为检测平面。衡量表面粗糙度有两种方式。一种方式,首先计算检测平面内三维点的高程平均值,接着通过计算中误差值来评价点云在垂直高程方向高程的分布情况。另外一种方式,计算属于检测平面的所有三维点的最大高程值与最小高程值之差,该差值就是我们所说的“点云厚度”。本项目中,点云厚度约20cm。
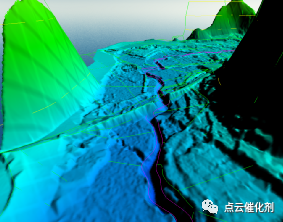
本项目中,某一段河道的点云数据如图4所示。


图2 河道分布示意图

图2河道点云数据的密度示意图
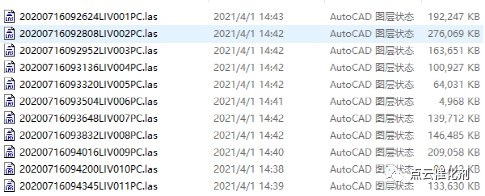
图3河道las文件数据大小示意图

图4河道点云数据示意图
二、技术路线
综合无人机激光雷达点云特点和TerraSolid软件、点云催化剂软件处理特点,设计了下述点云数据处理分析的流程,如图5所示。

图5 基于无人机激光雷达点云提取河道DEM技术流程图
具体步骤包括:
(1)点云数据的合并和分块(可选)
一个测区(一条河道)区域面积过大、las文件过多、点云数据量过大的情况下,可以将测区的所有点云数据先合并为一个整体、再进行分块处理。另外,河岸宽阔的河道点云数据也可在此进行合并、分块处理,也可以先逐个处理las点云文件、在全部las数据处理完成,再进行数据合并、分块。本案例中采用点云催化剂软件,先对每个las文件单独、逐一处理,计算机自动滤波后完成后再合并、分块。
(2)粗差识别和剔除(可选)
激光雷达点云中一般存在粗差,粗差往往会对后续的点云处理和信息提取带来负面效应,需要进行粗差的识别和剔除。点云催化剂软件中的滤波算法对低位粗差敏感。本案例需要对点云数据进行低位粗差检测。
(3)滤波
利用点云催化剂中的基于对象基元的不规则三角网渐进加密滤波算法将数据中的地面点和非地面点予以分离。本案例中,场景类型选择“河道”,其他参数采用默认值,如图6所示。

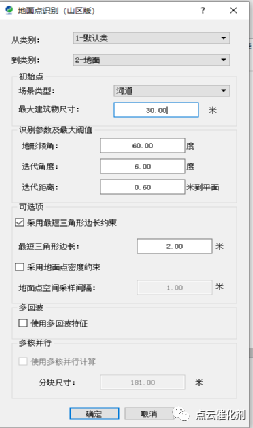
图6 点云催化剂中滤波参数设置界面
(4)平滑地面点(可选)
点云催化剂软件特殊的滤波算法机理会导致将更多的点识别为地面点,这也是为什么点云催化剂软件得到的地面点数量显著的高于其他软件的原因。如果识别的地面点的数量过多,可以采用平滑地面点工具对地面点进行特殊的抽稀处理。
(5)人工编辑
TerraSolid软件可以进行人工编辑。点云催化剂软件尚不具备人工编辑能力,目前需要借助TerraSolid进行人工编辑,并手动修补特征地形。
(6)添加水系特征线、生成DEM
在GlobalMapper软件中,综合利用无人机LiDAR点云中的地面点和立体摄影测量手绘的水系特征线(如图7所示),生成约束的不规则三角网、并内插出DEM。

图7采用摄影测量技术绘制的水系特征线
需要特殊说明的是,本案例中涉及点云催化剂软件的所有相关操作已经实现一键式的批处理,使用极其简单。在自动滤波阶段,点云催化剂软件采用了基于对象基元的滤波算法、算法的步骤更多、考虑的影响因素更全面。滤波效果方面,点云催化剂软件获取了更多的地面点,无论是平地、斜坡、陡坎、道路,还是建筑物周边、农田田埂、桥梁,均识别出了更多的地面点。这也是为什么人工编辑必不可少、需要去除建筑物、田埂、桥梁的残余点的原因。
三、河道DEM成果及其经验总结
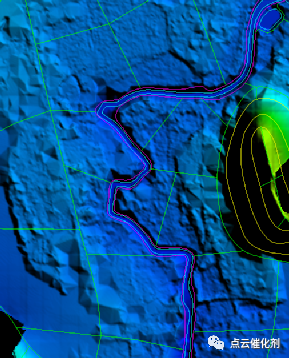
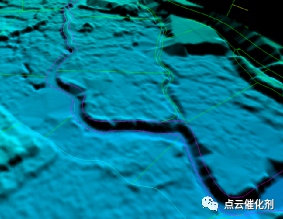
采用上述技术流程,生成的河道的部分DEM如8、图9所示。图8 展示了DEM套合水系特征线的二维、三维效果。将河道DEM数据与特征矢量套合显示,绿色为水涯线,红色为岸线,黄色的特征线包含山区等高线、田地特征线。图9展示了若干个河段点云数据的DEM成果,有平坦地区激光雷达数据处理结果,山区激光雷达数据处理结果。
(s)DEM套合地物特征线的二维展示
(b)DEM套合地物特征线的三维展示
图 8 水系特征线叠加到点云生成的DEM上的效果图(绿色为水涯线,红色为岸线,,黄色的特征线包含山区等高线、田地特征线)



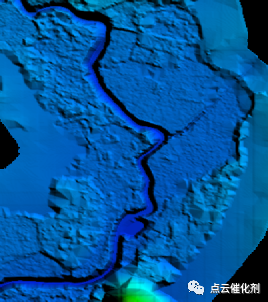
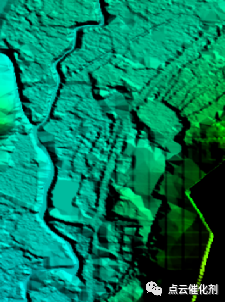
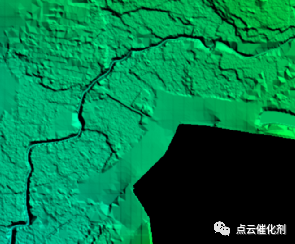
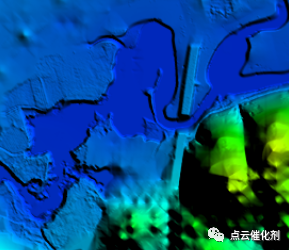

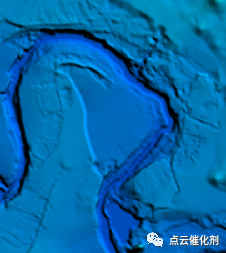
图9 河道DEM成果
通过本工程项目,我们得到经验为:
(1)计算机自动滤波是整个点云数据处理最关键的一步。滤波效果好,地面点和非地面点的区分得当,可以极大的减少后续人工编辑的时间花费。滤波中,容易发生两类错误。第一类错误,是把真实的地面点误分为地物点。第二类错误,是把真实的地物点识别为地面点。两类错误的必须同时控制在一定的范围内,才能提高整个点云生成DEM的效率。
(2)人工编辑是整个点云数据处理中最耗费时间的部分。人工编辑的目的就是修复计算机自动滤波的错误。自如前所述,自动滤波会存在两类错误。第一类错误,如果发生在平坦地形区域,则对DEM精度影响不大;而如果发生在陡坎附近,就会造成陡坎附近的地形点缺失,需要通过后续的人工编辑把地面点给找回来,而找回地面点的工作是一个相当耗费时间和人工的工作。第二类错误,比如把农田田埂、桥梁识别为地面点,操作员可以很快的、很轻松的把这些点通过人工编辑重新归类为地物点。因此,与修正第一类错误相比,修正第二类错误更简单、时间花费更少。另外,如果自动滤波结果中,两类错误的数量过多,则自动滤波就失去了本来的价值。
(3)中值面滤波,是一个理论层面可行、但工程操作层面无法落地的,想法。最小二乘、平差的理念深入测绘人的骨髓。碰到具有一定厚度的点云,测绘人的第一想法是把中值面找出来,这个想法是相当棒的。如果目前的计算机能够做到全自动的中值面滤波、滤波结果无需任何人工编辑、DEM满足成果精度要求,则中值面滤波完全可以实现从想法到生产。但实际的情况是,目前的计算机自动滤波总存在这样或那样的错误,就得需要人工编辑,而人眼是很难识别中值面上的点的。如果计算机自动滤波找出了中值面作为地面,而人工编辑采用了另一套规则,则最终的结果是整个最终的DEM的精度出现了空间分布不一致。
四、建议的具有一定厚度点云的DEM生产模式
本项目近1700千米的河道DEM生产经验表明,采用平民化的无人机LiDAR设备获取的具有一定厚度的点云数据,将点云厚度控制在一定的范围内(比如小于20cm),并采用合适的软件和数据处理流程,完全可以满足高精度、高分辨率的河道DEM生产的要求。
另外,在不显著的改变既有的基于TerraSolid软件生产DEM的技术流程基础上,综合使用点云催化剂软件与TerraSolid、GlobalMapper软件可以显著的提高河道DEM的制作效率。建议的工作模式为:
(1)使用点云催化剂的批处理功能进行一键式自动滤波。另外,可以充分利用内业人员的下班、休息时间、节假日、或闲暇的计算机开展本工作,这样可以充分发挥计算机的价值。
(2)基于TerraSolid软件的人工编辑处理。内业人员建立工程,对计算机已经自动滤波的点云数据进行合并、分块。工作日的上班时间,内业利用TerraSolid软件进行自动滤波结果的人工编辑。
(3)基于GlobalMapper软件的DEM生成。