一、论文简介
论文链接:https://openaccess.thecvf.com/content_ECCV_2018/html/Changqian_Yu_BiSeNet_Bilateral_Segmentation_ECCV_2018_paper.html
到目前为止,已被引用了将近500次,说明这篇文章还是非常有看点的,那我们今天就盘它了!
二、创新点及解决的问题
- 1.论文提出了一种能够保留丰富空间信息的Spatial path。现有的方法无非是用空洞卷积扩大感受野来获得足够的空间信息,或者是使用空间金字塔池化、空洞金字塔池化来获取足够大的感受野来获得空间信息或者是通过使用大的卷积核。感受野和空间信息对于获得高准确率是非常重要的,然而,这些方法是很难同时满足两个要求的(速度与准确率兼顾)。特别是,在实时语义分割的情况下,现有的现代方法利用小输入图像或轻量级基模型来加速。较小的输入图像丢失了原始图像的大部分空间信息,而轻量级模型通过通道剪枝破坏了空间信息。为了解决这个矛与盾的问题,论文提出了一种速度快、且能够保留空间信息的spatial path。
- 2.论文提出了一种能够提供足够感受野的Context path。在语义分割领域,感受野是非常重要的概念,现代的方法大都是利用空洞金字塔池化、金字塔池化来增大感受野,但是这种方法会大大耗费内存和需要大量的计算成本,这会导致低速率。考虑到获得较大的感受野和较高的计算效率,我们提出了context path。
三、网络结构

- 核心思想
- 1.论文提出了一条小步幅的空间信息路径(Spatial path)来保留空间信息以获取高像素的特征。
- 2.论文提出了一条上下文信息路径(Context path)来提供足够的感受野。
- 3.论文提出了一种特征融合模块(Feature Fusion Module),以高效的结合不同来自Spatial path和Context path的特征。
四、实验超参数
| 优化算法 | mini-batch stochastic gradient descent (SGD) |
|---|---|
| Momentum | 0.9 |
| Initial Learning rate | 2.5e−2 |
| learning rate strategy | Poly |
详细请看原文,这里只简单的例举几个常见的超参数。
五、实验
(1)Cityscapes数据集
- 1.Ablation for spatial path

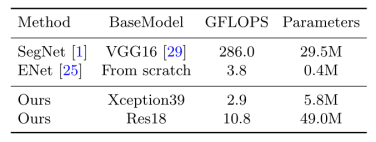
- 2.Accuracy and parameter analysis of our baseline model
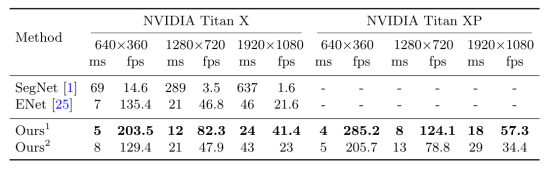
- 3.Speed comparison of our method against other state-of-the-art methods.
- 4.Accuracy and speed comparison of our method against other state-of-the-art methods on Cityscapes test dataset.

- 5.Accuracy comparison of our method against other state-of-the-art methods on Cityscapes test dataset.

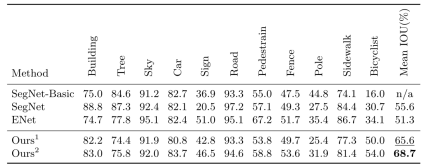
- 6.Accuracy result on CamVid test dataset.
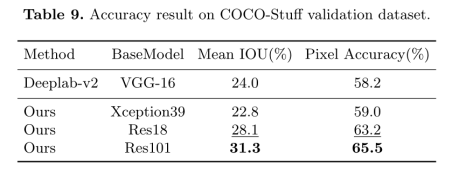
- 7.Accuracy result on COCO-Stuff validation dataset.